机器人联锁电梯控制系统的制作方法
本发明涉及一种用于有效控制与在建筑物中的楼层之间移动的机器人相关联地操作的电梯的机器人联锁电梯控制系统。
背景技术:
1、在针对住宅、商务和商业目的构造的各种建筑物中,安装电梯以使乘客在建筑物中的楼层之间平稳移动。典型地,电梯包含在建筑物内沿着竖直方向上形成的井道移动的电梯轿厢、包含用于产生用于提升电梯轿厢和起重机或使电梯轿厢和起重机下降的动力的马达的机械部件、控制电梯操作的控制器等。
2、随着建筑物中机器人服务的最近激活,越来越需要使用电梯在建筑物中的楼层之间移动机器人。举例来说,已开发各种机器人以在建筑物内移动的同时执行各种任务,例如运输、清洁和客户引导。
3、建筑物中的商务可能需要机器人在楼层之间移动。电梯被认为是机器人在楼层之间移动的最理想的方式,且正在开发机器人与电梯系统之间的各种联锁控制技术以实现机器人到目的地楼层的有效移动。
4、近年来,随着机器人市场的快速发展,各种服务区域被机器人替换。特别地,在客户服务建筑(例如旅馆和居所)中使用机器人的无人服务的趋势正在快速发展。为了扩展使用机器人的无人服务的功能,由于需要机器人在建筑物中的竖直移动(从一楼层到另一楼层的移动),因此机器人与电梯系统之间的联锁已变得不可或缺。
5、另一方面,机器人使用电梯会给普通乘客(人类)带来不便。出于安全原因或技术限制,机器人可能比普通乘客花费更长的时间登上或离开电梯轿厢。举例来说,当机器人在某一楼层的平台处等待电梯服务时,与机器人在同一出发楼层的普通乘客会经历由机器人引起的登梯延迟。在另一实例中,与同一电梯轿厢中的机器人具有相同目的地楼层的普通乘客会经历由机器人引起的下梯延迟。
6、由于机器人登上或离开电梯花费较长时间,因此会延迟电梯的驱动,导致在其它楼层平台处等待对应电梯的普通乘客的等待时间增加。出于相同原因,与同一电梯中的机器人具有不同目的地楼层的普通乘客会延迟到达目的地楼层。如果机器人在平台处或在电梯内发生故障,或者如果机器人与普通乘客之间发生碰撞,那么上文所描述的服务延迟问题会变得更加严重。
7、为了解决上述问题,根据对应电梯的目的或操作特性,安装在建筑物中的多个电梯中的每一者的操作模式可划分成机器人专用模式、乘客专用模式、机器人和普通乘客同时使用对应电梯的共享模式等。
8、设置为机器人专用模式的电梯允许仅对机器人的呼叫服务,设置为乘客专用模式的电梯允许仅对普通乘客(人类)的呼叫服务,且设置为共享模式的电梯允许对机器人和普通乘客的呼叫服务。
9、此处,由于设置为不同操作模式的电梯由不同主体使用,因此期望也根据操作模式将不同操作特性应用于电梯。另一方面,在不考虑操作模式的通用标准的应用中,难以在电梯的控制和操作中根据操作模式反映不同操作特性,从而导致在各种情形下电梯操作的中断及电梯的有效操作的障碍。
技术实现思路
1、本发明已被构想来解决本领域中的此类问题,且本发明的一个目标是通过提供详细的操作方法,不仅为普通乘客而且为在建筑物中使用机器人服务的客户提供更方便且舒适的服务,所述操作方法可解决包含与机器人相关联地操作的电梯系统的机器人专用模式、乘客专用模式和共享模式的操作模式中的每一者的缺点。
2、本发明的另一目标是提供一种响应于对安装在建筑物中的多个电梯中的一些电梯的机器人专用模式设置请求而考虑到建筑物中的流量来将有效电梯线路指定为机器人专用电梯线路的方法。
3、本发明的另一目标是提供一种用于在安装在建筑物中且在分类成机器人专用模式、乘客专用模式和共享模式的各种操作模式中操作的电梯线路中的每一者的操作中,在减少机器人与普通乘客之间的相遇且抑制服务延迟的同时响应于对某一电梯线路的操作模式切换请求而有效地切换操作模式的方法。
4、本发明的又另一目标是提供一种通过将共享模式分类成子模式且在子模式中的每一者中区分机器人与普通乘客的状态,甚至在电梯可同时供机器人和普通乘客使用的共享模式中减少机器人与普通乘客之间的相遇的方法。
5、另一方面,当数个机器人登上设置为机器人专用模式的电梯线路的单个电梯轿厢时,在平台处或在电梯轿厢内可能发生事故,例如普通乘客与机器人之间的碰撞或机器人之间的碰撞。另外,比普通乘客的登梯/下梯时间更长的机器人的登梯/下梯时间会通过增加普通乘客的平台等待时间和电梯登梯时间而导致服务延迟,由此由于建筑物中电梯流量处理效率的降低而增加乘客不便。
6、本发明的又另一目标是提供一种设置与机器人相对于电梯线路登梯相关的参数(满率、可服务机器人的最大数目等)的方法,所述电梯线路被设置为允许机器人登梯以便使用建筑物中提供的机器人服务将更方便及舒适的服务提供到普通乘客和其它乘客,同时提高与机器人相关联地操作的电梯系统的总体操作效率。
7、应理解,本发明不限于上述目标,且从实施例的详细描述中,本发明的其它目标对于本领域的技术人员将变得显而易见。
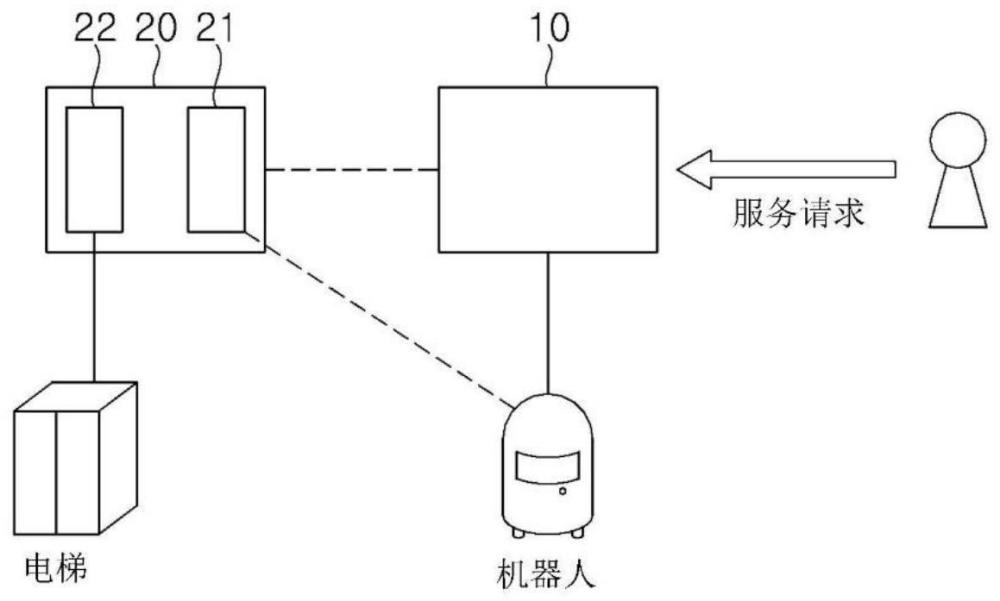
8、根据本发明的一个方面,提供一种机器人联锁电梯控制系统,包含:多个电梯,与在建筑物中自主移动的机器人相关联地操作;以及电梯系统,控制安装在建筑物中的电梯的操作,其中多个电梯中的每一者沿着其电梯线路在允许机器人专用使用的机器人专用模式、防止机器人登上电梯的乘客专用模式以及允许机器人和普通乘客同时登梯的共享模式当中的任何一种操作模式中操作,且电梯系统包含相对于多个电梯执行群组管理的群组管理单元,群组管理单元在将多个电梯当中的至少一个电梯线路设置为机器人专用模式时参考预先登记到多个电梯的电梯线路中的每一者的呼叫信息来计算流量评估指数以基于流量评估指数将具有最低流量的电梯线路设置为机器人专用模式,且响应于对切换电梯线路的操作模式的请求而考虑到机器人与人类之间的相遇概率来延迟切换操作模式或立即切换操作模式。
9、流量评估指数可包含关于平均等待时间的信息和关于最大等待时间的信息,所述平均等待时间指示从某一时间点直到完成对预先登记到电梯线路中的每一者的呼叫请求中的每一者的服务的所估计流逝时间的平均值,所述最大等待时间指示从某一时间点直到完成对预先登记到电梯线路中的每一者的所有呼叫请求的服务的所估计流逝时间。
10、群组管理单元可基于平均等待时间和最大等待时间推断最终评估值作为分数,且可将具有最低最终评估值的电梯线路设置为机器人专用模式。
11、相对于多个电梯当中设置为机器人专用模式的电梯线路,群组管理单元可将对应电梯线路设置为一旦对应电梯线路被设置为机器人专用模式就指派给机器人呼叫,或可将对应电梯线路设置为从完成对预先登记到对应电梯线路的普通乘客的呼叫请求的服务的时间点开始指派给机器人呼叫。
12、当对应电梯线路被设置为一旦对应电梯线路被设置为机器人专用模式就允许指派给机器人呼叫时,群组管理单元可取消预先登记到对应电梯线路的普通乘客的呼叫请求,且可响应于普通乘客的呼叫请求而重新指派另一电梯线路的电梯。
13、群组管理单元可响应于从另一操作模式切换到共享模式的请求而立即切换对应电梯线路的操作模式,可响应于从另一模式切换到机器人专用模式的请求而延迟切换对应电梯线路的操作模式,直到完成对预先登记到对应电梯线路的不包含机器人的普通乘客的呼叫的服务,且可响应于从另一操作模式切换到乘客专用模式的请求而延迟切换对应电梯线路的操作模式,直到完成对预先登记到对应电梯线路的机器人的呼叫的服务。
14、群组管理单元可响应于从另一模式切换到共享模式的请求而立即将对应电梯线路设置为指派给机器人和普通乘客的所有呼叫请求。
15、群组管理单元可响应于从另一模式切换到机器人专用模式的请求而在完成对预先登记到对应电梯线路的普通乘客的呼叫的所有服务之后将对应电梯线路设置为仅指派给机器人的呼叫请求。
16、群组管理单元可响应于从另一模式切换到机器人专用模式的请求而不包含相对于普通乘客的新呼叫的对应电梯线路的指派。
17、群组管理单元可响应于从另一模式切换到乘客专用模式的请求而在完成对预先登记到对应电梯线路的机器人的呼叫请求的所有服务之后将对应电梯线路设置为仅指派给普通乘客的呼叫。
18、群组管理单元可响应于从另一模式切换到乘客专用模式的请求而不包含相对于机器人的新呼叫的对应电梯的指派。
19、共享模式可划分成:一般共享模式,其中机器人和人类相对于来自机器人的呼叫和来自人类的呼叫而被视为等效对象;机器人主导共享模式,其中通过将指派抑制权重应用于来自普通乘客的呼叫而将优先级给予来自机器人的呼叫;以及乘客主导共享模式,其中通过将指派抑制权重应用于来自机器人的呼叫而将优先级给予来自人类的呼叫。
20、当设置为一般共享模式的电梯线路被指派给机器人呼叫时,群组管理单元可将对应电梯线路的操作模式暂时切换到机器人主导共享模式。
21、群组管理单元可在由自动切换到机器人主导共享模式的电梯线路完成对机器人呼叫的服务时将对应电梯线路的操作模式返回到一般共享模式。
22、当设置为一般共享模式的电梯线路被指派给人类呼叫时,群组管理单元可将对应电梯线路的操作模式暂时切换到乘客主导共享模式。
23、群组管理单元可在由自动切换到乘客主导共享模式的电梯线路完成对人类呼叫的服务时将对应电梯线路返回到一般共享模式。
24、因而,对于在包含机器人专用模式、乘客专用模式和共享模式的各种操作模式中操作的电梯系统,本发明提供一种可克服操作模式中的每一者的缺点的操作方法,由此不仅为普通乘客而且为使用建筑物中的机器人服务的客户提供更方便且舒适的服务。因此,本发明提高互连到机器人的电梯系统的总体操作效率。
25、另外,对于在包含机器人专用模式、乘客专用模式和共享模式的各种操作模式中操作的电梯系统,本发明提出一种通过为机器人和人类设置不同的满率、限制被设置为允许机器人使用的电梯线路可服务的机器人的最大数目等来设置与机器人的电梯登梯相关的参数的方法。
26、根据本发明,可能减少由机器人与普通乘客之间或机器人之间的碰撞引起的服务延迟,且不仅为普通乘客而且为使用机器人服务的客户提供更方便且舒适的服务。因此,本发明可实现机器人互连电梯控制系统的总体操作效率的显著提高。
27、本发明不限于此,且本发明的其它效果将从以下描述变得显而易见。
- 还没有人留言评论。精彩留言会获得点赞!