一种AGV机器人的制作方法
本发明涉及agv机器,具体为一种agv机器人。
背景技术:
1、agv即:automatedguidedvehicle简称agv,当前最常见的应用如:agv搬运机器人或agv小车,主要功用集中在自动物流搬转运,agv搬运机器人是通过特殊地标导航自动将物品运输至指定地点,最常见的引导方式为磁条引导,激光引导,rfid引导等。磁条引导的方式是常用也是成本最低的方式,但是站点设置有一定的局限性以及对场地装修风格有一定影响;激光引导成本最高对场地要求也比较高所以一般不采用;rfid引导成本适中,其优点是引导精度高,站点设置更方便可满足最复杂的站点布局,对场所整体装修环境无影响,其次rfid高安全性稳定性也是磁条导航和激光导航方式不具备的;
2、已有类似agv机器人,可以实现升降搬运技术,其行走采用舵轮,升降设计移植了类似汽保设备的液压升降机构(液压缸推动剪刀叉机构),电源采用dc48v液压单元。
3、原有dc48v液压单元驱动的升降机构,存在以下几个问题:
4、带负载上升时,液压单元噪音非常大;
5、液压单元(液压泵站及液压缸)容易漏油;
6、下降速度不可控,完全靠开启溢流阀之类的阀体,由负载自重迫使液压缸内液压油溢出至液压泵站,速度无法控制;
7、偏载时会导致剪刀叉机构出现歪斜。
技术实现思路
1、本发明针对现有技术中存在的技术问题,提供一种agv机器人,来解决上述中提到的现有的agv机器人偏载时会导致剪刀叉机构出现歪斜的问题。
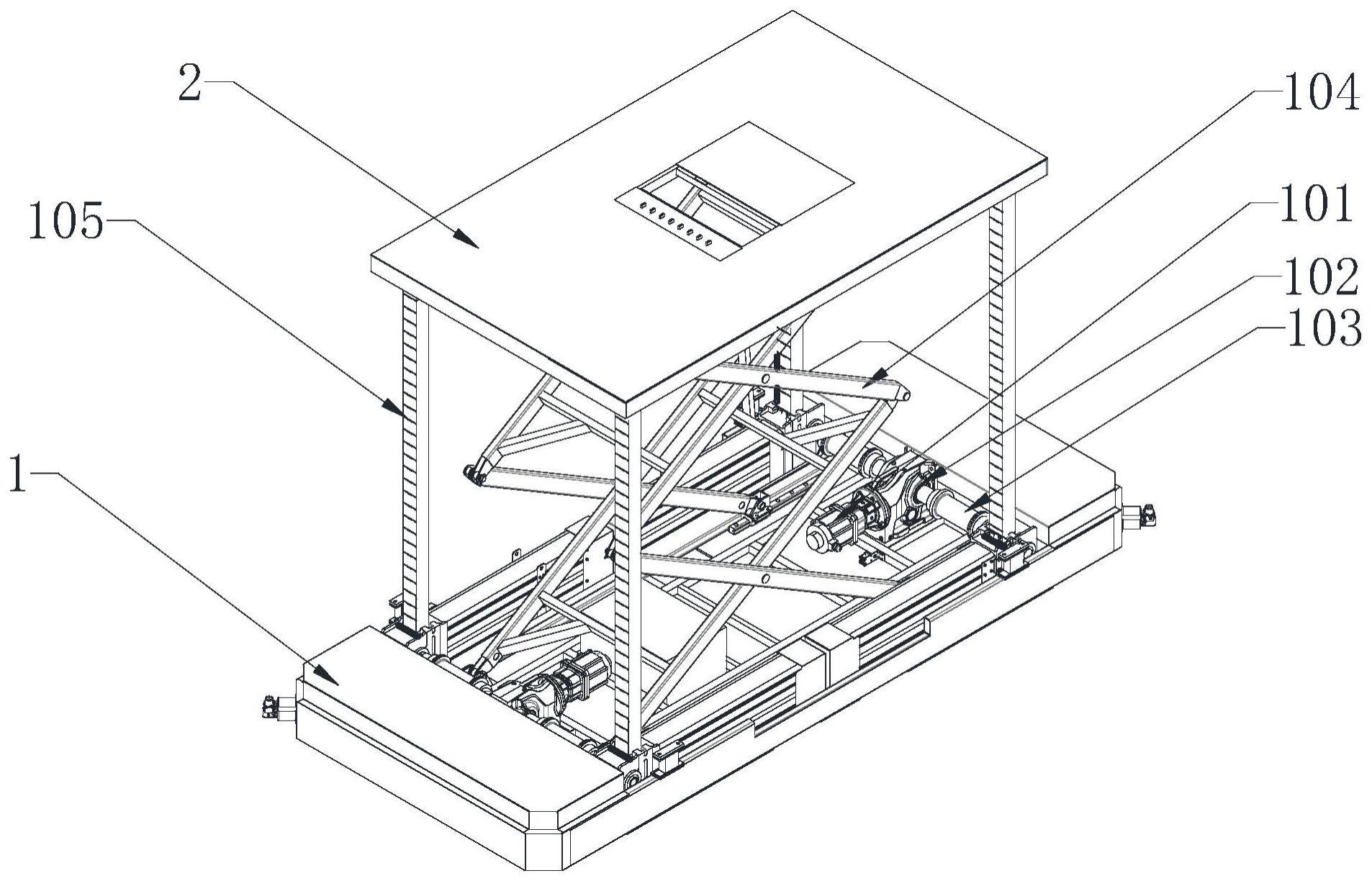
2、本发明解决上述技术问题的技术方案如下:一种agv机器人,包括底座,底座内开设有内腔,内腔的内周壁对称设置有两个低压伺服电机,两个低压伺服电机的输出轴处设置有减速机,低压伺服电机的输出轴端部固定连接有联轴器,联轴器的端部设置有刚性链,底座内设置有剪刀叉稳定机构。
3、本发明的有益效果是:
4、该agv机器人效果更好,本发明中在现有的基础上进行改进,采用两台低压伺服电机驱动,每台压伺服电机通过连接一台减速机、二个联轴器,最终输出至两个双层式销齿举升链(也叫刚性链),实现四个双层式销齿举升链同时且直接输出升降过渡平台,实现升降过渡平台的完全可控可调速度升降,配以剪刀叉稳定机构,稳定平台整体平面度。
5、在上述技术方案的基础上,本发明还可以做如下改进。
6、进一步,所述剪刀叉温度机构的顶部设置有升降过渡平台,升降过渡平台的底部与四个刚性链连接,升降过渡平台的顶部一侧固定连接有支架,支架的顶部固定连接有横板,横板的顶部中间固定连接有小型伺服电机,小型伺服电机的输出轴端部固定连接有丝杆,丝杆的外周壁螺纹连接有套块,套块的两侧对称设置有两个连杆,两个连杆的其中一端与套块铰接相连,横板的两侧固定连接有滑轨,滑轨的外周壁对称设置有两个滑块,两个滑块与两个连杆的另外一端铰接相连。
7、采用上述进一步方案的有益效果是,能够由小型伺服电机间接地改变连杆与滑轨的交叉角度,并使滑块在滑轨上进行滑动,然后以此作为传动去对联动框架进行控制,以便于联动框架进行相应的转动后可将货物转移至平台上,并在此过程中,可通过两个对称的连杆同时工作且呈三角连接的状态,保持支架及其顶部结构的稳定效果。
8、进一步,所述滑轨的端部转动连接有连接轴,连接轴的端部固定连接有联动框架,联动框架的顶部中间转动连接有联动杆,联动杆与其中一个滑块铰接相连,联动框架的底部固定连接有两个t型杆,两个t型杆的外周壁均套装连接有套筒,t型杆的外周壁套装连接有压簧,压簧的两端分别与联动框架的底部及套筒固定连接,套筒的底部转动连接有压辊。
9、进一步,采用上述进一步方案的有益效果是,能够让货物在联动框架由倾斜状态恢复至竖直状态的过程中,能够由压辊对其产生的压力被带动至升降过渡平台上,以此完成转移工作,同理,可让联动框架由竖直状态翻转至倾斜状态以此将货物从升降过渡平台上转移至其它位置,为用户在将货物进行转移的过程中节省体力,同时在货物处于升降过渡平台的顶部时,能够由压簧对套筒及压辊产生的弹力间接地将货物固定在升降过渡平台上,使平台的使用效果更佳。
技术特征:
1.一种agv机器人,其特征在于,包括底座(1),所述底座(1)内开设有内腔,所述内腔的内周壁对称设置有两个低压伺服电机(101),两个所述低压伺服电机(101)的输出轴处设置有减速机(102),所述低压伺服电机(101)的输出轴端部固定连接有联轴器(103),所述联轴器(103)的端部设置有刚性链(105)。
2.根据权利要求1所述的一种agv机器人,其特征在于,所述底座(1)内设置有剪刀叉稳定机构(104)。
3.根据权利要求2所述的一种agv机器人,其特征在于,所述剪刀叉温度机构(104)的顶部设置有升降过渡平台(2),所述升降过渡平台(2)的底部与四个所述刚性链(105)连接。
4.根据权利要求3所述的一种agv机器人,其特征在于,所述升降过渡平台(2)的顶部一侧固定连接有支架(3),所述支架(3)的顶部固定连接有横板(301),所述横板(301)的顶部中间固定连接有小型伺服电机(302)。
5.根据权利要求4所述的一种agv机器人,其特征在于,所述小型伺服电机(302)的输出轴端部固定连接有丝杆(303),所述丝杆(303)的外周壁螺纹连接有套块(304),所述套块(304)的两侧对称设置有两个连杆(306),两个所述连杆(306)的其中一端与所述套块(304)铰接相连。
6.根据权利要求5所述的一种agv机器人,其特征在于,所述横板(301)的两侧固定连接有滑轨(307),所述滑轨(307)的外周壁对称设置有两个滑块(305),两个所述滑块(305)与两个所述连杆(306)的另外一端铰接相连。
7.根据权利要求6所述的一种agv机器人,其特征在于,所述滑轨(307)的端部转动连接有连接轴(4),所述连接轴(4)的端部固定连接有联动框架(401)。
8.根据权利要求7所述的一种agv机器人,其特征在于,所述联动框架(401)的顶部中间转动连接有联动杆(402),所述联动杆(402)与其中一个所述滑块(305)铰接相连。
9.根据权利要求8所述的一种agv机器人,其特征在于,所述联动框架(401)的底部固定连接有两个t型杆(403),两个所述t型杆(403)的外周壁均套装连接有套筒(404),所述t型杆(403)的外周壁套装连接有压簧(405),所述压簧(405)的两端分别与所述联动框架(401)的底部及所述套筒(404)固定连接。
10.根据权利要求9所述的一种agv机器人,其特征在于,所述套筒(404)的底部转动连接有压辊(406)。
技术总结
本发明涉及AGV机器人技术领域,具体为一种AGV机器人。一种AGV机器人,包括底座,底座内开设有内腔,内腔的内周壁对称设置有两个低压伺服电机,两个低压伺服电机的输出轴处设置有减速机,低压伺服电机的输出轴端部固定连接有联轴器,联轴器的端部设置有刚性链,底座内设置有剪刀叉稳定机构,剪刀叉温度机构的顶部设置有升降过渡平台,本发明的有益效果是:该一种AGV机器人,采用两台低压伺服电机驱动,每台压伺服电机通过连接一台减速机、二个联轴器,最终输出至两个双层式销齿举升链(也叫刚性链),实现四个双层式销齿举升链同时且直接输出升降过渡平台,实现升降过渡平台的完全可控可调速度升降,配以剪刀叉稳定机构,稳定平台整体平面度。
技术研发人员:吕响红,吕嘉晟,吕鹏,胡君瑞
受保护的技术使用者:东阳市永美链条有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!