番茄种子机械加工的定量包装设备的制作方法
本发明涉及物料包装机械,具体涉及番茄种子机械加工的定量包装设备。
背景技术:
1、番茄是茄科茄属的一年生草本植物,是全世界栽培最为普遍的果菜之一。番茄含有丰富的胡萝卜素、维生素c和b族维生素,营养价值高,既可作为蔬菜也可作为水果,既可生食也可熟食;番茄可用来加工制作番茄酱、番茄汁和番茄丁等;番茄富含番茄红素,具有很强的抗氧化能力,能降低血压、清热解毒之效,还可提取作为保健品。
2、现有的番茄大规模种植通常采用播种的方式,而在种植过程中,番茄的生长除了会受阳光、土壤等环境因素的影响外,番茄种子的质量也会严重影响其长势。
3、番茄种子为扁平的卵形或肾形,呈灰褐色或黄褐色,种子表面有细茸毛。在现有的生产中,番茄种子是由番茄果实经过去皮、搅碎、发酵、果浆分离、烘干等多道工序后得到的,经过上述工序得到的优质番茄种子再经过包装、运输后流入市场进行销售。
4、不难看出,包装是番茄种子从最初的获得到最终的售卖之间的一道必经工序,包装的品质一定程度上也会销售量造成影响,因此也需格外注重。
5、现有的番茄种子的包装通常采用机械或半机械的方式,半机械的方式中包含了大量的需要人工参与的部分,随着产量的提升和自动化的发展,已逐渐被淘汰,而采用现有的自动化包装设备进行番茄种子的包装时,会频繁出现以下几个问题:
6、1、难以实现番茄种子准确的定量包装。现有的包装方式单次对包装袋进行填料包装的方式,但是受各种因素的影响,无法保证单次番茄种子的填充量完全统一,致使包装成品的种子包装量存在较大误差、规格不一。
7、2、在包装过程中容易发生种子粘连结块,影响包装品质。具体来说,由于番茄种子的包装过程并非在完全真空的环境下进行的,受空气湿度等环境因素的影响,在包装过程中,番茄种子之间极易发生粘结,粘结的种子块一方面会影响定量包装准确度,另一方面种子块造成的包装袋凸起也不便于后续的运输和销售。
8、3、包装过程的连续性和自动化程度低。具体来说,目前常用的种子包装袋有两种,分别为个体包装袋和连体包装袋,个体包装袋在使用过程中具有以下特征:个体包装袋只有上端一个开口,在填充完毕后也只需要对上端开口进行封装,但是个体包装袋只能单个使用,每次装填完成后都需要进行重复的包装袋更换、夹持以及撑口操作,且封装也需要单独地进行,整体的包装过程繁琐、效率较低;连体包装袋为一条很长的筒形袋,在包装过程中,是选取其中的各个小段作为包装区,并且在物料填充完毕后需要对包装区的两端同时进行封装,而后还需要将其切割成一个个小型包装袋,不难看出,使用个体包装袋作为载体盛放种子时,需要大量的人工参与,且包装袋的更换、夹持以及撑口等必要操作无法简化,导致番茄种子包装时的自动化程度和效率大大降低;而采用连体袋作为包装载体时,现有设备的局限性又容易出现单节包装袋的使用长度不一造成包装成品的大小差异,以及连续性地封装、裁切、输送难以实现的问题,另外,在进行番茄种子的填充、包装袋的封口以及切断的过程中,还会出现包装袋位移的问题。
9、综上可知,现有技术在实际使用上显然存在不便与缺陷,所以有必要加以改进。
技术实现思路
1、针对现有技术中的缺陷,本发明提供番茄种子机械加工的定量包装设备,用以解决传统技术中的设备在用于番茄种子包装的过程中,存在的填充量不一、种子易结块以及包装的连续性和自动化程度低的问题。
2、为实现上述目的,本发明提供如下技术方案:
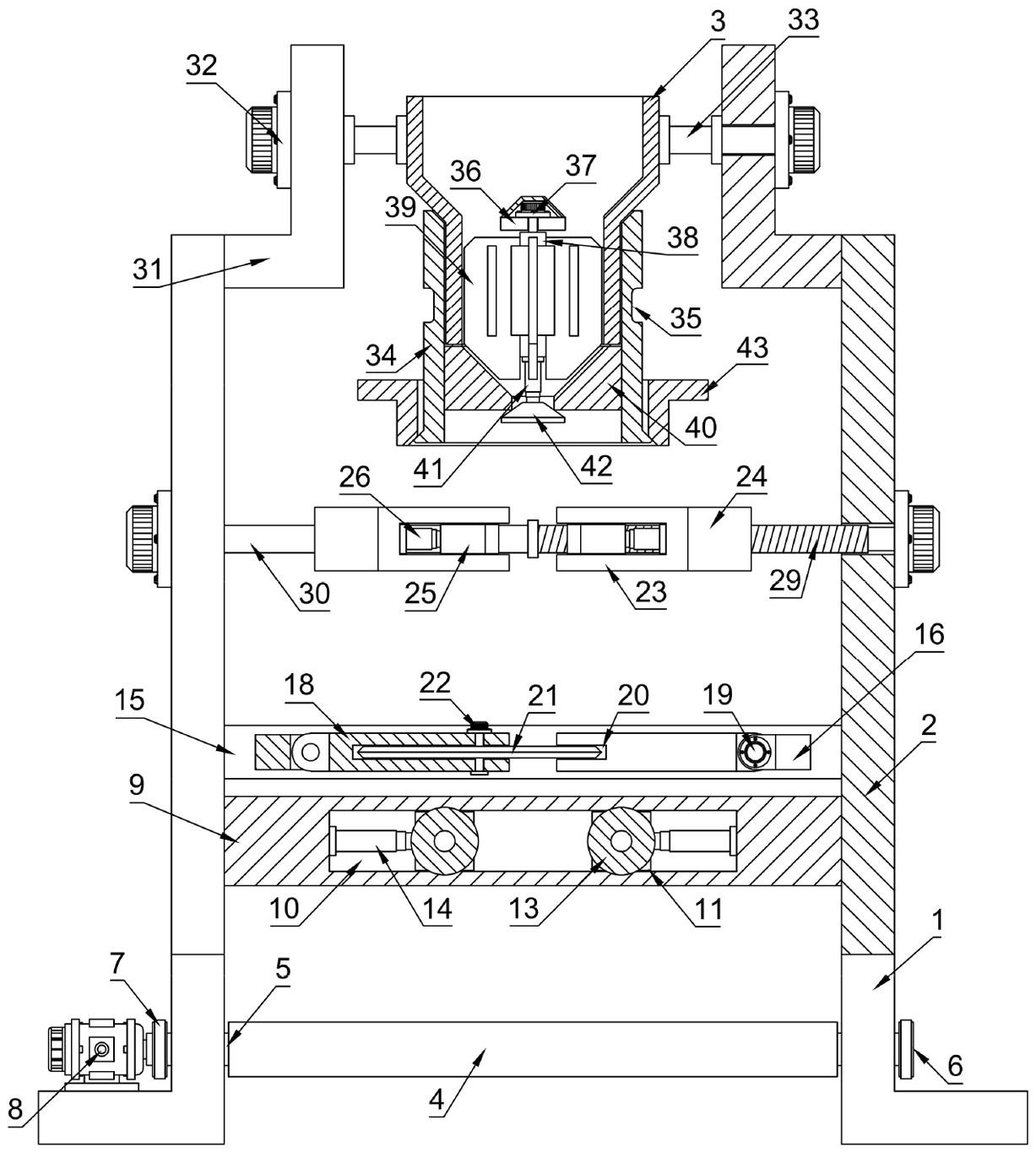
3、番茄种子机械加工的定量包装设备,包括横向对称设置的两个直角底座,每个所述直角底座的上端面分别固接有安装竖板,两个所述直角底座之间设有成品输送机构,两块所述安装竖板之间自上而下依次设有进料斗、包装袋定位机构、热封口机构、裁切机构以及滚动夹紧机构。
4、作为一种优化的方案,所述进料斗靠近下端的周壁上固定套设有竖向的支撑套筒,所述支撑套筒的下端周向边缘呈°角向外凸出,所述支撑套筒靠近上部的周壁上开设有环形的包装袋装夹口。
5、作为一种优化的方案,所述包装袋定位机构包括竖向设置的定位套筒,所述定位套筒升降套设在所述支撑套筒的外侧,所述定位套筒下端开口处的内周壁向外呈°角渐扩式设置。
6、作为一种优化的方案,所述热封口机构包括两个对称设置的封口座,所述封口座为横向开口的u形座,每个所述封口座开口内分别伸缩设有封口电热板,每个所述封口座的横向外端面上分别固接有滑动驱动块,两个所述滑动驱动块之间设有两组旋转对称的滑动驱动组件。
7、作为一种优化的方案,每组所述滑动驱动组件包括固接于所述安装竖板的外侧壁上的滑动驱动电机,所述滑动驱动电机的输出轴末端固接有水平的驱动螺纹杆,所述驱动螺纹杆延伸至两个所述封口座中间的位置,所述驱动螺纹杆的末端固接有水平的支撑滑杆,所述支撑滑杆的末端转动安装在所述安装竖板的内侧壁上。
8、作为一种优化的方案,所述驱动螺纹杆横向穿过并螺纹连接于首个所述滑动驱动块,同轴固接在所述驱动螺纹杆末端的所述支撑滑杆则横向穿过第二个所述滑动驱动块,所述驱动螺纹杆对所述滑动驱动块的滑动进行驱动,所述支撑滑杆则对所述滑动驱动块的滑动进行支撑及限位。
9、作为一种优化的方案,所述裁切机构包括横向设置的安装侧板,所述安装侧板对称设有两块,每块所述安装侧板的两端分别固接在两块所述安装竖板的相对内壁上。
10、作为一种优化的方案,两块所述安装侧板之间固接安装有两根水平的支撑柱,每根所述支撑柱的侧端面上分别固接有两个对称的铰接座,两个对称的所述铰接座之间摆动设有裁切座,每个所述铰接座的侧端面上分别固接有摆动驱动电机,每个所述摆动驱动电机的输出轴末端分别穿过所述铰接座并固接至所述裁切座靠近末端的侧端面。
11、作为一种优化的方案,每个所述裁切座上分别开设有切割口,所述切割口内转动设有转动切割刀。
12、作为一种优化的方案,所述裁切机构还包括裁切驱动电机,所述裁切驱动电机固接在其中一个所述裁切座的上表面,所述裁切驱动电机的输出轴末端向下穿过所述裁切座并固接至所述转动切割刀的上端。
13、作为一种优化的方案,所述成品输送机构包括若干个输送辊,若干个所述输送辊并列安装在两个所述直角底座之间,每个所述输送辊的相对端面上分别固接有传动轴,所述传动轴的末端横向穿过所述直角底座并固接有传动轮,相邻两个所述传动轮之间套设有传动带。
14、作为一种优化的方案,所述成品输送机构还包括输送驱动电机,所述输送驱动电机固定安装在其中一个所述直角底座的上端面上,所述输送驱动电机的输出轴与最末端的一根所述传动轴相固接。
15、作为一种优化的方案,所述滚动夹紧机构包括两块对称设置的夹紧安装板,每块所述夹紧安装板的两端分别固接在两块所述安装竖板的相对内壁上,每块所述夹紧安装板的中部分别开设有水平的滑动限位口,所述滑动限位口滑动设有两个方形的滑动安装座,每个所述滑动安装座的外侧壁上分别固接有转动驱动电机,纵向相对的两个所述滑动安装座之间设有转动夹持辊,所述转动驱动电机的输出轴末端穿过所述滑动安装座并固接至所述转动夹持辊的侧端面中心处。
16、作为一种优化的方案,所述滑动限位口的相对内壁上分别固接有对称的两个水平伸缩缸,所述水平伸缩缸的伸缩末端固接至对应的所述滑动安装座的侧端面。
17、作为一种优化的方案,所述封口座的内侧壁上对应每块所述封口电热板分别固接有两个水平的电控伸缩缸,所述电控伸缩缸的伸缩端固接至所述封口电热板的背面,所述封口座的内侧壁上还固接有对所述封口电热板进行供电的供电块。
18、作为一种优化的方案,每块所述安装竖板靠近上端的内侧壁上分别固接有直角连接座,每个所述直角连接座的外侧壁上分别固接有翻转驱动电机,所述翻转驱动电机的输出轴末端穿过所述直角连接座并固接有水平的连接轴,所述连接轴的末端固接至所述进料斗的横向侧壁。
19、作为一种优化的方案,所述进料斗内设有匀料搅拌机构,所述匀料搅拌机构包括水平设置的安装桥板,所述安装桥板的两端固接在所述进料斗的内周壁上,所述安装桥板的上表面固接有搅拌驱动电机,所述搅拌驱动电机的输出轴末端向下穿过所述安装桥板并固接有竖向的搅拌立柱,所述搅拌立柱的周壁上固接有若干块中心对称的搅拌扇叶。
20、作为一种优化的方案,所述支撑套筒的内周壁上固接有圆柱形的定量出料座,所述定量出料座的上端面呈内锥形开口设置。
21、作为一种优化的方案,所述搅拌立柱的下端面上固接有竖向的升降伸缩缸,所述升降伸缩缸的下部伸缩端固接有倒锥形的封口块,所述封口块可通过伸缩控制所述定量出料座下端开口的关闭和连通。
22、作为一种优化的方案,所述进料斗的靠近上端的纵向侧壁上固接有水平的延伸板,每块所述延伸板的下表面分别固接有竖向的定位伸缩缸,所述定位伸缩缸的下部伸缩端固接至所述定位套筒的上端面。
23、与现有技术相比,本发明的有益效果是:
24、本发明中是采用连体袋作为番茄种子包装的载体的,并根据连体包装袋的使用特点,分别设置了对应的包装袋定位机构、热封口机构、裁切机构、滚动夹紧机构以及成品输送机构,各个机构之间相互协调,使得对于连体包装袋的定位夹持、热封口以及裁切、输送等一系列操作都能够连续、自动化进行。
25、本发明中对于番茄种子的定量填充是通过定量出料座与封口块的伸缩配合来实现的,而设置于进料斗内的匀料搅拌机构则可以对加入到进料斗中的番茄种子进行搅拌翻动,一方面可以避免种子粘结成块,另一方面通过搅拌可使得出料更加流畅均匀,一定程度上也保证了定量填充的顺利进行。
26、本发明中设置的包装袋定位机构可通过支撑套筒与定位套筒的升降对接来实现连体包装袋松开与夹持之间的转换;具体来说,受到种子重力的作用,在不夹持的状态下,连体包装袋会自由下落,这也是番茄种子能够实现自动化连续包装的必要前提,然而当需要对完成填充的部分进行封口、裁切等加工时,则需要将包装袋夹紧,避免因其移动而造成的加工误差,而当上述封口、裁切加工完成时,则需要继续利用重力来实现加工部位的更替,这就要求对于包装袋的夹持是一个可转换的过程,而本发明中设置的包装袋定位机构则可实现上述的动态夹持的效果。
27、本发明中设置的热封口机构可实现对于连体包装袋的封边封口加工,具体地,在封口加工过程中,首先通过驱动螺纹杆的转动驱动两个封口座滑动对接,将包装袋待封口部分的两侧夹紧,然后封口电热板再分别伸出,从两侧对包装袋进行封口处理,极大程度上保证了封口位置的准确性,从而使得封口、裁切完毕后的单个包装袋大小一致。
28、本发明中设置的裁切机构可对由封口得到的若干个连续的小包装袋进行裁断切割,使其成为独立的个体,而摆动设置的裁切座也能够在包装袋向下进给的过程中对其进行规避;同时本发明中设置的滚动夹紧机构可在切割过程中对即将掉落的包装袋进行夹紧支撑,避免因重力造成的包装袋拉伸撕裂的问题,裁切完毕成品包装袋掉落至成品输送机构被运走。
- 还没有人留言评论。精彩留言会获得点赞!