一种基于旁路微调的高精度卷筒装置及调整方法
本发明属于绳驱动并联机器人,具体涉及一种基于旁路微调的高精度卷筒装置及调整方法。
背景技术:
1、绳驱动机器人采用柔性绳索代替刚性构件作为运动链,具有负载能力强、工作空间大、模块化程度高等优点。其中,绳长调节机构是绳驱动并联机器人的核心组成部分,绳驱动机器人采用电机卷筒来控制绳索的长度,进而控制末端动平台的位姿。为提高控制精度,在驱动过程中不仅需要精确控制绳索的长度,还需要实时监测绳索张力。
2、专利公开号cn103922199a公开了一种具有张紧力测量功能的高精度卷索装置,此发明通过协调卷筒的转动和平移运动,保证卷筒出索位置和姿态相对于底板基本恒定,从而有效地提高绳索的控制精度,同时可以实时测量绳索的张力,避免绳索负载过大而导致绳索断裂。
3、专利公开号cn106989152a公开了一种高精度绳索驱动装置,在驱动过程中通过绳索导引机构保证绳索在刻槽卷筒上顺序缠绕或者释放,同时检测绳索上拉力,精确控制输出绳索拉力,并通过万向导出装置将绳索引导到目标工作位置。
4、但以上两种高精度绳长调节装置均只能控制电机卷筒出绳点到末端动平台绳索固定点的绳索总长,无法细微调节某一段绳索的长度进而调节末端动平台的微小姿态变化。
技术实现思路
1、针对现有技术的不足,本发明的目的在于提供一种基于旁路微调的高精度卷筒装置及调整方法,解决了现有技术中的问题。
2、本发明的目的可以通过以下技术方案实现:
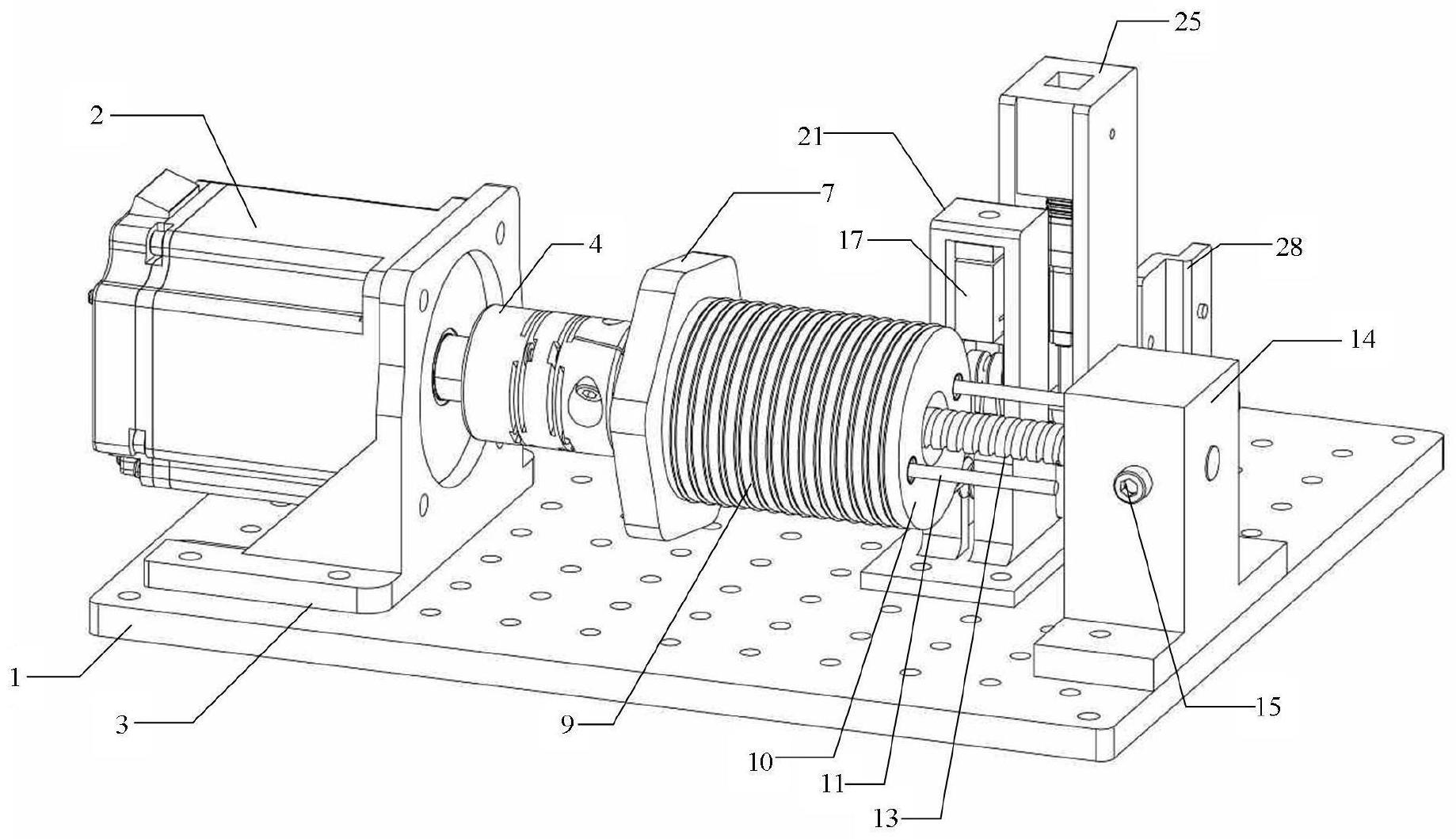
3、一种基于旁路微调的高精度卷筒装置,包括定位板,定位板上方设置有绳驱动机构和绳长微调机构,绳驱动机构包括能够转动且能同时沿其轴向进给的电机卷筒,电机卷筒上设置有吊环来固定绳索的绳头;
4、所述绳长微调机构包括固定在定位板上端的直线型推杆支架,直线型推杆支架上固定有直线型推杆,直线型推杆末端通过动滑轮连接件连接动滑轮,绳索与滑轮配合接触,直线型推杆控制动滑轮下压处于水平绷紧状态的绳索。
5、进一步地,所述直线型推杆支架的两侧分别固定有力传感器支架和万向导轮支架,力传感器支架位于电机卷筒与直线型推杆支架之间,力传感器支架上设置有第一定滑轮,万向导轮支架上固定第二定滑轮和万向导轮,绳索从电机卷筒引出分别经过第一定滑轮、动滑轮、第二定滑轮以及万向导轮。
6、进一步地,所述绳驱动机构包括电机,电机的转轴上同轴固定有变径联轴器,变径联轴器的一侧设置有滑竿固定座,滑竿固定座上固定有有两个直线滑竿,滑竿固定座的一侧设置有电机卷筒,电机卷筒通过直线轴承安装在直线滑竿上;
7、滑竿固定座上设置有轴套,轴套上配合安装有轴承,轴承上设置有丝杆,丝杆的另一端固定有丝杆固定座,丝杆固定组与定位板固定连接;电机卷筒轴心紧固一个丝杆螺母,丝杆螺母与丝杆螺纹配合。
8、进一步地,所述电机卷筒上开设有呈螺旋线式分步的绳槽,其螺距与丝杆螺距相同。
9、进一步地,所述丝杆固定座设置锁紧螺栓,来将丝杆固定。
10、进一步地,所述定位板上端设置有绳张力测量机构,绳张力测量机构包括安装在力传感器支架上的第一导线轮和力传感器连接架,力传感器连接架上安装有力传感器和第二导线轮,电机卷筒引出的绳索依次通过第一导线轮、第二导线轮和第一定滑轮,绳索对第二导线轮的拉力通过力传感器测量。
11、进一步地,所述电机卷筒的出绳位置与第一导线轮的绳槽相切。
12、进一步地,所述绳索速度与电机角速度的关系为:
13、
14、式中,r为电机卷筒的半径,表示绳索的速度向量,表示电机的角速度向量。
15、进一步地,所述直线型推杆推力f与绳索张力t满足下式:
16、
17、f=2t1sinγ
18、
19、式中,δh为直线型推杆行程;b为第一定滑轮和动滑轮的圆心距;f为直线型推杆作用在绳索上的推力;t1为绳索张力,其中t=t1=t2;γ为绳索与ag之间的夹角,其中a、g分别是绳索处于水平状态时,绳索与第一定滑轮和第二定滑轮的切点。
20、所述直线型推杆行程δh为1-10mm,第一定滑轮和第二定滑轮的圆心距取200mm
21、本发明的有益效果:
22、1、本发明采用了电机卷筒和绳长微调机构共同配合调节绳长,电机卷筒可以实现大幅度的绳长调节,进而可以快速地改变末端动平台的位姿;绳长微调机构可实现绳长的微调,可以有效提高绳索的控制精度,从而可以精确地控制末端动平台的位姿。
23、2、本发明通过设置丝杆、丝杆螺母、直线滑竿来协同电机卷筒的转动和沿丝杆轴的平移运动,使电机卷筒在收绳和放绳的过程中沿直线滑竿平移,控制绳索在电机卷筒上的收放位置,实现了绳索在电机卷筒上的按绳槽顺序收放,保证电机卷筒的出绳位置时刻保持不变,从而有效的提高绳索控制的精度。同时,可以力传感器实时测量绳索的张力,避免绳索的虚牵和过载断裂。
24、3、本发明的绳长微调机构的部分结构简单,采用毫米级高精度的直线型推杆下压处于水平绷紧状态的绳索,且绳索与直线型推杆上的动滑轮只有单纯的推压接触,没有复杂的绳索缠绕,安装容易,操作简单且调节精度高。
25、4、本发明的绳长微调机构既可以起到绳长微调的作用,又可以起到绳索等效刚度调节的作用,无需另外设计刚度调节装置,即可保证机构的稳定性。
技术特征:
1.一种基于旁路微调的高精度卷筒装置,包括定位板(1),其特征在于,定位板(1)上方设置有绳驱动机构和绳长微调机构,绳驱动机构包括能够转动且能同时沿其轴向进给的电机卷筒(10),电机卷筒(10)上设置有吊环(29)来固定绳索(9)的绳头;
2.根据权利要求1所述的一种基于旁路微调的高精度卷筒装置,其特征在于,所述直线型推杆支架(25)的两侧分别固定有力传感器支架(21)和万向导轮支架(28),力传感器支架(21)位于电机卷筒(10)与直线型推杆支架(25)之间,力传感器支架(21)上设置有第一定滑轮(20),万向导轮支架(28)上固定第二定滑轮(26)和万向导轮(27),绳索(9)从电机卷筒(10)引出分别经过第一定滑轮(20)、动滑轮(24)、第二定滑轮(26)以及万向导轮(27)。
3.根据权利要求1所述的一种基于旁路微调的高精度卷筒装置,其特征在于,所述绳驱动机构包括电机(2),电机(2)的转轴上同轴固定有变径联轴器(4),变径联轴器(4)的一侧设置有滑竿固定座(7),滑竿固定座(7)上固定有有两个直线滑竿(11),滑竿固定座(7)的一侧设置有电机卷筒(10),电机卷筒(10)通过直线轴承(12)安装在直线滑竿(11)上;
4.根据权利要求3所述的一种基于旁路微调的高精度卷筒装置,其特征在于,所述电机卷筒(10)上开设有呈螺旋线式分步的绳槽,其螺距与丝杆(13)螺距相同。
5.根据权利要求3所述的一种基于旁路微调的高精度卷筒装置,其特征在于,所述丝杆固定座(14)设置锁紧螺栓(15),来将丝杆(13)固定。
6.根据权利要求1所述的一种基于旁路微调的高精度卷筒装置,其特征在于,所述定位板(1)上端设置有绳张力测量机构,绳张力测量机构包括安装在力传感器支架(21)上的第一导线轮(16)和力传感器连接架(18),力传感器连接架(18)上安装有力传感器(17)和第二导线轮(19),电机卷筒(10)引出的绳索(9)依次通过第一导线轮(16)、第二导线轮(19)和第一定滑轮(20),绳索(9)对第二导线轮(19)的拉力通过力传感器(17)测量。
7.根据权利要求6所述的一种基于旁路微调的高精度卷筒装置,其特征在于,所述电机卷筒(10)的出绳位置与第一导线轮(16)的绳槽相切。
8.根据权利要求1所述的一种基于旁路微调的高精度卷筒装置,其特征在于,所述绳索(9)速度与电机(2)角速度的关系为:
9.根据权利要求2所述的一种基于旁路微调的高精度卷筒装置,其特征在于,所述直线型推杆(22)推力f与绳索(9)张力t满足下式:
10.根据权利要求2或9所述的一种基于旁路微调的高精度卷筒装置,其特征在于,所述直线型推杆(22)行程δh为1-10mm,第一定滑轮(20)和第二定滑轮(26)的圆心距取200mm。
技术总结
本发明公开一种基于旁路微调的高精度卷筒装置及调整方法,属于绳索驱动并联机器人领域;一种基于旁路微调的高精度卷筒装置,包括定位板,定位板上方设置有绳驱动机构和绳长微调机构,绳驱动机构包括能够转动且能同时沿其轴向进给的电机卷筒,电机卷筒上设置有吊环来固定绳索的绳头;所述绳长微调机构包括固定在定位板上端的直线型推杆支架,直线型推杆支架上固定有直线型推杆,直线型推杆末端通过动滑轮连接件连接动滑轮,绳索与滑轮配合接触,直线型推杆控制动滑轮下压处于水平绷紧状态的绳索绳长微调机构可实现绳长的微调,可以有效提高绳索的控制精度,从而可以精确地控制末端动平台的位姿。
技术研发人员:项升,陆文龙,杨扬,韦中,刘佳
受保护的技术使用者:南京信息工程大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!