悬臂起重机的安全智能监管系统及其方法与流程
本公开涉及智能监管领域,且更为具体地,涉及一种悬臂起重机的安全智能监管系统及其方法。
背景技术:
1、悬臂起重机是一种常见的工业设备,用于在建筑工地、港口和物流中心等场所进行货物的起卸和搬运工作。然而,由于悬臂起重机在操作过程中会因承载重量大、工作环境复杂等因素的影响,存在一定的安全风险。为了确保悬臂起重机的安全运行,对于悬臂起重机进行安全监管至关重要。
2、然而,传统的悬臂起重机的监管方法主要依赖于操作员的经验和人工周期性或定期性的巡检,容易受到主观因素的影响,产生误差或疏忽。同时,人工周期或定期巡检的方式需要耗费大量时间和人力资源,也无法实时获取悬臂起重机的运行状态信息。这意味着如果在巡检之间发生异常情况,监管系统无法及时察觉和采取措施,增加了事故发生的风险。此外,由于悬臂起重机常常在复杂的工作环境中操作,如高空、狭小空间或恶劣天气条件下。传统的监管方法在应对这些复杂环境和多变工况时存在一定的局限性,无法提供准确的安全评估和控制。
3、因此,期望一种优化的悬臂起重机的安全智能监管方案。
技术实现思路
1、有鉴于此,本公开提出了一种悬臂起重机的安全智能监管系统及其方法,其可以基于悬臂起重机的运行参数变化情况自动对该悬臂起重机的运行状态进行实时监测和评估,并在发现异常或危险情况时,发出警报和指令以控制所述悬臂起重机停止或调整。
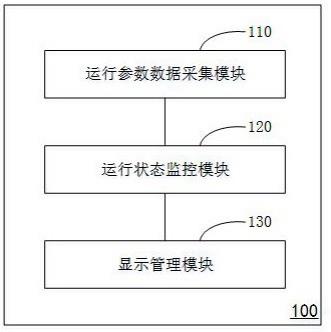
2、根据本公开的一方面,提供了一种悬臂起重机的安全智能监管系统,其包括:运行参数数据采集模块,用于采集悬臂起重机的运行参数,其中,所述运行参数为速度和载荷;运行状态监控模块,用于基于所述运行参数对所述悬臂起重机的运行状态进行监测和评估,并在发现异常或危险情况时,发出警报和指令以控制所述悬臂起重机停止或调整;以及显示管理模块,用于在屏幕上显示所述悬臂起重机的运行状态和安全评级信息,并提供相应的操作和管理功能。
3、在上述悬臂起重机的安全智能监管系统中,所述运行状态监控模块,包括:数据采集单元,用于通过传感器网络采集被监控悬臂起重机在预定时间段内多个预定时间点的速度值和载荷值;运行参数数据时序特征交互单元,用于对所述多个预定时间点的速度值和载荷值进行时序协同关联分析以得到运行速度-载荷时序交互特征;以及运行状态检测单元,用于基于所述运行速度-载荷时序交互特征,确定被监控悬臂起重机的运行状态是否正常。
4、在上述悬臂起重机的安全智能监管系统中,所述运行参数数据时序特征交互单元,包括:数据时序排列子单元,用于将所述多个预定时间点的速度值和载荷值分别按照时间维度排列为运行速度时序输入向量和运行载荷时序输入向量;数据时序特征提取子单元,用于将所述运行速度时序输入向量和所述运行载荷时序输入向量分别通过基于一维卷积层的时序特征提取器以得到运行速度时序特征向量和运行载荷时序特征向量;以及运行参数时序特征交互子单元,用于对所述运行速度时序特征向量和所述运行载荷时序特征向量进行特征交互以得到所述运行速度-载荷时序交互特征。
5、在上述悬臂起重机的安全智能监管系统中,所述运行参数时序特征交互子单元,用于:使用特征间注意力层来对所述运行速度时序特征向量和所述运行载荷时序特征向量进行基于注意力机制的特征交互以得到运行速度-载荷时序交互特征向量作为所述运行速度-载荷时序交互特征。
6、在上述悬臂起重机的安全智能监管系统中,所述运行状态检测单元,包括:交互特征优化子单元,用于对所述运行速度-载荷时序交互特征向量进行特征分布优化以得到优化运行速度-载荷时序交互特征向量;以及运行状态分类判断子单元,用于将所述优化运行速度-载荷时序交互特征向量通过分类器以得到分类结果,所述分类结果用于表示被监控悬臂起重机的运行状态是否正常。
7、在上述悬臂起重机的安全智能监管系统中,所述交互特征优化子单元,包括:密集点分布采样融合二级子单元,用于对所述运行速度时序特征向量和所述运行载荷时序特征向量进行齐次吉尔伯特空间度量式密集点分布采样融合以得到融合特征向量;以及特征融合优化二级子单元,用于将所述融合特征向量和所述运行速度-载荷时序交互特征向量进行融合以得到所述优化运行速度-载荷时序交互特征向量。
8、在上述悬臂起重机的安全智能监管系统中,所述密集点分布采样融合二级子单元,用于:以如下融合优化公式对所述运行速度时序特征向量和所述运行载荷时序特征向量进行齐次吉尔伯特空间度量式密集点分布采样融合以得到所述融合特征向量;其中,所述融合优化公式为:其中,是所述运行速度时序特征向量,是所述运行载荷时序特征向量,表示所述运行载荷时序特征向量的转置向量,表示闵式距离,且为超参数,和分别是所述运行速度时序特征向量和所述运行载荷时序特征向量的全局特征均值,且特征向量和均为行向量,为按位置点乘,为按位置加法,是所述融合特征向量。
9、在上述悬臂起重机的安全智能监管系统中,所述运行状态分类判断子单元,用于:使用所述分类器的全连接层对所述优化运行速度-载荷时序交互特征向量进行全连接编码以得到编码分类特征向量;以及将所述编码分类特征向量输入所述分类器的softmax分类函数以得到所述分类结果。
10、根据本公开的另一方面,提供了一种悬臂起重机的安全智能监管方法,其包括:采集悬臂起重机的运行参数,其中,所述运行参数为速度和载荷;基于所述运行参数对所述悬臂起重机的运行状态进行监测和评估,并在发现异常或危险情况时,发出警报和指令以控制所述悬臂起重机停止或调整;以及在屏幕上显示所述悬臂起重机的运行状态和安全评级信息,并提供相应的操作和管理功能。
11、在上述悬臂起重机的安全智能监管方法中,基于所述运行参数对所述悬臂起重机的运行状态进行监测和评估,并在发现异常或危险情况时,发出警报和指令以控制所述悬臂起重机停止或调整,包括:通过传感器网络采集被监控悬臂起重机在预定时间段内多个预定时间点的速度值和载荷值;对所述多个预定时间点的速度值和载荷值进行时序协同关联分析以得到运行速度-载荷时序交互特征;以及基于所述运行速度-载荷时序交互特征,确定被监控悬臂起重机的运行状态是否正常。
12、根据本公开的实施例,其首先采集悬臂起重机的运行参数,其中,所述运行参数为速度和载荷,接着,基于所述运行参数对所述悬臂起重机的运行状态进行监测和评估,并在发现异常或危险情况时,发出警报和指令以控制所述悬臂起重机停止或调整,然后,在屏幕上显示所述悬臂起重机的运行状态和安全评级信息,并提供相应的操作和管理功能。这样,可以避免人工周期或定期巡检带来的低效率以及低精准度和及时性差的问题,从而提高监管效果,减少事故风险,并提高工作效率。
13、根据下面参考附图对示例性实施例的详细说明,本公开的其它特征及方面将变得清楚。
技术特征:
1.一种悬臂起重机的安全智能监管系统,其特征在于,包括:运行参数数据采集模块,用于采集悬臂起重机的运行参数,其中,所述运行参数为速度和载荷;运行状态监控模块,用于基于所述运行参数对所述悬臂起重机的运行状态进行监测和评估,并在发现异常或危险情况时,发出警报和指令以控制所述悬臂起重机停止或调整;以及显示管理模块,用于在屏幕上显示所述悬臂起重机的运行状态和安全评级信息,并提供相应的操作和管理功能;其中,所述运行状态监控模块,包括:数据采集单元,用于通过传感器网络采集被监控悬臂起重机在预定时间段内多个预定时间点的速度值和载荷值;运行参数数据时序特征交互单元,用于对所述多个预定时间点的速度值和载荷值进行时序协同关联分析以得到运行速度-载荷时序交互特征;以及运行状态检测单元,用于基于所述运行速度-载荷时序交互特征,确定被监控悬臂起重机的运行状态是否正常。
2.根据权利要求1所述的悬臂起重机的安全智能监管系统,其特征在于,所述运行参数数据时序特征交互单元,包括:数据时序排列子单元,用于将所述多个预定时间点的速度值和载荷值分别按照时间维度排列为运行速度时序输入向量和运行载荷时序输入向量;数据时序特征提取子单元,用于将所述运行速度时序输入向量和所述运行载荷时序输入向量分别通过基于一维卷积层的时序特征提取器以得到运行速度时序特征向量和运行载荷时序特征向量;以及运行参数时序特征交互子单元,用于对所述运行速度时序特征向量和所述运行载荷时序特征向量进行特征交互以得到所述运行速度-载荷时序交互特征。
3.根据权利要求2所述的悬臂起重机的安全智能监管系统,其特征在于,所述运行参数时序特征交互子单元,用于:使用特征间注意力层来对所述运行速度时序特征向量和所述运行载荷时序特征向量进行基于注意力机制的特征交互以得到运行速度-载荷时序交互特征向量作为所述运行速度-载荷时序交互特征。
4.根据权利要求3所述的悬臂起重机的安全智能监管系统,其特征在于,所述运行状态检测单元,包括:交互特征优化子单元,用于对所述运行速度-载荷时序交互特征向量进行特征分布优化以得到优化运行速度-载荷时序交互特征向量;以及运行状态分类判断子单元,用于将所述优化运行速度-载荷时序交互特征向量通过分类器以得到分类结果,所述分类结果用于表示被监控悬臂起重机的运行状态是否正常。
5.根据权利要求4所述的悬臂起重机的安全智能监管系统,其特征在于,所述交互特征优化子单元,包括:密集点分布采样融合二级子单元,用于对所述运行速度时序特征向量和所述运行载荷时序特征向量进行齐次吉尔伯特空间度量式密集点分布采样融合以得到融合特征向量;以及特征融合优化二级子单元,用于将所述融合特征向量和所述运行速度-载荷时序交互特征向量进行融合以得到所述优化运行速度-载荷时序交互特征向量。
6.根据权利要求5所述的悬臂起重机的安全智能监管系统,其特征在于,所述密集点分布采样融合二级子单元,用于:以如下融合优化公式对所述运行速度时序特征向量和所述运行载荷时序特征向量进行齐次吉尔伯特空间度量式密集点分布采样融合以得到所述融合特征向量;其中,所述融合优化公式为:其中,是所述运行速度时序特征向量,是所述运行载荷时序特征向量,表示所述运行载荷时序特征向量的转置向量,表示闵式距离,且为超参数,和分别是所述运行速度时序特征向量和所述运行载荷时序特征向量的全局特征均值,且特征向量和均为行向量,为按位置点乘,为按位置加法,是所述融合特征向量。
7.根据权利要求6所述的悬臂起重机的安全智能监管系统,其特征在于,所述运行状态分类判断子单元,用于:使用所述分类器的全连接层对所述优化运行速度-载荷时序交互特征向量进行全连接编码以得到编码分类特征向量;以及将所述编码分类特征向量输入所述分类器的softmax分类函数以得到所述分类结果。
8.一种悬臂起重机的安全智能监管方法,其特征在于,包括:采集悬臂起重机的运行参数,其中,所述运行参数为速度和载荷;基于所述运行参数对所述悬臂起重机的运行状态进行监测和评估,并在发现异常或危险情况时,发出警报和指令以控制所述悬臂起重机停止或调整;以及在屏幕上显示所述悬臂起重机的运行状态和安全评级信息,并提供相应的操作和管理功能;其中,基于所述运行参数对所述悬臂起重机的运行状态进行监测和评估,并在发现异常或危险情况时,发出警报和指令以控制所述悬臂起重机停止或调整,包括:通过传感器网络采集被监控悬臂起重机在预定时间段内多个预定时间点的速度值和载荷值;对所述多个预定时间点的速度值和载荷值进行时序协同关联分析以得到运行速度-载荷时序交互特征;以及基于所述运行速度-载荷时序交互特征,确定被监控悬臂起重机的运行状态是否正常。
技术总结
公开了一种悬臂起重机的安全智能监管系统及其方法。其首先采集悬臂起重机的运行参数,其中,所述运行参数为速度和载荷,接着,基于所述运行参数对所述悬臂起重机的运行状态进行监测和评估,并在发现异常或危险情况时,发出警报和指令以控制所述悬臂起重机停止或调整,然后,在屏幕上显示所述悬臂起重机的运行状态和安全评级信息,并提供相应的操作和管理功能。这样,可以避免人工周期或定期巡检带来的低效率以及低精准度和及时性差的问题,从而提高监管效果,减少事故风险,并提高工作效率。
技术研发人员:何新庄,任兆国,芦东亮,梁宸,芦东辉,王金平,杨叶青,刘航,张国强,任小锋,郭磊,李德江
受保护的技术使用者:新疆塔林投资(集团)有限责任公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!