一种平板货车的自动卸货方法与流程
本发明涉及智能物流,特别是涉及了一种平板货车的自动卸货方法。
背景技术:
1、平板货车送货到厂区卸货区后,都是用人工操作叉车将货物从车上叉取卸货到指定位置。这种人工卸货方式费工费时,也有很大的安全隐患。随着计算机与机器人技术的快速发展,无人搬运车(automated guided vehicle,agv)在物流行业中的广泛应用,标志着仓储物流技术向自动化和智能化发展。目前有自动agv叉车可以实现货物的搬运,但是这种搬运是通过导航定位将固定位置的货物叉取搬运到指定坐标的目的点。在货车卸货时,货车虽然是在卸货区,但人工操作货车使得停车位置误差比较大,远远大于agv定位所能接受的误差值;而且货物在货车上的摆放位置也比较随意,不利于后续的后期agv搬运;纯agv导航自动卸车对停车和平板车高度,货物位置等有非常高的要求,操作难度较高,因此,纯粹的agv叉车无法完成货车的货物自动卸车的功能。为此,本发明揭示一种平板货车的自动卸货方法,解决以上问题。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种平板货车的自动卸货方法,通过获取平板货车上的托盘上参考点在agv地图坐标系中的第二坐标,粗略定位托盘位置,再利用agv叉车上的检测装置获取托盘上参考点的第三坐标,对托盘进行二次定位,动态规划agv叉车行走路径,对货车的停车要求不高,提高了agv叉车的叉取定位精度,方便叉车卸货,能够实现全自动、智能化卸货,节省了人工,大大提高了卸货效率。
2、为了解决上述技术问题,本发明采用了如下所述的技术方案:
3、一种平板货车的自动卸货方法,其包括:
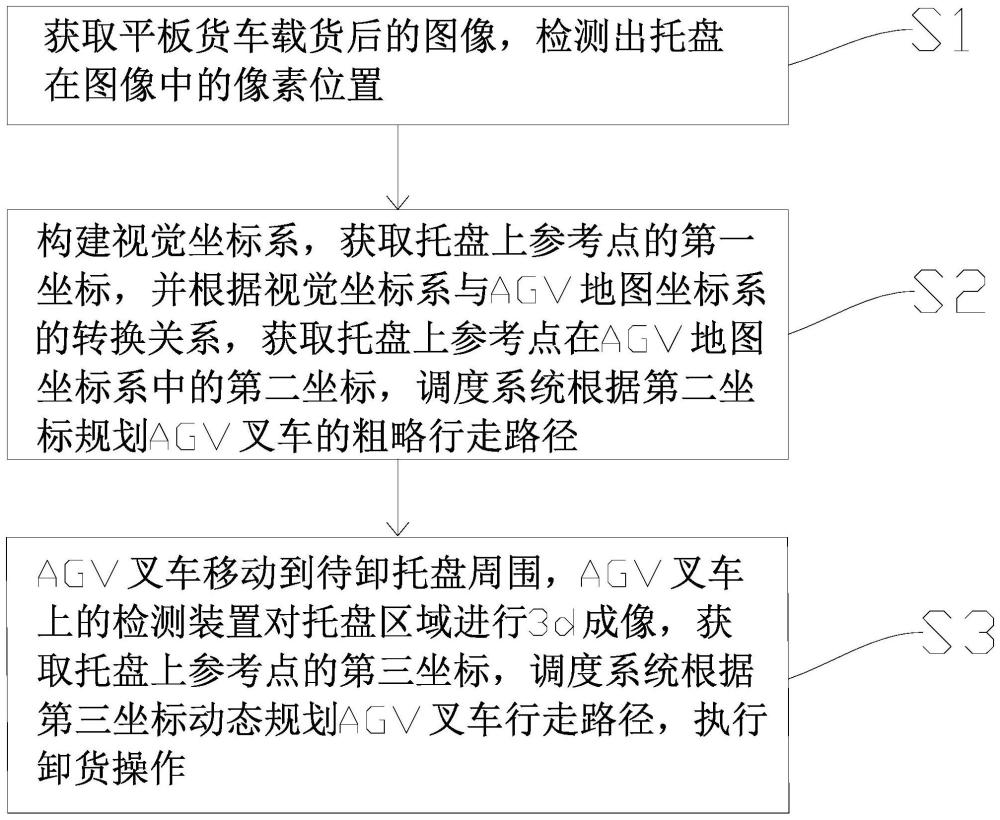
4、s1、获取平板货车载货后的图像,检测出托盘在图像中的像素位置;
5、s2、构建视觉坐标系,获取托盘上参考点的第一坐标,并根据视觉坐标系与agv地图坐标系的转换关系,获取托盘上参考点在agv地图坐标系中的第二坐标,调度系统根据第二坐标规划agv叉车的粗略行走路径;
6、s3、agv叉车移动到待卸托盘周围,agv叉车上的检测装置对托盘区域进行3d成像,获取托盘上参考点的第三坐标,调度系统根据第三坐标动态规划agv叉车行走路径,执行卸货操作。
7、作为本发明提供的所述平板货车的自动卸货方法的一种优选实施方式,平板货车驶入厂房入口时,监测设备获取货车型号,并与存储系统内的货车车辆信息进行匹配,同时监测设备判定货车是否装有货物,货车载货时,启动导引路线,货车跟随导引路线驶入卸货区。
8、作为本发明提供的所述平板货车的自动卸货方法的一种优选实施方式,所述导引路线为led指示灯条。
9、作为本发明提供的所述平板货车的自动卸货方法的一种优选实施方式,所述s1的具体操作为:货车停在卸货区后,启动卸车程序,卸货区两侧的托盘检测相机对载货托盘成像,并采用深度学习算法对图像中的托盘进行检测,并检测出托盘在图像中的像素位置。
10、作为本发明提供的所述平板货车的自动卸货方法的一种优选实施方式,所述平板货车上装载的托盘为两列,两列托盘沿着货车上平板的长度方向并排设置,并且每列托盘的外侧面均靠近货车上平板的侧边。
11、作为本发明提供的所述平板货车的自动卸货方法的一种优选实施方式,所述s2中以托盘检测相机参考建立视觉坐标系,选取托盘外侧面的中心点为参考点。
12、作为本发明提供的所述平板货车的自动卸货方法的一种优选实施方式,所述s3中根据agv叉车上的检测装置对托盘区域进行3d成像,获取托盘外侧面的平面方程以及托盘孔的位置,进而获取托盘相对agv叉车的相对坐标,在根据agv叉车在agv地图坐标系中的位置,获取托盘上参考点在agv地图坐标系中的第三坐标。
13、作为本发明提供的所述平板货车的自动卸货方法的一种优选实施方式,所述agv叉车移动到待卸托盘3-4m处,检测装置对托盘区域进行3d成像,其中,检测装置为tof相机。
14、与现有技术相比,本发明有以下有益效果:
15、本发明提供的平板货车的自动卸货方法,通过获取平板货车上的托盘上参考点在agv地图坐标系中的第二坐标,粗略定位托盘位置,再利用agv叉车上的检测装置获取托盘上参考点的第三坐标,对托盘进行二次定位,动态规划agv叉车行走路径,对货车的停车要求不高,提高了agv叉车的叉取定位精度,方便叉车卸货,能够实现全自动、智能化卸货,节省了人工,大大提高了卸货效率。
技术特征:
1.一种平板货车的自动卸货方法,其特征在于,包括:
2.根据权利要求1所述的一种平板货车的自动卸货方法,其特征在于,平板货车驶入厂房入口时,监测设备获取货车型号,并与存储系统内的货车车辆信息进行匹配,同时监测设备判定货车是否装有货物,货车载货时,启动导引路线,货车跟随导引路线驶入卸货区。
3.根据权利要求2所述的一种平板货车的自动卸货方法,其特征在于,所述导引路线为led指示灯条。
4.根据权利要求1所述的一种平板货车的自动卸货方法,其特征在于,所述s1的具体操作为:货车停在卸货区后,启动卸车程序,卸货区两侧的托盘检测相机对载货托盘成像,并采用深度学习算法对图像中的托盘进行检测,并检测出托盘在图像中的像素位置。
5.根据权利要求4所述的一种平板货车的自动卸货方法,其特征在于,所述平板货车上装载的托盘为两列,两列托盘沿着货车上平板的长度方向并排设置,并且每列托盘的外侧面均靠近货车上平板的侧边。
6.根据权利要求1所述的一种平板货车的自动卸货方法,其特征在于,所述s2中以托盘检测相机参考建立视觉坐标系,选取托盘外侧面的中心点为参考点。
7.根据权利要求1所述的一种平板货车的自动卸货方法,其特征在于,所述s3中根据agv叉车上的检测装置对托盘区域进行3d成像,获取托盘外侧面的平面方程以及托盘孔的位置,进而获取托盘相对agv叉车的相对坐标,在根据agv叉车在agv地图坐标系中的位置,获取托盘上参考点在agv地图坐标系中的第三坐标。
8.根据权利要求7所述的一种平板货车的自动卸货方法,其特征在于,所述agv叉车移动到待卸托盘3-4m处,检测装置对托盘区域进行3d成像,其中,检测装置为tof相机。
技术总结
本发明公开了一种平板货车的自动卸货方法,涉及智能物流领域,其包括获取平板货车载货后的图像,检测出托盘在图像中的像素位置;构建视觉坐标系获取托盘上参考点的第一坐标,并根据视觉坐标系与AGV地图坐标系的转换关系,获取托盘上参考点在AGV地图坐标系中的第二坐标,调度系统根据第二坐标规划AGV叉车的粗略行走路径;AGV叉车上的检测装置对托盘区域3d成像,获取托盘上参考点的第三坐标,调度系统根据第三坐标动态规划AGV叉车行走路径,执行卸货操作;本发明对托盘二次视觉检测定位,动态规划AGV叉车行走路径,对货车的停车要求不高,提高了AGV叉车的叉取定位精度,方便叉车卸货,能够实现全自动、智能化卸货,节省了人工,提高了卸货效率。
技术研发人员:廖鑫,胡磊,朱亮亮,廖小鹏
受保护的技术使用者:合肥市极点智库智能装备有限公司
技术研发日:
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!