一种钢带卷码垛方法与流程
本发明属于钢带卷码垛,具体涉及一种钢带卷码垛方法。
背景技术:
1、目前钢带生产行业(如锯带等)由于工艺要求,需要将钢带分成需要长度的分卷并进行码垛。目前该行业进行码垛时主要有两种方法:手工方法和自动码垛方法,其他行业卷料的码垛方法一般采用真空吸盘或电磁吸盘的方法。最原始的手工方法就是将分卷拖到码垛点快速松手依靠钢带卷自重落到升降台上;自动码垛方法是采用机械夹爪夹持钢卷边缘平移至码垛地点堆放;真空吸盘或电磁吸盘是用吸盘吸住卷料旋转、平移至指定地点码垛。但是,这些码垛方法均有各自的缺点:手工码垛方法消耗体力过大而且不安全,尤其是宽规格分卷重达150kg,根本无法拖动;机械夹爪方法采取直接从收料机上抓取钢带边缘平移至码垛处码垛,这种方法因只抓取料卷边缘,容易产生钢卷放松及掉落的安全隐患;真空吸盘因钢带卷表面达不到非常平整不足以形成真空无法吸取钢带分卷;而电磁吸盘方法也不能用于钢带卷码垛,由于钢带卷被电磁铁吸住一段时间后会被磁化,严重影响后续加工产生。
技术实现思路
1、为解决上述问题,本发明旨在提供一种钢带卷码垛方法,通过采用机械手水平拖动钢带卷,从而将钢带卷平移至卸料板上,解决机械夹爪夹持过程中钢带卷跌落的安全隐患。
2、为了实现上述目的,本发明所采用的技术方案是:
3、一种钢带卷码垛方法,包括以下步骤:
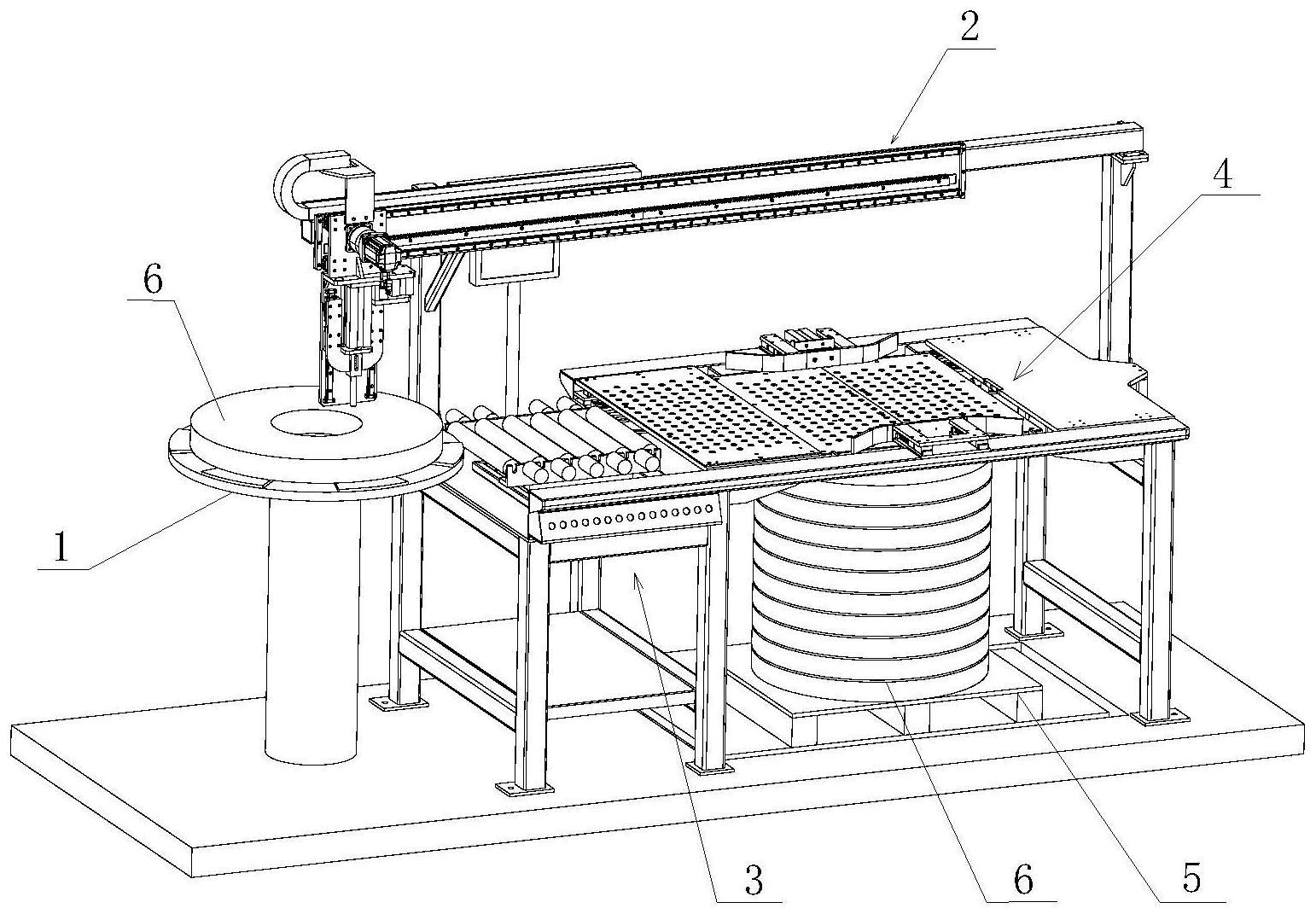
4、s1、调整码垛装置的定位卸料平台,所述定位卸料平台包括卸料机架,该卸料机架上设有左右相对设置的左定位板和右推料板、前后相对设置的前定位板和后推料板、卸料板,所述卸料板上表面的高度低于左定位板和右推料板上表面的高度;移动左定位板和前定位板,直到位于定位卸料平台下方的升降平台的中心线a-a与左定位板之间的距离和所述中心线a-a与前定位板之间的距离均等于钢带卷的半径;
5、s2、采用机械手将位于钢带卷收料台上经分卷后的钢带卷水平拖动至卸料板上,所述机械手位于钢带卷收料台和定位卸料平台的上方;
6、s3、移动右推料板和后推料板使得钢带卷与左定位板和前定位板相抵接从而对钢带卷进行定位,此时钢带卷的中心线与所述升降平台的中心线a-a重合;
7、s4、移动或打开卸料板,钢带卷在重力作用下自由落体至升降平台上;
8、s5、重复步骤s2~s4,使得多个钢带卷码成一垛。
9、左定位板及右推料板与卸料板之间的落差一方面保证卸料板可以在卸钢带卷时,可缩回至左定位板及右推料板下方;另一方面在钢带卷到达卸料板上后,左定位板可作为后推料板及右推料板将钢带卷推到卸料中心的定位板,保证每次卸料的中心一致,从而保证码垛整齐。本发明的钢带卷码垛方法,通过采用机械手水平拖动钢带卷,从而将钢带卷平移至卸料板上,解决了机械夹爪夹持过程中钢带卷跌落的安全隐患。
10、优选的,所述钢带卷收料台与左定位板之间还设有称重设备,该称重设备上设有称重辊,称重辊上表面与左定位板和钢带卷收料台上表面齐平。设置称重设备可便于对钢带卷进行称重,设置称重辊可以防止钢带卷因摩擦而受到刮伤。
11、具体的,步骤s2中,机械手带动钢带卷平移至称重辊上,待称重设备对钢带卷称重完毕后,机械手带动钢带卷向右平移至卸料板上。
12、优选的,所述称重设备上还设有控制系统,该控制系统与机械手电连接。称重设备对钢带卷称重完成后,控制系统发出信号,机械手继续驱动钢带卷向卸料板移动。
13、优选的,步骤s2中,所述机械手包括机械手机架,该机械手机架上设有机械手指、与机械手指相连的水平驱动机构和垂直驱动机构;启动垂直驱动机构和水平驱动机构,使得机械手指的下端伸入到钢带卷的内圈内;启动水平驱动机构,使得机械手指带动钢带卷平移至卸料板上,机械手指缩回。通过机械手指伸进钢带卷内圈中,并对钢带卷内圈表面施加水平推力,从而将钢带卷平移至卸料板上。
14、优选的,步骤s2中,当钢带卷进入至卸料板上时,启动垂直驱动机构,使得机械手指继续向下移动且始终与钢带卷内圈相接触,钢带卷在卸料板上就位后,机械手指缩回。由于卸料板上表面的高度低于左定位板上表面的高度,为了保证机械手指始终与钢带卷内圈相接触,当钢带卷进入至卸料板上时,启动垂直驱动机构,使得机械手指继续下移。
15、优选的,所述机械手机架沿卸料机架长度方向延伸,机械手机架远离钢带卷收料台的端部与卸料机架端部相连;所述机械手机架上设有限位挡块,该限位挡块设置在升降平台中心线与右推料板之间。设置限位挡块便于对机械手指在水平方向上的移动进行限位。
16、优选的,步骤s4中,所述升降平台为液压升降平台,将升降平台的初始位置调整至最高点,每码好一卷钢带卷,升降平台则下降一饼钢带卷的高度,保证每次码垛的落差高度一致。采用液压驱动升降平台,使得升降平台可以上下自如升降到行程内的任何一个位置。
17、优选的,所述后推料板与后推料机构相连,所述右推料板与右推料机构相连,所述卸料板与卸料机构相连,所述后推料机构、右推料机构和卸料机构均设置在卸料机架上。通过设置后推料机构驱动后推料板移动,设置右推料机构驱动右推料板移动,设置卸料机构驱动卸料板移动,右推料机构、卸料机构和后推料机构可采用缸体活塞机构。
18、优选的,所述卸料板和左定位板上表面均开设有多个孔洞,该孔洞内设有万向球,所述万向球可在孔洞内转动。设置万向球可防止钢带卷在卸料板和左定位板上移动时因摩擦而受到刮伤。
19、与现有技术相比,本发明的有益效果如下:
20、1.本发明的钢带卷码垛方法,通过机械手指伸进钢带卷内圈中,并对钢带卷内圈表面施加水平推力,从而将钢带卷平移至卸料板上,解决了机械夹爪夹持过程中钢带卷跌落的安全隐患;
21、2.本发明的钢带卷码垛方法,所采用的的码垛装置结构简单,布置方便紧凑,占地空间小;
22、3.本发明的钢带卷码垛方法,操作便利,称重方便准确,码垛整齐。
技术特征:
1.一种钢带卷码垛方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的钢带卷码垛方法,其特征在于:所述钢带卷收料台(1)与左定位板(41)之间还设有称重设备(3),该称重设备(3)上设有称重辊(31),称重辊(31)上表面与左定位板(42)和钢带卷收料台(1)上表面齐平。
3.根据权利要求2所述的钢带卷码垛方法,其特征在于:步骤s2中,机械手(2)带动钢带卷(6)平移至称重辊(31)上,待称重设备(3)对钢带卷(6)称重完毕后,机械手(2)带动钢带卷(6)向右平移至卸料板(42)上。
4.根据权利要求2所述的钢带卷码垛方法,其特征在于:所述称重设备(3)上还设有控制系统,该控制系统与机械手(2)电连接。
5.根据权利要求1所述的钢带卷码垛方法,其特征在于:步骤s2中,所述机械手(2)包括机械手机架(213),该机械手机架(213)上设有机械手指(21)、与机械手指(21)相连的水平驱动机构和垂直驱动机构;启动垂直驱动机构和水平驱动机构,使得机械手指(21)的下端伸入到钢带卷(6)的内圈内;启动水平驱动机构,使得机械手指(21)带动钢带卷(6)平移至卸料板(42)上,机械手指(21)缩回。
6.根据权利要求5所述的钢带卷码垛方法,其特征在于:步骤s2中,当钢带卷(6)进入至卸料板(42)上时,启动垂直驱动机构,使得机械手指(21)继续向下移动且始终与钢带卷(6)内圈相接触,钢带卷(6)在卸料板(42)上就位后,机械手指(21)缩回。
7.根据权利要求5所述的钢带卷码垛方法,其特征在于:所述机械手机架(213)沿卸料机架(412)长度方向延伸,机械手机架(213)远离钢带卷收料台(1)的端部与卸料机架(412)端部相连;所述机械手机架(213)上设有限位挡块(212),该限位挡块(212)设置在升降平台(5)中心线与右推料板(45)之间。
8.根据权利要求1所述的钢带卷码垛方法,其特征在于:步骤s4中,所述升降平台(5)为液压升降平台,将升降平台(5)的初始位置调整至最高点,每码好一卷钢带卷(6),升降平台(5)则下降一饼钢带卷(6)的高度,保证每次码垛的落差高度一致。
9.根据权利要求1所述的钢带卷码垛方法,其特征在于:所述后推料板(44)与后推料机构相连,所述右推料板(45)与右推料机构相连,所述卸料板(42)与卸料机构相连,所述后推料机构、右推料机构和卸料机构均设置在卸料机架(412)上。
10.根据权利要求1所述的钢带卷码垛方法,其特征在于:所述卸料板(42)和左定位板(41)上表面均开设有多个孔洞,该孔洞内设有万向球(413),所述万向球(413)可在孔洞内转动。
技术总结
本发明公开了一种钢带卷码垛方法,其包括以下步骤:S1、调整码垛装置的定位卸料平台;S2、采用机械手将位于钢带卷收料台上经分卷后的钢带卷水平拖动至卸料板上;S3、移动右推料板和后推料板使得钢带卷与左定位板和前定位板相抵接从而对钢带卷进行定位;S4、移动或打开卸料板,钢带卷在重力作用下自由落体至升降平台上;S5、重复步骤S2~S4,使得多个钢带卷码成一垛。本发明的钢带卷码垛方法通过采用机械手水平拖动钢带卷,从而将钢带卷平移至卸料板上,解决了机械夹爪夹持过程中钢带卷跌落的安全隐患。
技术研发人员:罗侃,彭奇,蔡翠兰,黄鼎
受保护的技术使用者:湖南泰嘉新材料科技股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!