一种智慧工厂的自动化装配机器人的制作方法
本发明涉及机器人领域,特别涉及一种智慧工厂的自动化装配机器人。
背景技术:
1、装配机器人是柔性自动化装配系统的核心设备,由机器人操作机、控制器、末端执行器和传感系统组成。其中操作机的结构类型有水平关节型、直角坐标型、多关节型和圆柱坐标型等。
2、在对不同规格颜色的物体进行打包装配时,传统的方式是人工坐在流水线的一侧或两侧,工人手动的将手里同一规格和颜色的物体依次的放置在打包箱内,最后人工将其抱在打包机上进行打包,操作过程自动化程度低,因此,需要一种智慧工厂的自动化装配机器人。
技术实现思路
1、本申请的目的在于提供一种智慧工厂的自动化装配机器人,以解决上述背景技术中提出在对不同规格颜色的物体进行打包装配时,传统的方式是人工坐在流水线的一侧或两侧,工人手动的将手里同一规格和颜色的物体依次的放置在打包箱内,最后人工将其抱在打包机上进行打包,操作过程自动化程度低的问题。
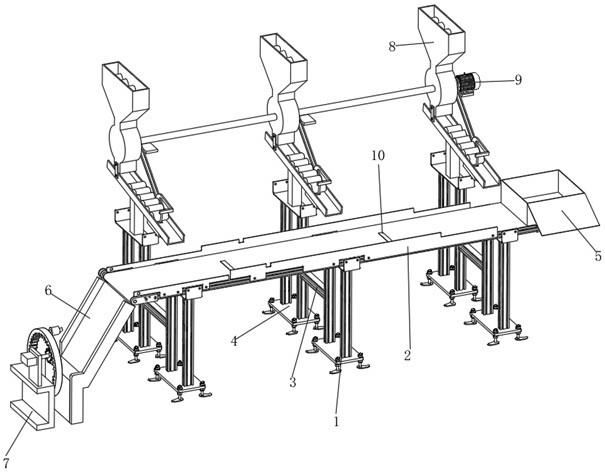
2、为实现上述目的,本申请提供如下技术方案:一种智慧工厂的自动化装配机器人,包括多个第一安装柱,多个所述第一安装柱的顶端安装有同一个流水传输线,所述流水传输线的表面安装有多个放置标签,多个所述第一安装柱的背面均固定连接有支撑连接杆,所述支撑连接杆的一端固定连接有第二安装柱,所述流水传输线的上表面放置有收纳箱,所述流水传输线的左方安装有下斜板,所述下斜板的左方安装有固定板,所述第二安装柱的上方安装有物料放置箱,所述第二安装柱的顶端固定连接有自动装配机构。
3、借由上述结构,通过设置第一安装柱,实现对流水传输线的支撑,通过设置支撑连接杆,保持对第二安装柱的连接支撑,通过设置第二安装柱,实现对物料放置箱的支撑稳定,通过设置收纳箱,收集滚落的不同物体,通过设置多个放置标签,提示操作者放置的准确位置,通过设置自动装配机构,对不同颜色或规格的物体进行自动下料进行包装,配合人工完成打包捆绑作业,提高自动化程度。
4、优选地,所述自动装配机构包括固定连接于第二安装柱上表面的支撑板,所述支撑板的顶端固定连接有倾斜板,所述倾斜板的上表面与物料放置箱的下表面固定连接,所述物料放置箱的右侧固定连接有第一电机,所述第一电机的输出端固定连接有驱动轴,所述驱动轴的表面固定连接有输送盘。
5、通过设置支撑板,实现对倾斜板的固定支撑,通过设置倾斜板,实现对物料放置箱的固定支撑,通过设置第一电机,启动第一电机,第一电机的输出端带动驱动轴转动,驱动轴转动带动输送盘转动,输送盘转动带动位于物料放置箱内的物料进行循环依次输送。
6、优选地,所述第一电机输出端的表面固定连接有主动轮,所述倾斜板的右侧固定连接有连接板,所述连接板的下表面固定连接有l形板,所述l形板的左侧转动连接有稳定轴,所述稳定轴的一端固定连接有凸轮。
7、通过设置主动轮,第一电机的输出端带动主动轮转动,通过设置连接板,实现对l形板的安装支撑,通过设置l形板,保持稳定轴安装支撑的稳定,通过设置凸轮,使得凸轮的表面与接触轴的表面接触,带动c形板受力发生转动。
8、优选地,所述稳定轴的表面固定连接有从动轮,所述从动轮与主动轮的表面套设有同一个皮带,所述倾斜板的右侧转动连接有c形板,所述c形板的一端固定连接有定位板,所述定位板的下表面固定连接有挡轴。
9、通过设置从动轮与主动轮的表面套设有同一个皮带,使得主动轮转动通过皮带带动从动轮转动,从动轮转动带动稳定轴转动,稳定轴转动带动凸轮转动,通过设置c形板,当c形板受力发生转动时,通过定位板的连接带动挡轴的高度上升,解除对位于倾斜板内物料的限制。
10、优选地,所述c形板的右侧固定连接有接触轴,所述接触轴的一端转动连接有滑块,所述滑块的上表面固定连接有顶针,所述倾斜板的内壁开设有导向槽。
11、通过设置接触轴,便于与凸轮接触受力,通过设置滑块,实现对顶针的安装支撑,通过设置导向槽,调节运动块的位置,通过设置顶针,对下一个位于倾斜板内滚动的物体进行阻挡定位。
12、优选地,所述倾斜板的下表面固定连接有导向板,所述滑块的左侧与导向板的右侧滑动连接,所述导向槽的内壁滑动连接有运动块,所述顶针的表面与运动块的内壁滑动连接。
13、通过设置导向板,对滑块的运动进行导向支撑,通过设置运动块,对顶针的运动方向进行定位。
14、优选地,所述固定板的上表面固定连接有安装板,所述安装板的左侧固定连接有第二电机,所述第二电机的输出端贯穿安装板的右侧并固定连接有齿轮。
15、通过设置安装板,实现对第二电机的安装支撑,通过设置第二电机,启动第二电机,第二电机的输出端带动齿轮转动,提供驱动齿轮转动的动力。
16、优选地,所述固定板的右侧转动连接有行星齿,所述行星齿与齿轮啮合,所述行星齿的右侧固定连接有支撑轴,所述支撑轴的表面固定连接有缠绕带。
17、通过设置行星齿,由于行星齿与齿轮啮合,使得齿轮转动带动行星齿转动,通过设置支撑轴,实现对缠绕带的稳定支撑,行星齿转动通过支撑轴带动缠绕带转动,缠绕带转动将放置在下斜板上方的收纳箱进行打包。
18、综上,本发明的技术效果和优点:
19、本发明中,通过设置支撑板,实现对倾斜板的固定支撑,通过设置倾斜板,实现对物料放置箱的固定支撑,通过设置第一电机,启动第一电机,第一电机的输出端带动驱动轴转动,驱动轴转动带动输送盘转动,输送盘转动带动位于物料放置箱内的物料进行循环依次输送,通过设置主动轮,第一电机的输出端带动主动轮转动,通过设置连接板,实现对l形板的安装支撑,通过设置l形板,保持稳定轴安装支撑的稳定,通过设置凸轮,使得凸轮的表面与接触轴的表面接触,带动c形板受力发生转动,通过设置从动轮与主动轮的表面套设有同一个皮带,使得主动轮转动通过皮带带动从动轮转动,从动轮转动带动稳定轴转动,稳定轴转动带动凸轮转动,通过设置c形板,当c形板受力发生转动时,通过定位板的连接带动挡轴的高度上升,解除对位于倾斜板内物料的限制。
20、通过设置接触轴,便于与凸轮接触受力,通过设置滑块,实现对顶针的安装支撑,通过设置导向槽,调节运动块的位置,通过设置顶针,对下一个位于倾斜板内滚动的物体进行阻挡定位,通过设置导向板,对滑块的运动进行导向支撑,通过设置运动块,对顶针的运动方向进行定位,通过设置安装板,实现对第二电机的安装支撑,通过设置第二电机,启动第二电机,第二电机的输出端带动齿轮转动,提供驱动齿轮转动的动力,通过设置行星齿,由于行星齿与齿轮啮合,使得齿轮转动带动行星齿转动,通过设置支撑轴,实现对缠绕带的稳定支撑,行星齿转动通过支撑轴带动缠绕带转动,缠绕带转动将放置在下斜板上方的收纳箱进行打包,借由上述结构,对不同颜色或规格的物体进行自动下料进行包装,配合人工完成打包捆绑作业,提高自动化程度。
技术特征:
1.一种智慧工厂的自动化装配机器人,包括多个第一安装柱(1),其特征在于:多个所述第一安装柱(1)的顶端安装有同一个流水传输线(2),所述流水传输线(2)的表面安装有多个放置标签(10),多个所述第一安装柱(1)的背面均固定连接有支撑连接杆(3),所述支撑连接杆(3)的一端固定连接有第二安装柱(4),所述流水传输线(2)的上表面放置有收纳箱(5),所述流水传输线(2)的左方安装有下斜板(6),所述下斜板(6)的左方安装有固定板(7),所述第二安装柱(4)的上方安装有物料放置箱(8),所述第二安装柱(4)的顶端固定连接有自动装配机构(9)。
2.根据权利要求1所述的一种智慧工厂的自动化装配机器人,其特征在于:所述自动装配机构(9)包括固定连接于第二安装柱(4)上表面的支撑板(903),所述支撑板(903)的顶端固定连接有倾斜板(902),所述倾斜板(902)的上表面与物料放置箱(8)的下表面固定连接,所述物料放置箱(8)的右侧固定连接有第一电机(901),所述第一电机(901)的输出端固定连接有驱动轴(925),所述驱动轴(925)的表面固定连接有输送盘(918)。
3.根据权利要求2所述的一种智慧工厂的自动化装配机器人,其特征在于:所述第一电机(901)输出端的表面固定连接有主动轮,所述倾斜板(902)的右侧固定连接有连接板(906),所述连接板(906)的下表面固定连接有l形板(905),所述l形板(905)的左侧转动连接有稳定轴,所述稳定轴的一端固定连接有凸轮(907)。
4.根据权利要求3所述的一种智慧工厂的自动化装配机器人,其特征在于:所述稳定轴的表面固定连接有从动轮(909),所述从动轮(909)与主动轮的表面套设有同一个皮带(904),所述倾斜板(902)的右侧转动连接有c形板(910),所述c形板(910)的一端固定连接有定位板(917),所述定位板(917)的下表面固定连接有挡轴(916)。
5.根据权利要求4所述的一种智慧工厂的自动化装配机器人,其特征在于:所述c形板(910)的右侧固定连接有接触轴(908),所述接触轴(908)的一端转动连接有滑块(915),所述滑块(915)的上表面固定连接有顶针(913),所述倾斜板(902)的内壁开设有导向槽(912)。
6.根据权利要求5所述的一种智慧工厂的自动化装配机器人,其特征在于:所述倾斜板(902)的下表面固定连接有导向板(914),所述滑块(915)的左侧与导向板(914)的右侧滑动连接。
7.根据权利要求5所述的一种智慧工厂的自动化装配机器人,其特征在于:所述导向槽(912)的内壁滑动连接有运动块(911),所述顶针(913)的表面与运动块(911)的内壁滑动连接。
8.根据权利要求1所述的一种智慧工厂的自动化装配机器人,其特征在于:所述固定板(7)的上表面固定连接有安装板(924),所述安装板(924)的左侧固定连接有第二电机(919),所述第二电机(919)的输出端贯穿安装板(924)的右侧并固定连接有齿轮(920)。
9.根据权利要求1所述的一种智慧工厂的自动化装配机器人,其特征在于:所述固定板(7)的右侧转动连接有行星齿(921),所述行星齿(921)与齿轮(920)啮合。
10.根据权利要求9所述的一种智慧工厂的自动化装配机器人,其特征在于:所述行星齿(921)的右侧固定连接有支撑轴(923),所述支撑轴(923)的表面固定连接有缠绕带(922)。
技术总结
本发明公开了一种智慧工厂的自动化装配机器人,涉及到机器人领域,包括多个第一安装柱,多个第一安装柱的顶端安装有同一个流水传输线,流水传输线的表面安装有多个放置标签,多个第一安装柱的背面均固定连接有支撑连接杆,支撑连接杆的一端固定连接有第二安装柱,流水传输线的上表面放置有收纳箱,流水传输线的左方安装有下斜板,下斜板的左方安装有固定板。本发明通过设置第二安装柱,实现对物料放置箱的支撑稳定,通过设置收纳箱,收集滚落的不同物体,通过设置多个放置标签,提示操作者放置的准确位置,通过设置自动装配机构,对不同颜色或规格的物体进行自动下料进行包装,配合人工完成打包捆绑作业,提高自动化程度。
技术研发人员:封冠宏,王亚东,征亚
受保护的技术使用者:盐城冠宏科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!