鸡爪自动化真空包装设备及其工作方法与流程
本发明涉及食品生产,尤其是涉及鸡爪自动化真空包装设备及其工作方法。
背景技术:
1、食品真空包装是将食品装入包装袋后,抽出包装袋内的空气,达到预定真空度后,完成封口工序,在食品行业,真空包装应用非常普遍,腌制品如各种酱菜以及豆制品、果脯等各种各样需要保鲜的食品越来越多地采用真空包装,食品真空包装的主要作用是除氧,有利于防止食品变质,其原理也比较简单,因食品霉腐变质主要由微生物的活动造成,而大多数微生物(如霉菌和酵母菌)的生存是需要氧气的,而真空包装就是运用这个原理,把包装袋内和食品细胞内的氧气抽掉,使微生物失去生存的环境,因此经过真空包装的食品保鲜期长,大大延长食品的保质期。
2、比如授权公告号cn113928633b的专利文献,其公开一种鸡爪全自动真空包装机组,涉及食品生产领域,包括支撑机构,所述支撑机构的顶端设置有旋转移料机构,支撑机构的后端顶部连接有夹持运料机构,支撑机构的顶部前端设置有夹持运料机构,夹持运料机构的右侧设置有装料机构,装料机构的后端连接于支撑机构的顶部前端,装料机构的底端设置有分切机构,装料机构的顶端设置有装料机构,装料机构设置于支撑机构的顶部前端,所述支撑机构包括支撑台,支撑台底端固定连接有多个支撑座,支撑台后端固定连接有分切连接支架;同时,该发明在使用时,通过设置有旋转移料机构,在入料的过程中与夹持运料机构相配合,防止运料过程中对装料的鸡爪造成因人工失误造成的污染。
3、但是上述专利文献中其至少存在以下问题:
4、其转移物料的方式主要是通过夹持运料机构,其实质上为一个夹爪,一般仅能夹持单个鸡爪,无法添加液体,而泡椒凤爪则需要一定汤料保持其风味;而且作为包装食品需要保持固液一定的比例,上述装置无法实现,现有技术中一般采用人工称重添加的方式。
技术实现思路
1、本发明的目的在于提供鸡爪自动化真空包装设备及其工作方法,以解决现有技术中仅能夹持单个鸡爪、无法控制鸡爪的固液比例的技术问题。
2、本发明提供鸡爪自动化真空包装设备,包括:
3、底座;
4、分离前仓,设于所述底座上,且用于承装鸡爪制品的固液混合物料;
5、分离后仓,设于所述底座上,且位于所述分离前仓的斜上方,用于承装鸡爪制品的固体物料;
6、鸡爪运输脱水一体装置,用于将所述分离前仓内固液混合物料边脱水边运输至所述分离后仓内;
7、投料装置,用于将所述分离后仓的固液物料按照预设比例投送至给袋式真空包装装置的上料机构内。
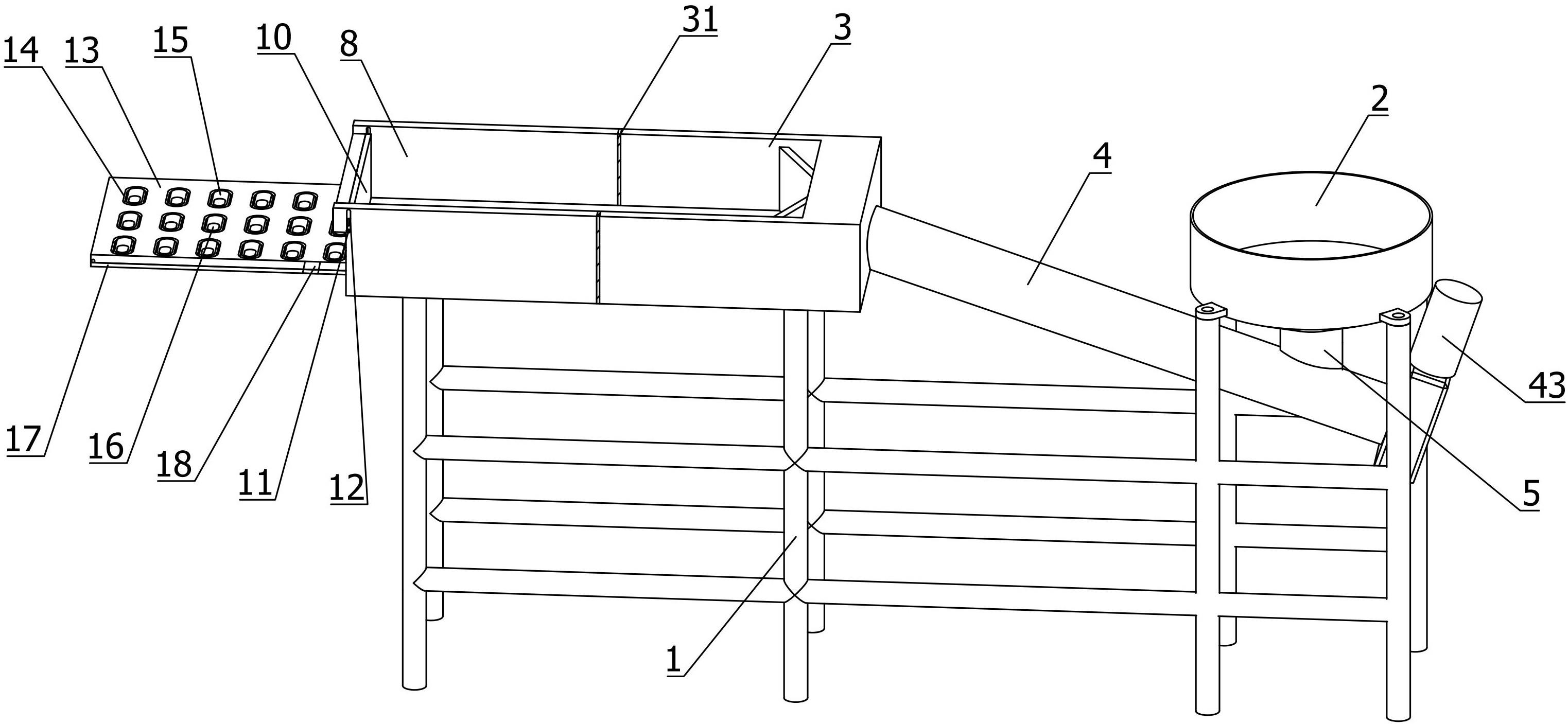
8、进一步,所述鸡爪运输脱水一体装置包括双层传输管道,所述双层传输管道的底端设置在所述分离后仓的下方,并通过贯通部与所述分离前仓的仓底连通,所述双层传输管道的顶端与所述分离后仓仓内相通,所述双层传输管道的底部固定有动力源机构,所述双层传输管道具有夹层腔和柱体腔,所述动力源机构输出端转动安装有嵌设于所述柱体腔的螺旋输送叶片,所述螺旋输送叶片的外缘与所述柱体腔的腔壁之间设有阻挡鸡爪通过而允许液体通过的空隙,所述柱体腔的顶面设有连通所述夹层腔的水分离孔,在所述螺旋输送叶片对鸡爪进行螺旋输送时,所述螺旋输送叶片能够通过自转产生的离心力将鸡爪上附带水分通过所述水分离孔甩入所述夹层腔。
9、进一步,所述投料装置包括通过活动连接结构安装于所述分离后仓远离所述双层传输管道一侧的振动分选仓,所述振动分选仓远离所述双层传输管道一侧设有插入口,所述插入口的上方设有上升滑槽,所述插入口的内侧活动设有门板,所述门板的顶端设有转轴一,所述转轴一可滑动且可自转地嵌套至所述上升滑槽内,所述振动分选仓与所述底座相连,且所述底座上设有用于驱动所述振动分选仓振动的驱振装置。
10、进一步,所述投料装置还包括分料板,所述分料板用于从所述插入口插入所述振动分选仓内,所述分料板上阵列设有多个穿槽,每个所述穿槽内均通过转轴二转动安装有平衡转板,所述平衡转板的上下表面均设有鸡爪槽,且同一所述平衡转板上的两个鸡爪槽关于所述平衡转板的中心对称,所述鸡爪槽仅能容纳单个鸡爪,所述平衡转板的下表面转动设有固定板,所述平衡转板与所述固定板之间设有能够使得两者叠合或张开的角度控制机构,所述分料板通过运动驱使装置进行驱动。
11、进一步,所述运动驱使装置包括通过连板固定在所述振动分选仓上的竖向滑槽,所述竖向滑槽内设有竖向滑块,所述竖向滑块上固定有伸缩杆一,所述分料板上连接有控制臂,所述伸缩杆一的远离所述竖向滑槽的一端与所述分料板进行铰接,所述控制臂的下表面铰接有伸缩杆二的一端,所述伸缩杆二的另一端与所述伸缩杆一的中部铰接。
12、进一步,所述上升滑槽的顶端连接有伸缩杆三,所述伸缩杆三的底端通过转套可转动地套设在转轴一上。
13、进一步,所述给袋式真空包装装置的上料机构设置在所述振动分选仓远离所述双层传输管道的一侧,所述分料板的正投影面积小于所述给袋式真空包装装置的上料机构的正投影面积。
14、进一步,所述转轴二上设有传感器,所述夹层腔内的最低位置上连通有加料管的一端,所述加料管通过水泵进行驱动,所述加料管的另一端设有自动阀门,用于向所述给袋式真空包装装置的上料机构定量加入鸡爪制品的液体物料。
15、进一步,所述螺旋输送叶片的外缘设有清洁结构。
16、本发明还提供上述鸡爪自动化真空包装设备的工作方法,包括如下步骤:
17、步骤100、通过旋转的方式去除鸡爪表面多余的液体;
18、步骤200、采集上述液体;
19、步骤300、使得鸡爪数量和上述采集液体液体按照预设比例添加至给袋式真空包装机的上料机构中;
20、步骤400、使用给袋式真空包装机对含有预设固体液体比例的鸡爪进行真空包装。
21、与现有技术相比较,本发明的有益效果在于:
22、(1)本发明的鸡爪自动化真空包装设备能够先分离鸡爪的固体和液体,然后通过平衡转板一侧受力则自动投料的特点,通过记录一次翻转然后释放一定的液体,使得鸡爪的固体比例始终恰当,且一次能够投放多个鸡爪。
23、(2)更进一步,本发明的螺旋输送叶片上斜输送方式,能够对鸡爪表面的游离水分进行去除,且能够防止过度脱水。
技术特征:
1.鸡爪自动化真空包装设备,其特征在于:包括:
2.如权利要求1所述的鸡爪自动化真空包装设备,其特征在于:所述鸡爪运输脱水一体装置包括双层传输管道(4),所述双层传输管道(4)的底端设置在所述分离后仓(3)的下方,并通过贯通部(5)与所述分离前仓(2)的仓底连通,所述双层传输管道(4)的顶端与所述分离后仓(3)仓内相通,所述双层传输管道(4)的底部固定有动力源机构(43),所述双层传输管道(4)具有夹层腔(41)和柱体腔(42),所述动力源机构(43)输出端转动安装有嵌设于所述柱体腔(42)的螺旋输送叶片(6),所述螺旋输送叶片(6)的外缘与所述柱体腔(42)的腔壁之间设有阻挡鸡爪通过而允许液体通过的空隙,所述柱体腔(42)的顶面设有连通所述夹层腔(41)的水分离孔(7),在所述螺旋输送叶片(6)对鸡爪进行螺旋输送时,所述螺旋输送叶片(6)能够通过自转产生的离心力将鸡爪上附带水分通过所述水分离孔(7)甩入所述夹层腔(41)。
3.如权利要求2所述的鸡爪自动化真空包装设备,其特征在于:所述投料装置包括通过活动连接结构(31)安装于所述分离后仓(3)远离所述双层传输管道(4)一侧的振动分选仓(8),所述振动分选仓(8)远离所述双层传输管道(4)一侧设有插入口,所述插入口的上方设有上升滑槽(12),所述插入口的内侧活动设有门板(10),所述门板(10)的顶端设有转轴一(11),所述转轴一(11)可滑动且可自转地嵌套至所述上升滑槽(12)内,所述振动分选仓(8)与所述底座(1)相连,且所述底座(1)上设有用于驱动所述振动分选仓(8)振动的驱振装置。
4.如权利要求3所述的鸡爪自动化真空包装设备,其特征在于:所述投料装置还包括分料板(13),所述分料板(13)用于从所述插入口插入所述振动分选仓(8)内,所述分料板(13)上阵列设有多个穿槽(14),每个所述穿槽(14)内均通过转轴二(28)转动安装有平衡转板(15),所述平衡转板(15)的上下表面均设有鸡爪槽(16),且同一所述平衡转板(15)上的两个鸡爪槽(16)关于所述平衡转板(15)的中心对称,所述鸡爪槽(16)仅能容纳单个鸡爪,所述平衡转板(15)的下表面转动设有固定板(17),所述平衡转板(15)与所述固定板(17)之间设有能够使得两者叠合或张开的角度控制机构(18),所述分料板(13)通过运动驱使装置进行驱动。
5.如权利要求4所述的鸡爪自动化真空包装设备,其特征在于:所述运动驱使装置包括通过连板(29)固定在所述振动分选仓(8)上的竖向滑槽(19),所述竖向滑槽(19)内设有竖向滑块(20),所述竖向滑块(20)上固定有伸缩杆一(21),所述分料板(13)上连接有控制臂(22),所述伸缩杆一(21)的远离所述竖向滑槽(19)的一端与所述分料板(13)进行铰接,所述控制臂(22)的下表面铰接有伸缩杆二(30)的一端,所述伸缩杆二(30)的另一端与所述伸缩杆一(21)的中部铰接。
6.如权利要求5所述的鸡爪自动化真空包装设备,其特征在于:所述上升滑槽(12)的顶端连接有伸缩杆三(23),所述伸缩杆三(23)的底端通过转套(24)可转动地套设在转轴一(11)上。
7.如权利要求6所述的鸡爪自动化真空包装设备,其特征在于:所述给袋式真空包装装置的上料机构(25)设置在所述振动分选仓(8)远离所述双层传输管道(4)的一侧,所述分料板(13)的正投影面积小于所述给袋式真空包装装置的上料机构(25)的正投影面积。
8.如权利要求7所述的鸡爪自动化真空包装设备,其特征在于:所述转轴二(28)上设有传感器,所述夹层腔(41)内的最低位置上连通有加料管(26)的一端,所述加料管(26)通过水泵进行驱动,所述加料管(26)的另一端设有自动阀门(27),用于向所述给袋式真空包装装置的上料机构(25)定量加入鸡爪制品的液体物料。
9.如权利要求8所述的鸡爪自动化真空包装设备,其特征在于:所述螺旋输送叶片(6)的外缘设有清洁结构(61)。
10.如权利要求1-9任一项所述的鸡爪自动化真空包装设备的工作方法,其特征在于:包括如下步骤:
技术总结
本发明公开了鸡爪自动化真空包装设备及其工作方法,涉及食品生产技术领域。其包括:底座;分离前仓,设于底座上,且用于承装鸡爪制品的固液混合物料;分离后仓,设于底座上,且位于分离前仓的斜上方,用于承装鸡爪制品的固体物料;鸡爪运输脱水一体装置,用于将分离前仓内固液混合物料边脱水边运输至分离后仓内;投料装置,用于将分离后仓的固液物料按照预设比例投送至给袋式真空包装装置的上料机构内。本发明的鸡爪自动化真空包装设备能够先分离鸡爪的固体和液体,然后通过平衡转板一侧受力则自动投料的特点,通过记录一次翻转然后释放一定的液体,使得鸡爪的固体比例始终恰当,且一次能够投放多个鸡爪。
技术研发人员:陈众,董晓晓,彭希迅,马平,舒波,姜荣正,杨克威
受保护的技术使用者:浙江味意食品有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!