基于2D激光SLAM的龙门吊负载防撞控制方法及装置与流程
本发明涉及激光slam领域,具体涉及一种基于2d激光slam的龙门吊负载防撞控制方法及装置。
背景技术:
1、码头的rtg设备在堆场搬运集装箱操作时,司机需要手动驾驶rtg在堆场内搬运集装箱,完成吊箱工作,并观察周围情况做出制动判断。具体的,龙门吊作业过程中,司机驾驶小车,小车下方设有吊具,该吊具用来吊装集装箱,将集装箱移动并放置在堆场中。小车和吊具作为负载,在移动过程中,需通过司机行驶过程中进行自主判断其与堆场上的集装箱之间的距离,以避免发生碰撞,导致严重事故发生。这种传统判断方式的缺点是容易分散司机的注意力,容易导致司机信息传递不及时而发生事故。另外,司机的视线容易受到其他干扰导致判断失误。因此亟需一种准确及时控制龙门吊负载防撞的方法。
技术实现思路
1、针对上述提到的技术问题。本技术的实施例的目的在于提出了一种基于2d激光slam的龙门吊负载防撞控制方法及装置,来解决以上背景技术部分提到的技术问题。
2、第一方面,本发明提供了一种基于2d激光slam的龙门吊负载防撞控制方法,包括以下步骤:
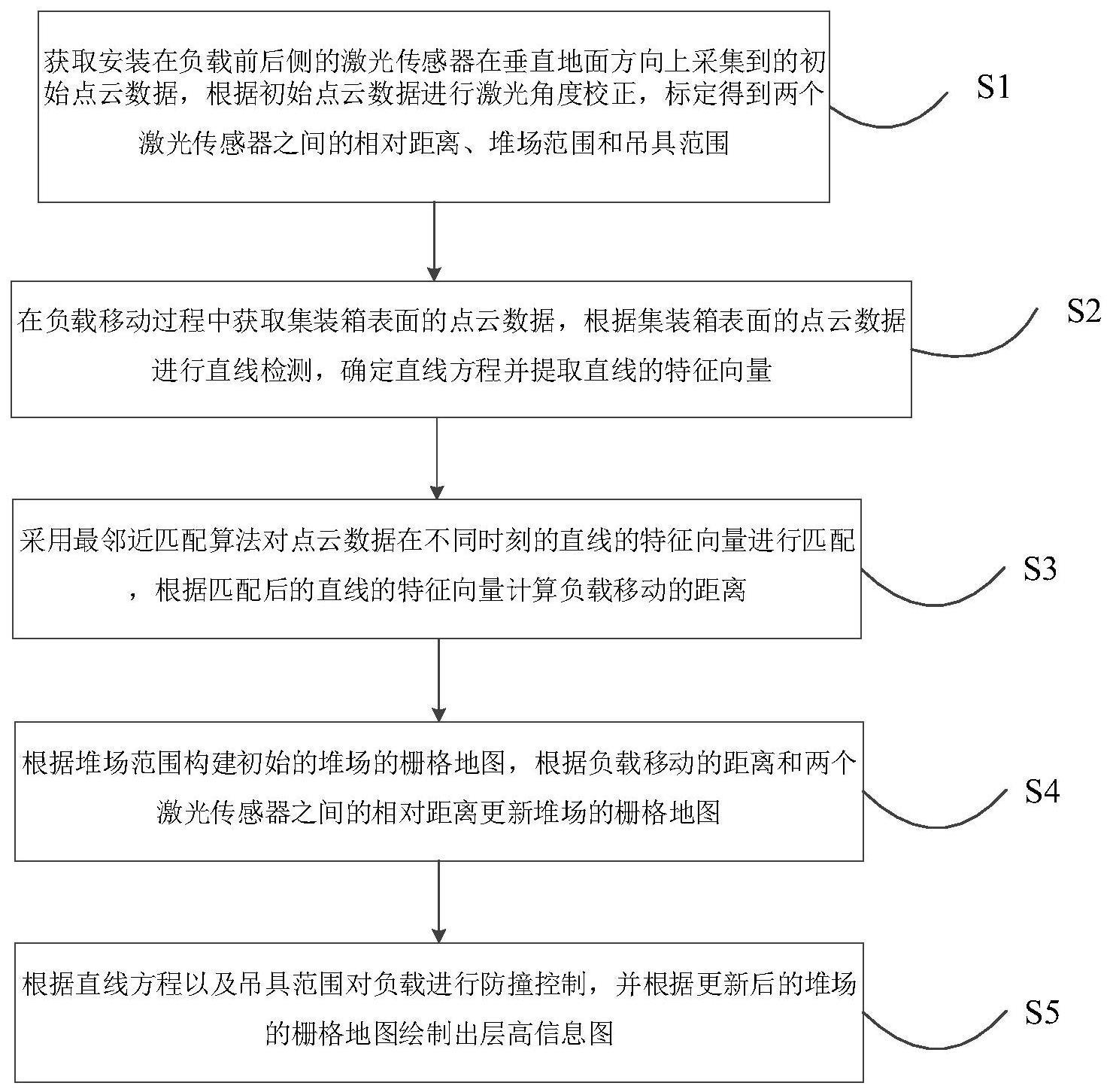
3、获取安装在负载前后侧的激光传感器在垂直地面方向上采集到的初始点云数据,根据初始点云数据进行激光角度校正,标定得到两个激光传感器之间的相对距离、堆场范围和吊具范围;
4、在负载移动过程中获取集装箱表面的点云数据,根据集装箱表面的点云数据进行直线检测,确定直线方程并提取直线的特征向量;
5、采用最邻近匹配算法对点云数据在不同时刻的直线的特征向量进行匹配,根据匹配后的直线的特征向量计算负载移动的距离;
6、根据堆场范围构建初始的堆场的栅格地图,根据负载移动的距离和两个激光传感器之间的相对距离更新堆场的栅格地图;
7、根据直线方程以及吊具范围对负载进行防撞控制,并根据更新后的堆场的栅格地图绘制出层高信息图。
8、作为优选,根据初始点云数据进行激光角度校正,具体包括:
9、根据初始点云数据进行直线检测,确定地面上的直线,利用区域生长法筛选并拟合地面上的直线,得到拟合的直线,根据拟合的直线计算出激光传感器的发出的激光相对于参考坐标系的角度偏差,通过校正角度偏差使激光传感器的发出的激光的角度垂直正对地面。
10、作为优选,标定吊具与集装箱的接触区域和抓取范围,具体包括:
11、当吊具抓取集装箱并将其放置在地面上时,获取集装箱表面的初始点云数据,根据两个时刻采集的集装箱表面的初始点云数据检测集装箱表面的直线特征,根据集装箱表面的直线特征对两个时刻采集的集装箱表面的初始点云数据进行配准,通过分析集装箱表面的点云密度和分布确定吊具与集装箱的接触区域和抓取范围。
12、作为优选,根据集装箱表面的点云数据进行直线检测,确定直线方程并提取直线的特征向量,具体包括:
13、从集装箱表面的点云数据中按顺序选择若干点作为起始点,并且根据起始点的坐标采用最小二乘法构建二元一次的直线方程,通过svd算法求解二元一次的直线方程的初始系数;
14、采用区域生长法将二元一次的直线方程的范围扩展至集装箱表面的点云数据中的其余点;响应于存在重叠的直线,判定重叠区域,根据重叠区域中离直线的距离值判定点的所属直线方程;
15、根据直线方程和直线方程中的点云坐标构造直线的特征向量,直线的特征向量包括直线的角度、直线的端点和中心点。
16、作为优选,采用最邻近匹配算法对点云数据在不同时刻的直线的特征向量进行匹配,根据匹配后的直线的特征向量计算负载移动的距离,具体包括:
17、计算不同时刻的直线的特征向量之间的距离,并选择距离最近的直线的特征向量进行匹配,匹配后的直线的特征向量表示为:
18、matchdesc={(linedesco1,linedescn1),…,(linedescon,linedescnn)};
19、其中,linedescon和linedescnn表示第n组匹配的直线的特征向量;
20、采用下式计算负载移动的距离:
21、
22、作为优选,根据堆场范围构建初始的堆场的栅格地图,根据负载移动的距离和两个激光传感器之间的相对距离更新堆场的栅格地图,具体包括:
23、整个堆场的x轴方向长度为xlen,y轴方向长度为ylen,初始的堆场的栅格地图为mxlen×ylen=0;
24、激光传感器在初始位置采集到的第一帧点云数据为a={(xa1,ya1)...(xan,yan)},接收到第一帧点云数据时堆场的栅格地图为:m[xai-d相对,yai]=1,其中,d相对表示两个激光传感器之间的相对距离;
25、采集到的第二帧点云数据为b={(xb1,yb1)...(xbn,ybn)},根据第一帧点云数据和第二帧点云数据计算出负载移动的距离d,接收到第二帧点云数据时更新堆场的栅格地图为:m[xbi-d,ybi]=1。
26、作为优选,根据直线方程以及吊具范围对负载进行防撞控制,具体包括:
27、根据直线方程确定集装箱表面在堆场的位置以及距离负载的距离,响应于直线方程的端点与吊具范围的距离小于阈值,控制负载减速和停止。
28、第二方面,本发明提供了一种基于2d激光slam的龙门吊负载防撞控制装置,包括:
29、校正标定模块,被配置为获取安装在负载前后侧的激光传感器在垂直地面方向上采集到的初始点云数据,根据初始点云数据进行激光角度校正,标定得到两个激光传感器之间的相对距离、堆场范围和吊具范围;
30、特征提取模块,被配置为在负载移动过程中获取集装箱表面的点云数据,根据集装箱表面的点云数据进行直线检测,确定直线方程并提取直线的特征向量;
31、特征匹配模块,被配置为采用最邻近匹配算法对点云数据在不同时刻的直线的特征向量进行匹配,根据匹配后的直线的特征向量计算负载移动的距离;
32、栅格地图更新模块,被配置为根据堆场范围构建初始的堆场的栅格地图,根据负载移动的距离和两个激光传感器之间的相对距离更新堆场的栅格地图;
33、控制模块,被配置为根据直线方程以及吊具范围对负载进行防撞控制,并根据更新后的堆场的栅格地图绘制出层高信息图。
34、第三方面,本发明提供了一种电子设备,包括一个或多个处理器;存储装置,用于存储一个或多个程序,当一个或多个程序被一个或多个处理器执行,使得一个或多个处理器实现如第一方面中任一实现方式描述的方法。
35、第四方面,本发明提供了一种计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如第一方面中任一实现方式描述的方法。
36、相比于现有技术,本发明具有以下有益效果:
37、(1)本发明通过负载前后两个激光传感器进行激光点云数据的采集与处理,利用直线检测和特征提取进行配准,并基于栅格地图避障决策,从而实现龙门吊在堆场内作业时的负载防撞功能,提高堆场内作业的安全性能,减少司机的工作量,降低作业难度。
38、(2)本发明通过负载移动的距离实时更新栅格地图,根据栅格地图中的信息避障决策,从而使龙门吊能够在堆场内安全作业。
39、(3)本发明不仅具有实时性强、运行停止及时等优点,还具有检测速度快、精度较高,鲁棒性高等优点。
- 还没有人留言评论。精彩留言会获得点赞!