无人驾驶航空器远程数据实时传输方法、系统和存储介质与流程
本发明涉及无人驾驶航空器作业,更具体的,涉及一种无人驾驶航空器远程数据实时传输方法、系统和存储介质。
背景技术:
1、随着科学技术的不断发展,无人驾驶航空器的应用得到了空前的发展,民用方面,无人驾驶航空器+行业应用,是无人驾驶航空器真正的刚需;在航拍、农业、植保、微型自拍、快递运输、灾难救援、观察野生动物、监控传染病、测绘、新闻报道、电力巡检、救灾、影视拍摄、制造浪漫等等领域的应用,大大的拓展了无人驾驶航空器本身的用途。
2、同时,无人驾驶航空器在应用时,会摄录采集很多作业现场的数据,需要将数据进行回传,由于在传输时,存在信号的干扰以及传输机制的不恰当经常会导致数据传输出错的情况发生。
技术实现思路
1、本发明的目的是提供一种无人驾驶航空器远程数据实时传输方法、系统和存储介质,可以根据无人驾驶航空器的实时运行数据选择对应的实时传输机制,从而保障数据的传输稳定,并且能够在无人驾驶航空器发生波动及时停止传输,以保障数据安全传输。
2、本发明第一方面提供了一种无人驾驶航空器远程数据实时传输方法,包括以下步骤:
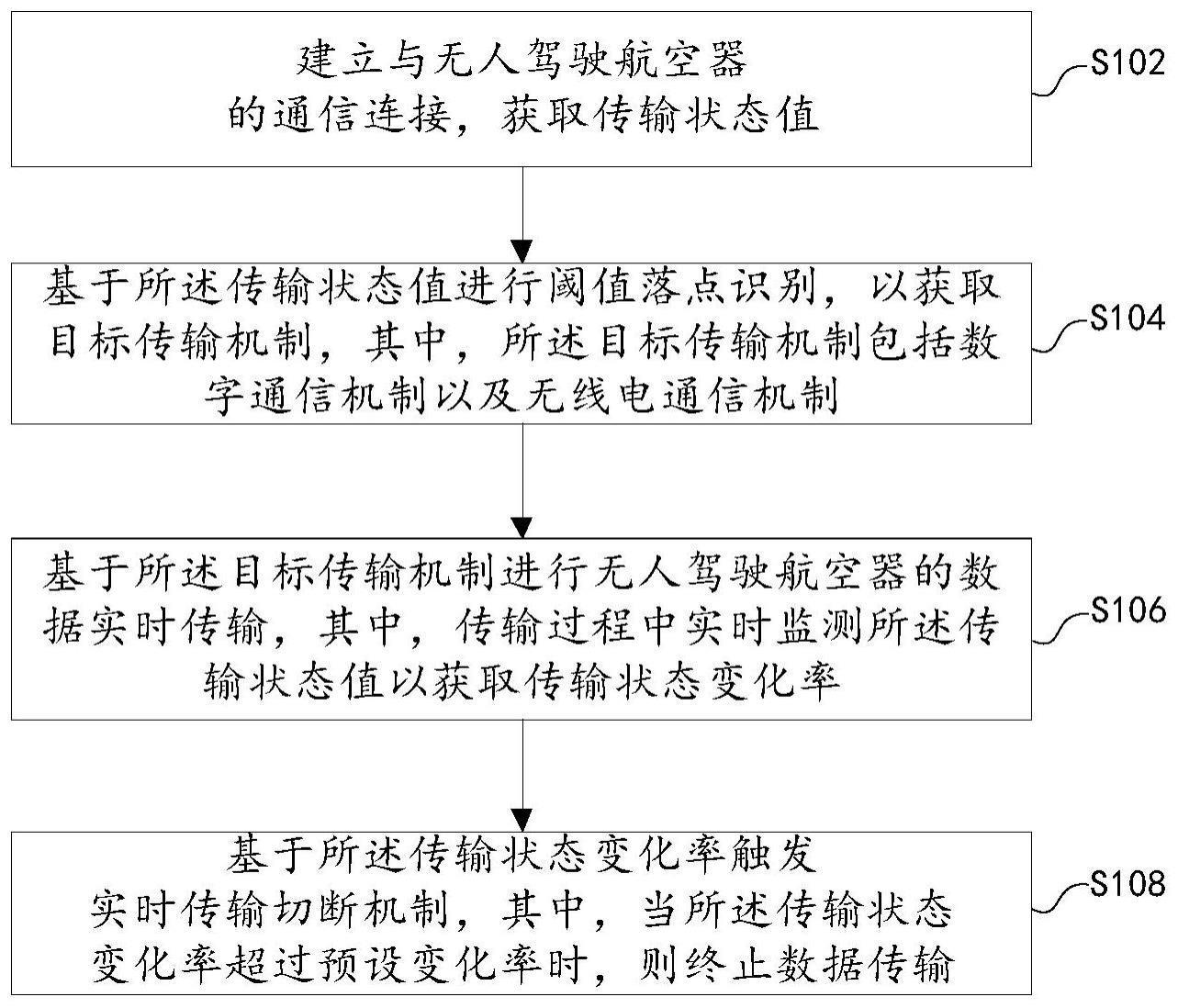
3、建立与无人驾驶航空器的通信连接,获取传输状态值;
4、基于所述传输状态值进行阈值落点识别,以获取目标传输机制,其中,所述目标传输机制包括数字通信机制以及无线电通信机制;
5、基于所述目标传输机制进行无人驾驶航空器的数据实时传输,其中,传输过程中实时监测所述传输状态值以获取传输状态变化率;
6、基于所述传输状态变化率触发实时传输切断机制,其中,当所述传输状态变化率超过预设变化率时,则终止数据传输。
7、本方案中,所述建立与无人驾驶航空器的通信连接,获取传输状态值,具体包括:
8、建立与所述无人驾驶航空器的通信连接,以获取当前无人驾驶航空器的自检数据;
9、基于所述自检数据识别数据传输量级以及飞行状态量级;
10、基于所述数据传输量级以及所述飞行状态量级进行等级识别得到所述传输状态值。
11、本方案中,所述基于所述数据传输量级以及所述飞行状态量级进行等级识别得到所述传输状态值,具体包括:
12、基于所述数据传输量级得到对应数据传输级别的第一等级;
13、基于所述飞行状态量级得到对应飞行状态级别的第二等级;
14、基于所述第一等级以及所述第二等级结合预设的数据配置表得到当前无人驾驶航空器的所述传输状态值。
15、本方案中,所述基于所述传输状态值进行阈值落点识别,以获取目标传输机制,具体包括:
16、基于所述传输状态值进行阈值落点识别,以识别目标落点位置,其中,
17、当所述目标落点位置位于第一阈值范围内时,基于数字通信机制作为所述目标传输机制;
18、当所述目标落点位置位于第二阈值范围内时,基于无线电通信机制作为所述目标传输机制。
19、本方案中,所述基于所述目标传输机制进行无人驾驶航空器的数据实时传输,其中,传输过程中实时监测所述传输状态值以获取传输状态变化率,具体包括:
20、在无人驾驶航空器数据实时传输过程中,计算相邻单位时间内传输状态值的差值;
21、基于所述差值与前一个单位时间内的传输状态值进行计算得到所述传输状态变化率。
22、本方案中,所述基于所述传输状态变化率触发实时传输切断机制,其中,当所述传输状态变化率超过预设变化率时,则终止数据传输,具体包括:
23、基于所述传输状态变化率与所述预设变化率进行比较,其中,
24、当所述传输状态变化率小于或者等于所述预设变化率时,基于对应的所述目标传输机制进行数据传输;
25、当所述传输状态变化率大于所述预设变化率时,则终止数据传输。
26、本发明第二方面还提供一种无人驾驶航空器远程数据实时传输系统,包括存储器和处理器,所述存储器中包括无人驾驶航空器远程数据实时传输方法程序,所述无人驾驶航空器远程数据实时传输方法程序被所述处理器执行时实现如下步骤:
27、建立与无人驾驶航空器的通信连接,获取传输状态值;
28、基于所述传输状态值进行阈值落点识别,以获取目标传输机制,其中,所述目标传输机制包括数字通信机制以及无线电通信机制;
29、基于所述目标传输机制进行无人驾驶航空器的数据实时传输,其中,传输过程中实时监测所述传输状态值以获取传输状态变化率;
30、基于所述传输状态变化率触发实时传输切断机制,其中,当所述传输状态变化率超过预设变化率时,则终止数据传输。
31、本方案中,所述建立与无人驾驶航空器的通信连接,获取传输状态值,具体包括:
32、建立与所述无人驾驶航空器的通信连接,以获取当前无人驾驶航空器的自检数据;
33、基于所述自检数据识别数据传输量级以及飞行状态量级;
34、基于所述数据传输量级以及所述飞行状态量级进行等级识别得到所述传输状态值。
35、本方案中,所述基于所述数据传输量级以及所述飞行状态量级进行等级识别得到所述传输状态值,具体包括:
36、基于所述数据传输量级得到对应数据传输级别的第一等级;
37、基于所述飞行状态量级得到对应飞行状态级别的第二等级;
38、基于所述第一等级以及所述第二等级结合预设的数据配置表得到当前无人驾驶航空器的所述传输状态值。
39、本方案中,所述基于所述传输状态值进行阈值落点识别,以获取目标传输机制,具体包括:
40、基于所述传输状态值进行阈值落点识别,以识别目标落点位置,其中,
41、当所述目标落点位置位于第一阈值范围内时,基于数字通信机制作为所述目标传输机制;
42、当所述目标落点位置位于第二阈值范围内时,基于无线电通信机制作为所述目标传输机制。
43、本方案中,所述基于所述目标传输机制进行无人驾驶航空器的数据实时传输,其中,传输过程中实时监测所述传输状态值以获取传输状态变化率,具体包括:
44、在无人驾驶航空器数据实时传输过程中,计算相邻单位时间内传输状态值的差值;
45、基于所述差值与前一个单位时间内的传输状态值进行计算得到所述传输状态变化率。
46、本方案中,所述基于所述传输状态变化率触发实时传输切断机制,其中,当所述传输状态变化率超过预设变化率时,则终止数据传输,具体包括:
47、基于所述传输状态变化率与所述预设变化率进行比较,其中,
48、当所述传输状态变化率小于或者等于所述预设变化率时,基于对应的所述目标传输机制进行数据传输;
49、当所述传输状态变化率大于所述预设变化率时,则终止数据传输。
50、本发明第三方面提供了一种计算机可读存储介质,所述计算机可读存储介质中包括机器的一种无人驾驶航空器远程数据实时传输方法程序,所述无人驾驶航空器远程数据实时传输方法程序被处理器执行时,实现如上述任一项所述的一种无人驾驶航空器远程数据实时传输方法的步骤。
51、本发明公开的一种无人驾驶航空器远程数据实时传输方法、系统和存储介质,可以根据无人驾驶航空器的实时运行数据选择对应的实时传输机制,从而保障数据的传输稳定,并且能够在无人驾驶航空器发生波动及时停止传输,以保障数据安全传输。
- 还没有人留言评论。精彩留言会获得点赞!