一种无人操作快速装车系统的制作方法
本发明涉及物料运输,具体是指一种无人操作快速装车系统。
背景技术:
1、粉状及颗粒状物料(如金属粉、矿物粉、食品原料、药品原料等)在生产完成后,最后进行会装车运送到加工厂进行进一步加工,常用的方式是使用铲车、吊装机等将堆放场的物料运输到货车上,或者通过传送带等输送装置将储存仓内的物料运输到货车中,两种方式都存在一些问题,装车过程中需要人工控制,货车或者铲车等需要时不时地调整位置,来保证物料铺设均匀,装车以及排队等待时间比较长,需要人工指挥装车,而且装车重量控制精度比较差,经常出现少装和多装的现象。
技术实现思路
1、本发明要解决的技术问题是克服上述困难,提供一种无人操作快速装车系统。
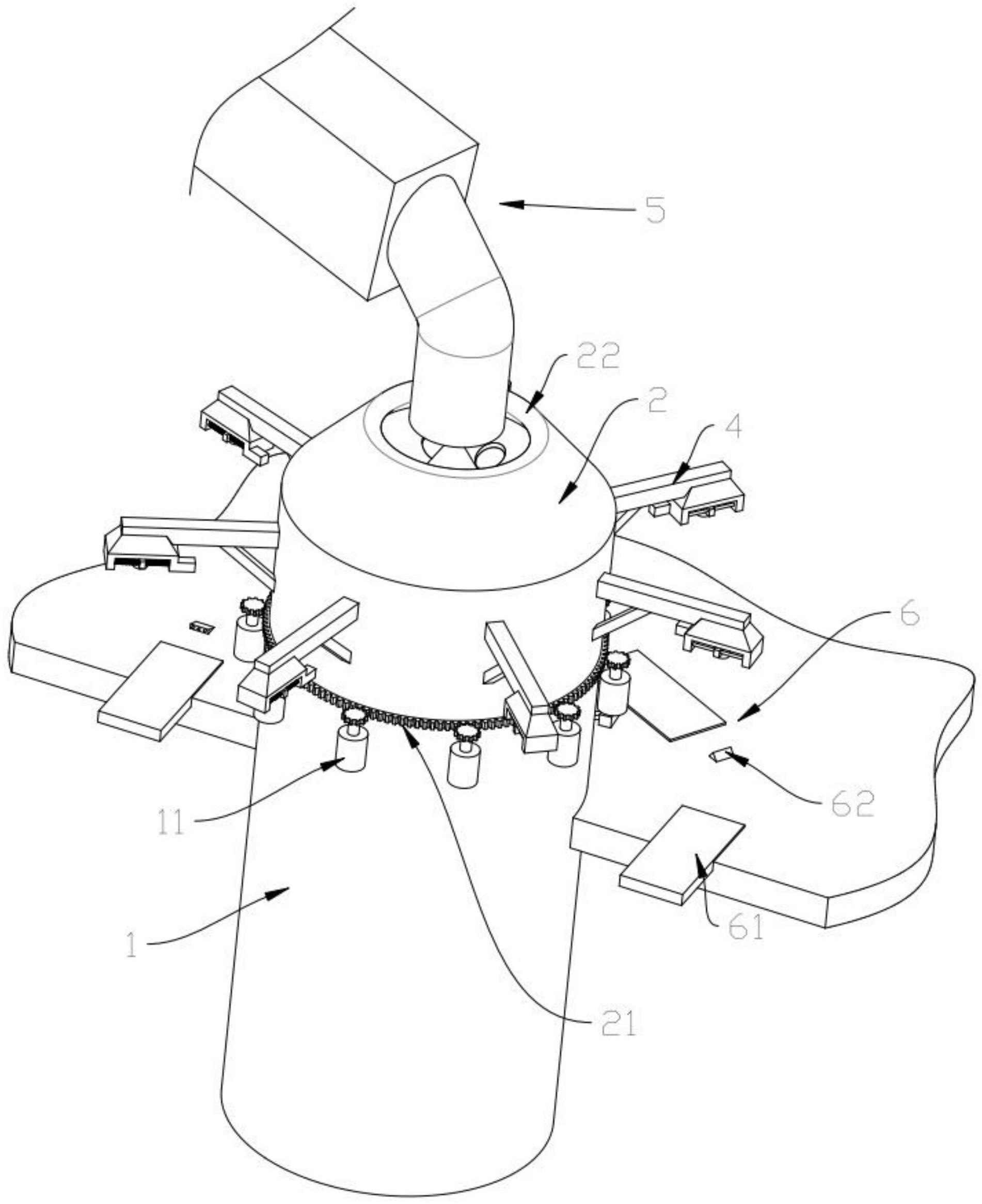
2、为解决上述技术问题,本发明提供的技术方案为:一种无人操作快速装车系统,包括储料仓,所述的储料仓部分埋入地面以下,所述的储料仓顶部转动设有分料仓,所述的储料仓顶部边侧设有多个电机一,多个所述的电机一带动分料仓实现转动效果,所述的分料仓内部固定设有多个取料装置,所述的分料仓外部设有多个装车送料装置,所述的装车送料装置与取料装置配合将储料仓内部的物料输送到货车上,所述的储料仓周围地面上设有多组识别控制装置,所述的识别控制装置包括地磅和识别器,所述的装车送料装置比识别控制装置数量多。
3、作为改进:所述的取料装置包括取料管,所述的取料管内转动设有螺旋杆一,所述的螺旋杆一顶部连接有电机二,所述的取料管底部开设有取料口,所述的取料口处设有铲台,所述的取料管上部开设有出料口,所述的取料口与出料口呈一定角度布置,所述的取料管外侧固定连接有结构梁,所述的结构梁与分料仓内壁固定连接,通过取料装置与分料仓配合,实现取料口转动取料效果,能够使储料仓内的物料等够均匀的输送出去。
4、作为改进:所述的装车送料装置包括横向送料臂和作用台,所述的横向送料臂一端与作用台固定连接,另一端深入分料仓侧方通孔连接有弹性连接管,所述的弹性连接管与出料口连接,所述的横向送料臂内转动设有螺旋杆二,所述的螺旋杆二一端固定连接有电机三,所述的电机三固定于横向送料臂一端内部,所述的作用台内侧顶部设有与横向送料臂内部通孔连通的集料槽,所述的集料槽底部连接有排料管,所述的横向送料臂底部设有支撑梁,所述的支撑梁与分料仓外侧固定连接,通过装车送料装置使取料装置输送的物料通过排料管输送到货车车厢内,随分料仓的转动,实现均匀送料效果。
5、作为改进:所述的作用台底部凹槽处对称设有导向柱和螺纹柱,所述的排料管两侧固定设有连接台一和连接台二,所述的导向柱穿过连接台一中心通孔并与连接台一滑动配合,所述的螺纹柱穿过连接台二中心处螺纹孔,所述的作用台一侧设有电机箱,所述的电机箱内固定设有电机四,所述的螺纹柱一端穿过作用台与电机四输出端固定连接,所述的排料管与集料槽之间连接有软管,所述的作用台底部边角处设有多个感应器,通过电机四带动排料管的左右移动,能够使排料管进行均匀布料,通过多个感应器能够识别车厢位置及角度,避免在转动过程中物料洒落。
6、作为改进:所述的分料仓底部外侧设有齿环,所述的电机一输出端连接有与齿环啮合的齿轮,所述的储料仓顶部设有环形导轨,所述的分料仓底部环槽内设有多个滚轮,所述的滚轮与环形导轨配合,实现分料仓及上部结构的转动效果。
7、作为改进:所述的分料仓顶部设有入料口,所述的入料口处设有分料斜台,所述的分料斜台上设有多处入料孔,所述的分料斜台中间处设有均料台,所述的均料台为空心锥体结构,便于物料在进入到储料仓后,使储料仓内的物料铺设均匀,方便取料装置取料。
8、作为改进:所述的识别器包括壳体,所述的壳体镶嵌于地面,所述的壳体内铰接设有识别台,所述的识别台内设有识别摄像头,所述的识别台两侧铰接连接有传动杆,所述的壳体内设有电动推杆,所述的电动推杆输出端与传动杆铰接,所述的识别台顶部在收纳状态下与地面齐平,通过识别器可以快速方便的实现识别车辆信息,能够更好地辅助装车送料装置完成物料装车操作。
9、作为改进:所述的储料仓内侧底部设有推料机,所述的推料机包括推料板,所述的推料板与储料仓内壁滑动配合,所述的推料板底部连接有多个液压推杆,所述的推料板顶部设有圆顶凸台,所述的圆顶凸台外径小于推料板外径,通过推料机可以实时控制储料仓内物料高度,配合均料台,可以将物料中间凸起的地方向四周平摊。
10、作为改进:所述的分料仓上方设有送料平台,所述的送料平台内设有输送带,所述的送料平台端部设有送料口,所述的送料口与入料口对齐,所述的送料平台通过梁架结构固定在地面上或通过悬吊结构固定于厂房顶部。
11、本发明与现有技术相比的优点在于:本系统实现了无人操作情况下的物料快速装车,通过旋转式装车方式,配合装车区域设计,实现了流动装车过程,极大提高了物料装车的效率,减少了排队等候的时间,具体来说:
12、1、储料仓与分料仓通过旋转配合的方式,使取料装置和装车送料装置实现转动式装车效果,配合识别控制装置的位置分布和数量差别,实现流动式快速装车;
13、2、取料装置和装车送料装置的配合,使储料仓内部的物料通过可移动的排料管将物料均匀地铺满车厢内;
14、3、通过识别控制装置能够快速识别车辆信息,本实时监控装车重量,能够精确把控物料装车重量,减少货车装车后再称重的时间;
15、4、均料台及推料机的配合,能够使物料在储料仓内均匀,保证取料装置取料顺利;
16、5、整体结构实现了无人控制,极大节约了人工成本,而且使整体装车流程更加高效化、精准化。
技术特征:
1.一种无人操作快速装车系统,包括储料仓(1),其特征在于:所述的储料仓(1)部分埋入地面以下,所述的储料仓(1)顶部转动设有分料仓(2),所述的储料仓(1)顶部边侧设有多个电机一(11),多个所述的电机一(11)带动分料仓(2)实现转动效果,所述的分料仓(2)内部固定设有多个取料装置(3),所述的分料仓(2)外部设有多个装车送料装置(4),所述的装车送料装置(4)与取料装置(3)配合将储料仓(1)内部的物料输送到货车上,所述的储料仓(1)周围地面上设有多组识别控制装置(6),所述的识别控制装置(6)包括地磅(61)和识别器(62),所述的装车送料装置(4)比识别控制装置(6)数量多。
2.根据权利要求1所述的一种无人操作快速装车系统,其特征在于:所述的取料装置(3)包括取料管(31),所述的取料管(31)内转动设有螺旋杆一(32),所述的螺旋杆一(32)顶部连接有电机二(33),所述的取料管(31)底部开设有取料口(311),所述的取料口(311)处设有铲台(312),所述的取料管(31)上部开设有出料口(313),所述的取料口(311)与出料口(313)呈一定角度布置,所述的取料管(31)外侧固定连接有结构梁(34),所述的结构梁(34)与分料仓(2)内壁固定连接。
3.根据权利要求2所述的一种无人操作快速装车系统,其特征在于:所述的装车送料装置(4)包括横向送料臂(41)和作用台(42),所述的横向送料臂(41)一端与作用台(42)固定连接,另一端深入分料仓(2)侧方通孔连接有弹性连接管(46),所述的弹性连接管(46)与出料口(313)连接,所述的横向送料臂(41)内转动设有螺旋杆二(411),所述的螺旋杆二(411)一端固定连接有电机三(412),所述的电机三(412)固定于横向送料臂(41)一端内部,所述的作用台(42)内侧顶部设有与横向送料臂(41)内部通孔连通的集料槽(423),所述的集料槽(423)底部连接有排料管(43),所述的横向送料臂(41)底部设有支撑梁(45),所述的支撑梁(45)与分料仓(2)外侧固定连接。
4.根据权利要求3所述的一种无人操作快速装车系统,其特征在于:所述的作用台(42)底部凹槽处对称设有导向柱(421)和螺纹柱(422),所述的排料管(43)两侧固定设有连接台一(431)和连接台二(432),所述的导向柱(421)穿过连接台一(431)中心通孔并与连接台一(431)滑动配合,所述的螺纹柱(422)穿过连接台二(432)中心处螺纹孔,所述的作用台(42)一侧设有电机箱(44),所述的电机箱(44)内固定设有电机四(441),所述的螺纹柱(422)一端穿过作用台(42)与电机四(441)输出端固定连接,所述的排料管(43)与集料槽(423)之间连接有软管(433),所述的作用台(42)底部边角处设有多个感应器(47)。
5.根据权利要求1所述的一种无人操作快速装车系统,其特征在于:所述的分料仓(2)底部外侧设有齿环(21),所述的电机一(11)输出端连接有与齿环(21)啮合的齿轮(111),所述的储料仓(1)顶部设有环形导轨(12),所述的分料仓(2)底部环槽内设有多个滚轮(25),所述的滚轮(25)与环形导轨(12)配合。
6.根据权利要求1所述的一种无人操作快速装车系统,其特征在于:所述的分料仓(2)顶部设有入料口(22),所述的入料口(22)处设有分料斜台(23),所述的分料斜台(23)上设有多处入料孔(232),所述的分料斜台(23)中间处设有均料台(231),所述的均料台(231)为空心锥体结构。
7.根据权利要求1所述的一种无人操作快速装车系统,其特征在于:所述的识别器(62)包括壳体(621),所述的壳体(621)镶嵌于地面,所述的壳体(621)内铰接设有识别台(622),所述的识别台(622)内设有识别摄像头(623),所述的识别台(622)两侧铰接连接有传动杆(625),所述的壳体(621)内设有电动推杆(624),所述的电动推杆(624)输出端与传动杆(625)铰接,所述的识别台(622)顶部在收纳状态下与地面齐平。
8.根据权利要求1所述的一种无人操作快速装车系统,其特征在于:所述的储料仓(1)内侧底部设有推料机(7),所述的推料机(7)包括推料板(71),所述的推料板(71)与储料仓(1)内壁滑动配合,所述的推料板(71)底部连接有多个液压推杆(72),所述的推料板(71)顶部设有圆顶凸台(73),所述的圆顶凸台(73)外径小于推料板(71)外径。
9.根据权利要求6所述的一种无人操作快速装车系统,其特征在于:所述的分料仓(2)上方设有送料平台(5),所述的送料平台(5)内设有输送带(51),所述的送料平台(5)端部设有送料口(52),所述的送料口(52)与入料口(22)对齐,所述的送料平台(5)通过梁架结构固定在地面上或通过悬吊结构固定于厂房顶部。
技术总结
本发明公开了一种无人操作快速装车系统,包括储料仓,储料仓部分埋入地面以下,储料仓顶部转动设有分料仓,储料仓顶部边侧设有多个电机一,多个电机一带动分料仓实现转动效果,分料仓内部固定设有多个取料装置,分料仓外部设有多个装车送料装置,装车送料装置与取料装置配合将储料仓内部的物料输送到货车上,储料仓周围地面上设有多组识别控制装置,识别控制装置包括地磅和识别器,本系统实现了无人操作情况下的物料快速装车,通过旋转式装车方式,配合装车区域设计,极大提高了物料装车的效率,减少了排队等候的时间,实现了无人控制,极大节约了人工成本,而且使整体装车流程更加高效化、精准化。
技术研发人员:李金臻,李德遂
受保护的技术使用者:江苏华菲凌云科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!