基于无人叉车的物流仓储管理系统的制作方法
本发明属于仓储管理,具体涉及一种基于无人叉车的物流仓储管理系统。
背景技术:
1、近年来,随着工业自动化与智能制造成为主流趋势,物流自动化的趋势不可逆转,包括无人叉车在内的自动化、智能化搬运工具迎来前所未有的发展机遇。“无人叉车”又称“无人驾驶叉车”,或是agv(英文全称:automated guided vehicle)叉车,由于能够进行自动装卸、自动运行,已经成为物流现场、工厂走向智能化必不可少的设备。但现有无人叉车只是简单地具备了无人操控的能力,只能用于与货物的自动对接,而无法与电梯设备进行自动对接,如中国实用新型专利授权公告号cn213264525u介绍的“一种无人叉车及无人叉车自动搬运对接系统”。在不同楼层的物流运输过程中,电梯是必不可少的连接桥梁,上述叉车无法进入到电梯,运送货物到相应楼层时只能将货物暂时堆放在电梯口处,由人工逐个搬入电梯内,待到达预定楼层后,再由人工搬出并堆放在电梯口处,由预设在该楼层的叉车将货物搬运至目的地,缺陷在于,搬运货物的整个过程不够连贯,中途仍需要人工参与,若运送货物的数量较多,体积较大,重量较重,再由人工搬进及搬出电梯势必会非常麻烦。
2、鉴于上述已有技术,如何提高无人叉车的智能化程度,提高无人叉车操作的作业效率是目前亟须解决的技术问题。为此,本申请人作了有益的设计,下面将要介绍的技术方案便是在这种背景下产生的。
技术实现思路
1、本发明的目的在于提供一种基于无人叉车的物流仓储管理系统,能够实现无人化的货物自动快速运输,提高物流运行效率。
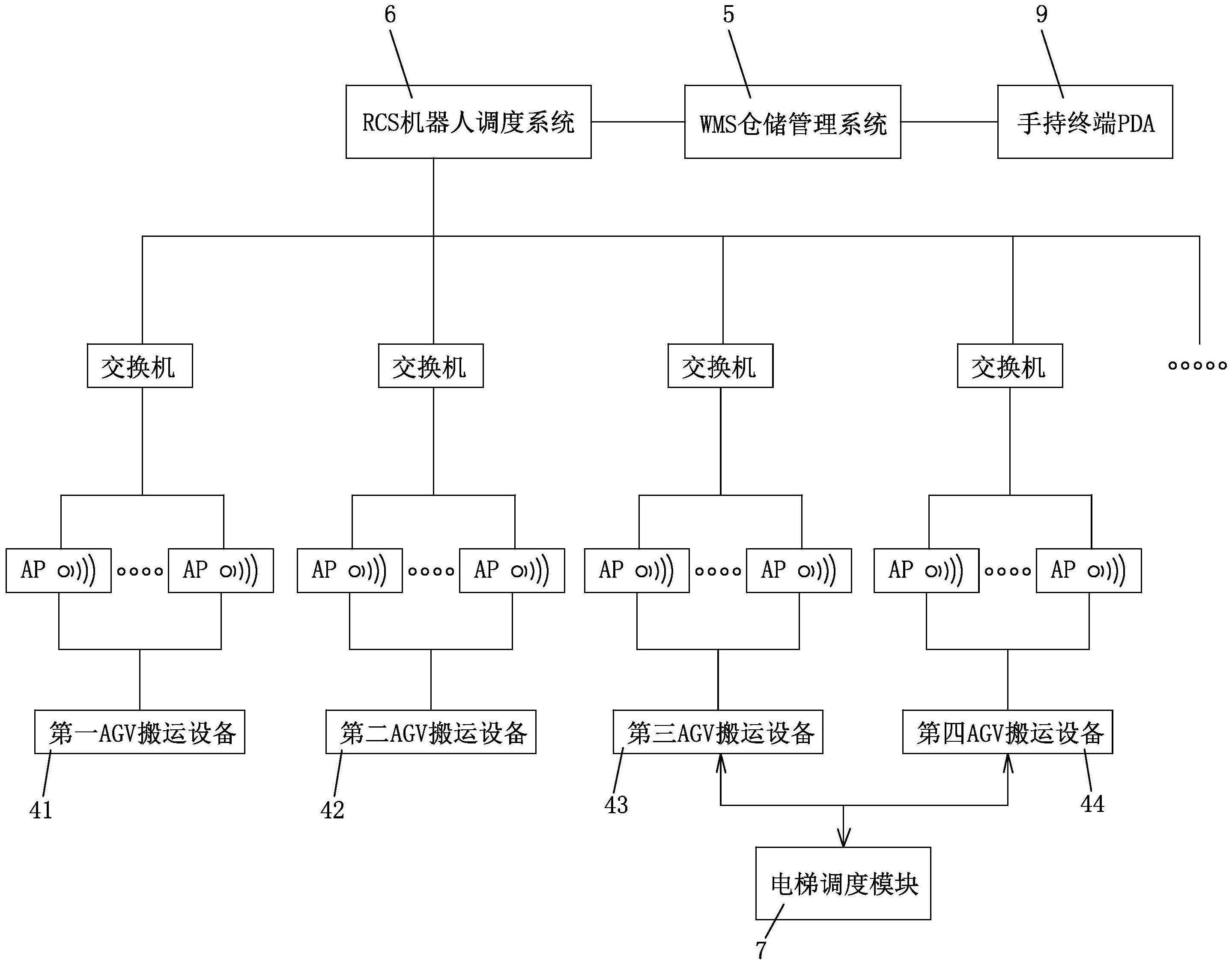
2、本发明的目的是这样来达到的,一种基于无人叉车的物流仓储管理系统,其特征在于,包括:装卸楼层;所述的装卸楼层上设置有装卸缓存区、入库缓存区以及出库缓存区;多个仓储楼层,每个仓储楼层上设置有放货区;升降电梯;设置在装卸楼层和各个仓储楼层之间,用于在装卸楼层和各仓储楼层之间运送目标货物;第一agv搬运设备,用于在运输车与装卸缓存区之间搬运目标货物;第二agv搬运设备,用于在装卸缓存区与入库缓存区之间搬运目标货物;第三agv搬运设备,用于在入库缓存区与升降电梯的轿厢之间搬运目标货物;第四agv搬运设备,用于在升降电梯的轿厢与放货区之间搬运目标货物,其特征在于,还包括wms仓储管理系统、rcs机器人调度系统、电梯调度模块以及视觉感应模块,所述的wms仓储管理系统与rcs机器人调度系统通信连接,所述的rcs机器人调度系统与所述第一agv搬运设备、第二agv搬运设备、第三agv搬运设备以及第四agv搬运设备无线通信连接,所述电梯调度模块安装在升降电梯的轿厢内与电梯控制箱电连接,并与所述第三agv搬运设备以及第四agv搬运设备无线通信连接,当所述rcs机器人调度系统控制第三agv搬运设备行至升降电梯时,所述第三agv搬运设备无线通信连接电梯调度模块,使升降电梯到达装卸楼层并打开轿厢门,供第三agv搬运设备将目标货物搬运至升降电梯的轿厢内,待第三agv搬运设备搬运完成并离开升降电梯时所述电梯调度模块控制升降电梯运行至预设的仓储楼层并打开轿厢门,同时所述电梯调度模块无线通信连接第四agv搬运设备将目标货物从升降电梯的轿厢搬运至放货区,所述的视觉感应模块安装在入库缓存区和出库缓存区的上方,用于检测入库缓存区和出库缓存区是否存在货物,视觉感应模块与所述的rcs机器人调度系统通信连接。
3、在本发明的一个具体的实施例中,还包括手持终端pda,所述的手持终端pda与所述的wms仓储管理系统通信连接,目标货物到达时所述wms仓储管理系统生成货物条形码并贴于目标货物,所述的手持终端pda用于扫描货物条形码进行出入库管理。
4、在本发明的另一个具体的实施例中,所述wms仓储管理系统用于出入库管理,所述rcs机器人调度系统根据wms仓储管理系统的操作指令,控制第一agv搬运设备、第二agv搬运设备、第三agv搬运设备以及第四agv搬运设备完成相应搬运作业,所述第一agv搬运设备、第二agv搬运设备、第三agv搬运设备以及第四agv搬运设备搬运完成后将目标货物的放置区反馈给rcs机器人调度系统后,再由rcs机器人调度系统反馈给wms仓储管理系统。
5、在本发明的再一个具体的实施例中,所述rcs机器人调度系统通过多个交换机并以无线ap热点的方式实现与第一agv搬运设备、第二agv搬运设备、第三agv搬运设备以及第四agv搬运设备之间的通信连接。
6、在本发明的进而一个具体的实施例中,所述装卸楼层上还设置有用于所述第一agv搬运设备、第二agv搬运设备以及第三agv搬运设备停放的装卸楼层agv等待区,所述仓储楼层上还设置有用于所述第四agv搬运设备停放的仓储楼层agv等待区。
7、本发明由于采用了上述结构,与现有技术相比,具有的有益效果是:智能化水平高,能够实现无人化的货物自动快速运输,不但能够提升仓储管理效率,还可以减少人工开支。
技术特征:
1.一种基于无人叉车的物流仓储管理系统,其特征在于,包括:装卸楼层(1),所述的装卸楼层(1)上设置有装卸缓存区(11)、入库缓存区(12)以及出库缓存区(13);多个仓储楼层(2),每个仓储楼层(2)上设置有放货区(21);升降电梯(3),所述的升降电梯(3)设置在装卸楼层(1)和各个仓储楼层(2)之间,用于在装卸楼层(1)和各仓储楼层(2)之间运送目标货物;第一agv搬运设备(41),用于在运输车与装卸缓存区(11)之间搬运目标货物;第二agv搬运设备(42),用于在装卸缓存区(11)与入库缓存区(12)之间搬运目标货物;第三agv搬运设备(43),用于在入库缓存区(12)与升降电梯(3)的轿厢之间搬运目标货物;第四agv搬运设备(44),用于在升降电梯(3)的轿厢与放货区(21)之间搬运目标货物,其特征在于,还包括wms仓储管理系统(5)、rcs机器人调度系统(6)、电梯调度模块(7)以及视觉感应模块(8),所述的wms仓储管理系统(5)与rcs机器人调度系统(6)通信连接,所述的rcs机器人调度系统(6)与所述第一agv搬运设备(41)、第二agv搬运设备(42)、第三agv搬运设备(43)以及第四agv搬运设备(44)无线通信连接,所述电梯调度模块(7)安装在升降电梯(3)的轿厢内与电梯控制箱电连接,并与所述第三agv搬运设备(43)以及第四agv搬运设备(44)无线通信连接,当所述rcs机器人调度系统(6)控制第三agv搬运设备(43)行至升降电梯(3)时,所述第三agv搬运设备(43)无线通信连接电梯调度模块(7),使升降电梯(3)到达装卸楼层(1)并打开轿厢门,供第三agv搬运设备(43)将目标货物搬运至升降电梯(3)的轿厢内,待第三agv搬运设备(43)搬运完成并离开升降电梯(3)时所述电梯调度模块(7)控制升降电梯(3)运行至预设的仓储楼层(2)并打开轿厢门,同时所述电梯调度模块(7)无线通信连接第四agv搬运设备(44),将目标货物从升降电梯(3)的轿厢搬运至放货区(21),所述的视觉感应模块(8)安装在入库缓存区(12)和出库缓存区(13)的上方,用于检测入库缓存区(12)和出库缓存区(13)是否存在货物,视觉感应模块(8)与所述的rcs机器人调度系统(6)通信连接。
2.根据权利要求1所述的基于无人叉车的物流仓储管理系统,其特征在于还包括手持终端pda(9),所述的手持终端pda(9)与所述的wms仓储管理系统(5)通信连接,目标货物到达时所述wms仓储管理系统(5)生成货物条形码并贴于目标货物,所述的手持终端pda(9)用于扫描货物条形码进行出入库管理。
3.根据权利要求1所述的基于无人叉车的物流仓储管理系统,其特征在于所述wms仓储管理系统(5)用于出入库管理,所述rcs机器人调度系统(6)根据wms仓储管理系统(5)的操作指令,控制第一agv搬运设备(41)、第二agv搬运设备(42)、第三agv搬运设备(43)以及第四agv搬运设备(44)完成相应搬运作业,所述第一agv搬运设备(41)、第二agv搬运设备(42)、第三agv搬运设备(43)以及第四agv搬运设备(44)搬运完成后将目标货物的放置区反馈给rcs机器人调度系统(6)后,再由rcs机器人调度系统(6)反馈给wms仓储管理系统(5)。
4.根据权利要求1所述的基于无人叉车的物流仓储管理系统,其特征在于所述rcs机器人调度系统(6)通过多个交换机并以无线ap热点的方式实现与第一agv搬运设备(41)、第二agv搬运设备(42)、第三agv搬运设备(43)以及第四agv搬运设备(44)之间的通信连接。
5.根据权利要求1所述的基于无人叉车的物流仓储管理系统,其特征在于所述装卸楼层(1)上还设置有用于所述第一agv搬运设备(41)、第二agv搬运设备(42)以及第三agv搬运设备(43)停放的装卸楼层agv等待区(14),所述仓储楼层(2)上还设置有用于所述第四agv搬运设备(44)停放的仓储楼层agv等待区(22)。
技术总结
一种基于无人叉车的物流仓储管理系统,属于仓储管理技术领域。包括:装卸楼层;多个仓储楼层;升降电梯;第一AGV搬运设备;第二AGV搬运设备;第三AGV搬运设备;第四AGV搬运设备,还包括WMS仓储管理系统、RCS机器人调度系统、电梯调度模块以及视觉感应模块,所述的WMS仓储管理系统与RCS机器人调度系统通信连接,所述的RCS机器人调度系统与第一AGV搬运设备、第二AGV搬运设备、第三AGV搬运设备以及第四AGV搬运设备无线通信连接,所述电梯调度模块与第三AGV搬运设备以及第四AGV搬运设备无线通信连接。优点:能够实现无人化的货物自动快速运输,不但能够提升仓储管理效率,还可以减少人工开支。
技术研发人员:王振国
受保护的技术使用者:苏州华诚海虞仓储有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!