一种基于机器视觉引导的物料精准吸取系统和方法与流程
本发明涉及工业生产领域,特别涉及一种基于机器视觉引导的物料精准吸取系统和方法。
背景技术:
1、在工业生产中,尤其是电子产品行业,物料的移送多采用自动化方式完成,很少采用人工上下料,具体的,对于小型物料来说,常见的自动上料方式多为振动盘振动上料,但是,当物料的形状比较奇特,无法采用振动盘振动上料时,就只能依靠人工上料,大大影响上料效率。
2、此外,振动盘的结构特性是跟其输送的物料相适配的,更换物料意味着振动盘需要重新设计定制,可见,振动盘上料普适性差,不具有广谱性。
技术实现思路
1、本发明的主要目的是提出一种基于机器视觉引导的物料精准吸取系统和方法,旨在解决上述背景技术中提出的问题。
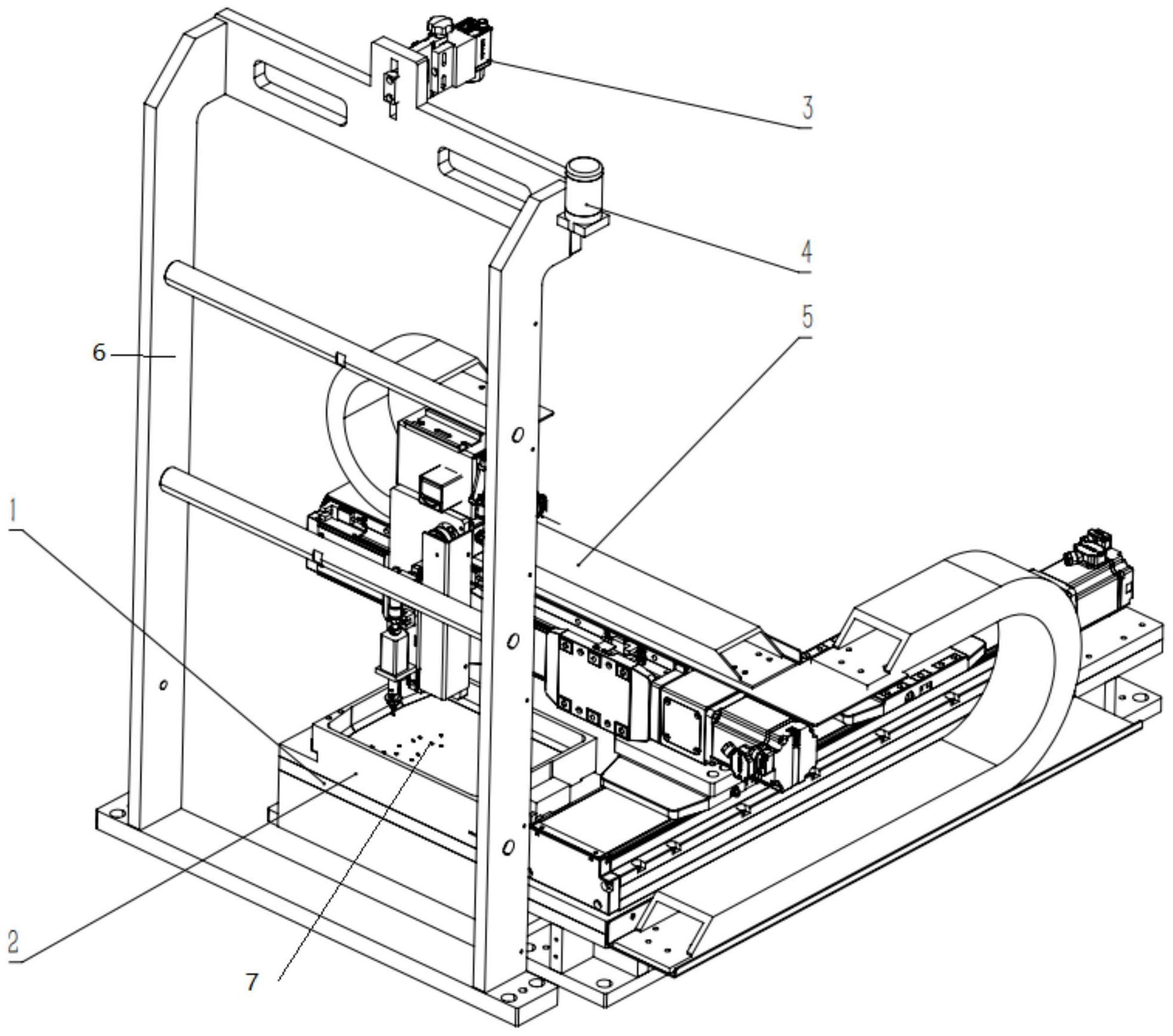
2、为解决上述问题,本发明提出了一种基于机器视觉引导的物料精准吸取系统,包括三轴机械手、振动盘、工业相机,所述工业相机位于振动盘的上方,所述工业相机能够识别出振动盘中物料的位置,并将物料的位置信息传递给三轴机械手,由三轴机械手前往振动盘中吸取相应的物料。
3、在一实施例中,所述振动盘为透明振动盘,所述透明振动盘的底部设置有面光源。
4、在一实施例中,所述工业相机固设于支架上,所述支架上还安装有信号灯。
5、此外,本发明还提出了一种基于机器视觉引导的物料精准吸取方法,采用前述任一项的一种基于机器视觉引导的物料精准吸取系统执行以下步骤:
6、s1、控制工业相机对着振动盘拍摄图像;
7、s2、对图像进行预处理,获取图像中物料的位置信息;
8、s3、将图像中物料的位置信息转换为对应空间中的物理坐标信息;
9、s4、根据物料的物理坐标信息控制三轴机械手前往吸取物料。
10、在一实施例中,步骤s2中对图像进行预处理后,若获取不到图像中物料的位置信息,则控制振动盘振动,再重新进行步骤s1-s4。
11、在一实施例中,所述振动盘振动次数为重复多次,每次振动包括左右聚拢振动、上下聚拢振动和振散。
12、在一实施例中,所述振动盘振动后,重新进行步骤s1-s4的过程中,若还获取不到图像中物料的位置信息,则控制信号灯闪烁,提醒人工补料。
13、在一实施例中,所述振动盘振动后,重新进行步骤s1-s4之前,需清除工业相机中的数据信息。
14、在一实施例中,步骤s2中对图像进行预处理,获取图像中物料的位置信息包括:对图像进行高斯滤波、图像增强,接着再进行ncc模板匹配处理,搜索并训练匹配出各个物料的中心,其中搜索区域设定为图像的正中间区域,以减小边缘失真影响,保证图像质量。
15、在一实施例中,步骤s3将图像中物料的位置信息转换为对应空间中的物理坐标信息包括:
16、采用九点标定法确定像素坐标和物理坐标的转换关系;
17、根据转换关系将物料的像素坐标转换为物理坐标。
18、有益效果:本发明的基于机器视觉引导的物料精准吸取系统利用工业相机获取振动盘中物料的位置信息,然后控制三轴机械手前往振动盘中吸取物料,如此上料方式不受物料形状所限,能够完成各自物料的上料作业,普适性好,相比人工上料,速度快、效率高,有助于提升生产效率。
技术特征:
1.一种基于机器视觉引导的物料精准吸取系统,其特征在于,包括三轴机械手、振动盘、工业相机,所述工业相机位于振动盘的上方,所述工业相机能够识别出振动盘中物料的位置,并将物料的位置信息传递给三轴机械手,由三轴机械手前往振动盘中吸取相应的物料。
2.如权利要求1所述的一种基于机器视觉引导的物料精准吸取系统,其特征在于,所述振动盘为透明振动盘,所述透明振动盘的底部设置有面光源。
3.如权利要求1所述的一种基于机器视觉引导的物料精准吸取系统,其特征在于,所述工业相机固设于支架上,所述支架上还安装有信号灯。
4.一种基于机器视觉引导的物料精准吸取方法,其特征在于,采用权利要求1-3任一项的一种基于机器视觉引导的物料精准吸取系统执行以下步骤:
5.如权利要求4所述的一种基于机器视觉引导的物料精准吸取方法,其特征在于,步骤s2中对图像进行预处理后,若获取不到图像中物料的位置信息,则控制振动盘振动,再重新进行步骤s1-s4。
6.如权利要求5所述的一种基于机器视觉引导的物料精准吸取方法,其特征在于,所述振动盘振动次数为重复多次,每次振动包括左右聚拢振动、上下聚拢振动和振散。
7.如权利要求5所述的一种基于机器视觉引导的物料精准吸取方法,其特征在于,所述振动盘振动后,重新进行步骤s1-s4的过程中,若还获取不到图像中物料的位置信息,则控制信号灯闪烁,提醒人工补料。
8.如权利要求5所述的一种基于机器视觉引导的物料精准吸取方法,其特征在于,所述振动盘振动后,重新进行步骤s1-s4之前,需清除工业相机中的数据信息。
9.如权利要求4所述的一种基于机器视觉引导的物料精准吸取方法,其特征在于,步骤s2中对图像进行预处理,获取图像中物料的位置信息包括:对图像进行高斯滤波、图像增强,接着再进行ncc模板匹配处理,搜索并训练匹配出各个物料的中心,其中搜索区域设定为图像的正中间区域,以减小边缘失真影响,保证图像质量。
10.如权利要求4所述的一种基于机器视觉引导的物料精准吸取方法,其特征在于,步骤s3将图像中物料的位置信息转换为对应空间中的物理坐标信息包括:
技术总结
本发明公开了一种基于机器视觉引导的物料精准吸取系统和方法,其中所述一种基于机器视觉引导的物料精准吸取系统包括三轴机械手、振动盘、工业相机,所述工业相机位于振动盘的上方,所述工业相机能够识别出振动盘中物料的位置,并将物料的位置信息传递给三轴机械手,由三轴机械手前往振动盘中吸取相应的物料。有益效果:本发明的基于机器视觉引导的物料精准吸取系统利用工业相机获取振动盘中物料的位置信息,然后控制三轴机械手前往振动盘中吸取物料,如此上料方式不受物料形状所限,能够完成各自物料的上料作业,普适性好,相比人工上料,速度快、效率高,有助于提升生产效率。
技术研发人员:陈远明,张金龙,丁亚鹏,杨小军
受保护的技术使用者:上海轩田工业设备有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!