电机驱动的六自由度摇摆装置及工作方法与流程
本发明涉及运动模拟仿真,具体涉及电机驱动的六自由度摇摆装置及工作方法。
背景技术:
1、在六自由度运动模拟领域,一般采用液压油缸等驱动机构对运动平台进行驱动,且液压油缸的数量不止一个,多个液压油缸组合驱动会占据很大的空间,且采用液压油缸对运动平台进行驱动,液压油缸采用油路驱动,致使运动平台的响应很慢,且精度不高。
2、随着当前对于运动模拟精度以及装备小型化设计要求的提高,液压油缸的驱动方式已不属于优选方式,而目前其他高精度运动机构与摇摆装置进行集合时存在设计复杂、设计成本高等缺陷,无法兼容精度、成本以及小型化设计的要求。
3、基于此,本申请发明人提出一种电机驱动的六自由度摇摆装置及控制方法,以期解决上述技术问题。
技术实现思路
1、本发明要解决的技术问题是为了克服现有技术中传统运动模拟设备无法满足高精度、低成本以及小型化设计的缺陷,提供一种电机驱动的六自由度摇摆装置及工作方法。
2、本发明是通过下述技术方案来解决上述技术问题的:
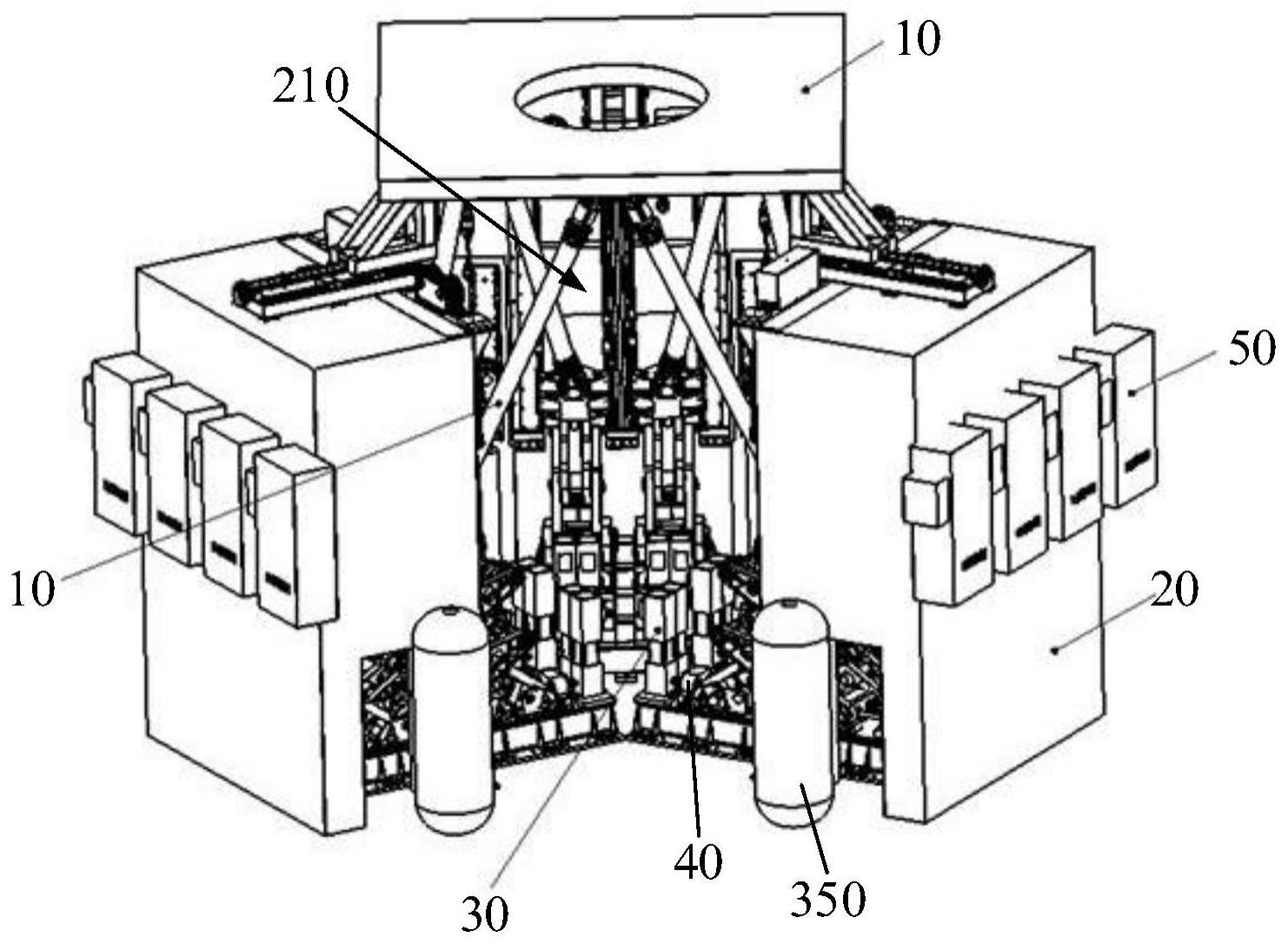
3、本发明提供了一种电机驱动的六自由度摇摆装置,其特点在于,包括:运动平台以及竖向设置在所述运动平台下方的三个支撑平台,三个所述支撑平台呈等边三角形分布,每个所述支撑平台均通过两条支链与所述运动平台连接,每个所述支撑平台上的两条支链沿着竖直方向呈轴对称分布,每条所述支链对应设有一个滑块,所述滑块与所述支撑平台上竖向设置的导轨滑动连接,每个所述滑块的底部连接一个剪叉机构,每个所述剪叉机构均通过至少一组电机驱动单元驱动,所述电机驱动单元固定设置在所述支撑平台的底座上,所述支撑平台上还设有用于控制电机驱动单元的控制器。
4、根据本发明的一个实施例,所述支链的所述剪叉机构从上到下由多组依次交叉连接的剪叉臂组成,所述剪叉机构的最上方通过转轴与所述滑块连接,所述剪叉机构最下方的两端通过滑座与所述电机驱动单元相连接,每个所述滑座至少对应连接一个所述电机驱动单元。
5、根据本发明的一个实施例,三个所述支撑平台交叉排布形成放置空间,所述竖直导轨安装于所述支撑平台朝向所述放置空间的一侧;
6、所述竖直导轨的长度延伸方向与所述剪叉机构的伸缩方向一致。
7、根据本发明的一个实施例,所述滑块包括连接端和安装端,所述连接端与所述竖直导轨滑动配合,所述安装端与所述连杆二自由度转动配合,所述连杆与所述运动平台之间三自由度转动配合。
8、根据本发明的一个实施例,多组所述剪叉臂的尺寸沿竖直方向由下至上递减。
9、根据本发明的一个实施例,所述支撑平台朝向所述放置空间一侧开设有第一避让空间,所述剪叉机构的端部至少延伸至所述第一避让空间内侧。
10、根据本发明的一个实施例,每一所述剪叉机构两侧各对应设置一个所述电机驱动单元;
11、所述支撑平台上开设有第二避让空间,所述电机驱动单元至少部分容置于所述第二避让空间。
12、根据本发明的一个实施例,多组所述电机驱动单元分别与所述控制器相连接,所述控制器用于分别控制所述电机驱动单元对于所述剪叉机构的驱动力,以调整所述连杆的升降距离。
13、根据本发明的一个实施例,所述竖直导轨上设有距离传感器,用于检测所述滑块的移动距离;
14、所述连杆背离所述滑块的一端与运动平台相连接,所述连杆内设有压力传感器,用于检测所述运动平台施加于所述连杆的压力值。
15、本发明还提供了一种电机驱动的大角度、重载、高速自由度摇摆控制方法,其特点在于,利用如上所述的电机驱动的六自由度摇摆装置实现,其特点在于,包括:
16、获取运动平台的运动路径;
17、根据所述运动路径调整多组所述电机驱动单元对于所述剪叉机构的驱动力;
18、依据压力传感器实时获取连杆所受的压力值,并对所述压力值进行实时监测。
19、本发明的积极进步效果在于:
20、本发明电机驱动的六自由度摇摆装置采用电机驱动而非液压油杆,动态响应特性更好,稳定可靠,且节约资源,而且,电机固定不动增加了驱动系统的稳定性,可以解决伸缩油缸中油路和控制线缆的弯折疲劳问题。
21、传统的伸缩油缸设计空间形状为伞形,空间利用率低,而本申请采用尺寸更小的电机驱动,空间的排布更加灵活,运动可调性更高。
技术特征:
1.一种电机驱动的六自由度摇摆装置,其特征在于,包括:运动平台以及竖向设置在所述运动平台下方的三个支撑平台,三个所述支撑平台呈等边三角形分布,每个所述支撑平台均通过两条支链与所述运动平台连接,每个所述支撑平台上的两条支链沿着竖直方向呈轴对称分布,每条所述支链对应设有一个滑块,所述滑块与所述支撑平台上竖向设置的导轨滑动连接,每个所述滑块的底部连接一个剪叉机构,每个所述剪叉机构均通过至少一组电机驱动单元驱动,所述电机驱动单元固定设置在所述支撑平台的底座上,所述支撑平台上还设有用于控制电机驱动单元的控制器。
2.根据权利要求1所述的电机驱动的六自由度摇摆装置,其特征在于,所述支链的所述剪叉机构从上到下由多组依次交叉连接的剪叉臂组成,所述剪叉机构的最上方通过转轴与所述滑块连接,所述剪叉机构最下方的两端通过滑座与所述电机驱动单元相连接,每个所述滑座至少对应连接一个所述电机驱动单元。
3.根据权利要求2所述的电机驱动的六自由度摇摆装置,其特征在于,三个所述支撑平台交叉排布形成放置空间,所述竖直导轨安装于所述支撑平台朝向所述放置空间的一侧;
4.根据权利要求3所述的电机驱动的六自由度摇摆装置,其特征在于,还包括连杆;
5.根据权利要求3所述的电机驱动的六自由度摇摆装置,其特征在于,多组所述剪叉臂的尺寸沿竖直方向由下至上递减。
6.根据权利要求5所述的电机驱动的六自由度摇摆装置,其特征在于,所述支撑平台朝向所述放置空间一侧开设有第一避让空间,所述剪叉机构的端部至少延伸至所述第一避让空间内侧。
7.根据权利要求4所述的电机驱动的六自由度摇摆装置,其特征在于,每一所述剪叉机构两侧各对应设置一个所述电机驱动单元;
8.根据权利要求7所述的电机驱动的六自由度摇摆装置,其特征在于,多组所述电机驱动单元分别与所述控制器相连接,所述控制器用于分别控制所述电机驱动单元对于所述剪叉机构的驱动力,以调整所述连杆的升降距离。
9.根据权利要求4所述的电机驱动的六自由度摇摆装置,其特征在于,所述竖直导轨上设有距离传感器,用于检测所述滑块的移动距离;
10.一种电机驱动的大角度、重载、高速自由度摇摆控制方法,利用如权利要求1-9任一项所述的电机驱动的六自由度摇摆装置实现,其特征在于,包括:
技术总结
本发明提供一种电机驱动的六自由度摇摆装置及工作方法,电机驱动的六自由度摇摆装置包括运动平台以及竖向设置在运动平台下方的三个支撑平台,三个支撑平台呈等边三角形分布,每个支撑平台均通过两条支链与运动平台连接,每个支撑平台上的两条支链沿着竖直方向呈轴对称分布,每条支链对应设有一个滑块,滑块与支撑平台上竖向设置的导轨滑动连接,每个滑块的底部连接一个剪叉机构,每个剪叉机构均通过至少一组电机驱动单元驱动,电机驱动单元固定设置在支撑平台的底座上,支撑平台上还设有用于控制电机驱动单元的控制器。上述电机驱动的六自由度摇摆装置采用电机驱动而非液压油杆,动态响应特性更好,稳定可靠,且节约资源。
技术研发人员:李成武,卢洪早,高峰,邵长磊,白勇军,李雷
受保护的技术使用者:上海核工程研究设计院股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!