一种高空三维移动作业平台的制作方法
本发明涉及轨道车辆生产制造,尤其涉及一种高空三维移动作业平台。
背景技术:
1、现有的作业平台只能沿列车静调轨道线路一个方向上移动,其仅能适用于外形尺寸单一的轨道车辆,不能同时适用于城铁车、高速动车组、普速铁路客车等不同外形尺寸车辆(主要为车辆宽度和高度)的车顶作业需求,不满足现阶段各种型号轨道车辆生产实际需要。
2、因此,基于上述技术问题,本领域的技术人员亟需研发一种高空三维移动作业平台。
技术实现思路
1、本发明的目的是提供一种高空三维移动作业平台,解决了现有作业平台适用性和通用性差、不能同时满足所生产的不同车型对作业尺寸空间的不同需求的问题,解除制造装备限制,提高制造工艺的柔性化。
2、为了实现上述目的,本发明提供如下技术方案:
3、本发明的一种高空三维移动作业平台,该三维移动作业平台包括:
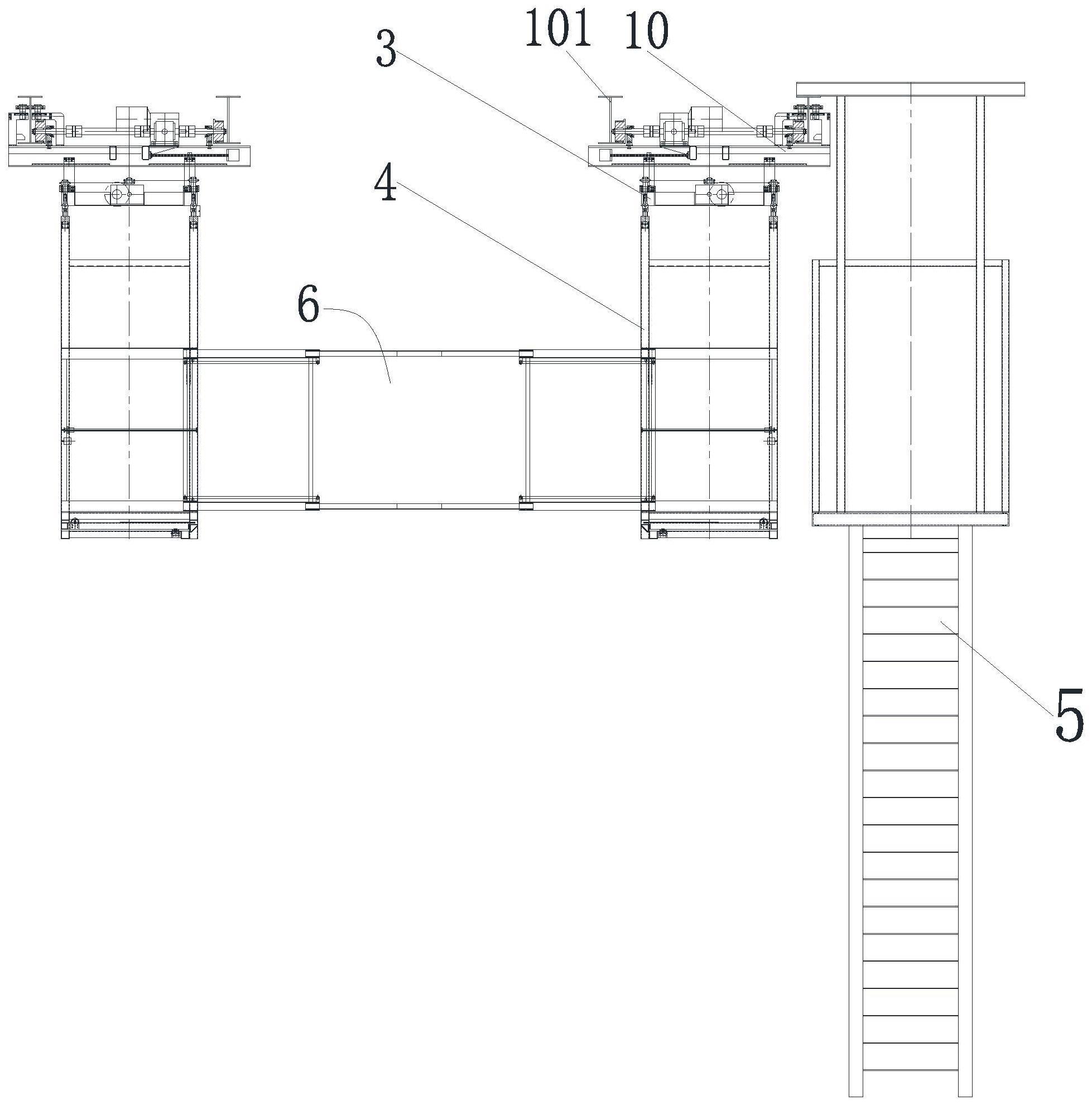
4、两组对称布置的三维移动机构,所述每组三维移动机构下部设置有平台移动舱,所述平台移动舱通过所述三维移动机构调节位置,且两组所述三维移动机构的所述平台移动舱之间设置有安全围栏;以及
5、位于其中一组所述三维移动机构侧面的平台升降梯机构,所述平台升降梯机构设有能够升降的梯子和与梯子上端连接的过渡平台。
6、进一步的,所述三维移动机构包括:
7、纵横移动结构和垂直移动结构;
8、所述垂直移动结构与所述纵横移动结构连接以通过所述纵横移动结构调节纵向位置和横向位置;
9、所述平台移动舱与所述垂直移动结构连接以通过所述垂直移动结构调节竖直位置。
10、进一步的,所述纵横移动结构包括:
11、两根对称布置的纵向移动轨道和两根对称布置、并位于所述纵向移动轨道长度方向两端的横向移动轨道;
12、纵向移动驱动结构和横向移动驱动结构;
13、所述纵向移动驱动结构包括:
14、纵向移动驱动电机,所述纵向移动驱动电机的输出端设置有纵向移动减速机;
15、与所述纵向移动减速机的输出端连接,并通过所述纵向移动驱动电机驱动的纵向移动纵向传动轴;
16、所述纵向移动纵向传动轴的输出端连接有纵向移动齿轮换向器,所述纵向移动齿轮换向器的两端的输出端传动连接有纵向移动横向传动轴,每根所述纵向移动横向传动轴的输出端均设置有纵向行走轮,所述纵向行走轮位于所述纵向移动轨道上。
17、进一步的,所述横向移动驱动结构包括:
18、横向移动驱动电机;以及
19、连接于所述横向移动驱动电机的输出端的横向移动丝杠,所述横向移动驱动电机驱动所述横向移动丝杠转动,以驱动所述横向移动丝杠上的横向移动驱动丝母沿横向移动;
20、所述横向移动驱动丝母连接有垂直移动机构悬挂件;
21、所述垂直移动结构连接于所述垂直移动机构悬挂件。
22、进一步的,所述垂直移动结构包括:
23、垂直移动结构承载主体;
24、集成于所述垂直移动结构承载主体的垂直移动驱动电机,所述垂直移动驱动电机的输出端设置有垂直移动换向器;
25、与所述垂直移动驱动电机通过所述垂直移动换向器传动连接的传动链条;以及
26、与所述传动链条传动连接的单排链轮,所述单排链轮通过单排链轮轴承座集成于所述垂直移动结构承载主体;
27、所述单排链轮通过关节轴承传动连接有垂直移动丝杠,且所述垂直移动丝杠上连接有垂直移动驱动丝母;
28、两侧的所述垂直移动驱动丝母连接有导向横梁,且所述导向横梁设置有对称的导向轴,所述垂直移动驱动丝母带动所述导向横梁沿竖直方向移动;
29、所述平台移动舱与所述导向横梁连接。
30、进一步的,所述纵向移动驱动结构具有位于其中一侧的所述纵向行走轮外侧的纵向移动距离检测组件。
31、进一步的,所述平台升降梯机构包括:
32、所述过渡平台和所述梯子;
33、所述过渡平台悬挂于厂房上方结构梁上,所述梯子一端与所述过渡平台的端部铰接,另一端倾斜向下延伸;
34、所述梯子的中部通过提升钢丝绳与厂房结构梁上的电动葫芦连接以通过所述电动葫芦调节所述梯子的倾斜角度;
35、所述过渡平台远离所述梯子一侧设置有过渡平台门。
36、进一步的,所述安全围栏被配置为能够沿水平方向伸缩滑动的结构。
37、在上述技术方案中,本发明提供的一种高空三维移动作业平台,具有以下有益效果:
38、本发明的三维移动作业平台可以带动平台移动舱在三维空间内移动,能够完全满足现阶段生产的各种不同车型产品的生产作业需求,安全性更高,设备纵向移动采用四轮同步驱动的结构保证了服务列车两侧的作业平台运行的同步性,梯子采用电动升降的方式,在非工作状态时收起,避免了占用车间场地地面作业空间,提高了场地利用率和作业效率。
技术特征:
1.一种高空三维移动作业平台,其特征在于,该三维移动作业平台包括:
2.根据权利要求1所述的一种高空三维移动作业平台,其特征在于,所述三维移动机构包括:
3.根据权利要求2所述的一种高空三维移动作业平台,其特征在于,所述纵横移动结构(10)包括:
4.根据权利要求3所述的一种高空三维移动作业平台,其特征在于,所述横向移动驱动结构(2)包括:
5.根据权利要求4所述的一种高空三维移动作业平台,其特征在于,所述垂直移动结构(3)包括:
6.根据权利要求3所述的一种高空三维移动作业平台,其特征在于,所述纵向移动驱动结构(1)具有位于其中一侧的所述纵向行走轮(107)外侧的纵向移动距离检测组件(109)。
7.根据权利要求1至6中任一项所述的一种高空三维移动作业平台,其特征在于,所述平台升降梯机构(5)包括:
8.根据权利要求1所述的一种高空三维移动作业平台,其特征在于,所述安全围栏(6)被配置为能够沿水平方向伸缩滑动的结构。
技术总结
本发明公开了一种高空三维移动作业平台,包括两组对称布置的三维移动机构,每组三维移动机构下部设置有平台移动舱,平台移动舱通过三维移动机构调节位置,两组三维移动机构的平台移动舱之间设置有安全围栏;位于其中一组三维移动机构侧面的平台升降梯机构,平台升降梯机构设有能够升降的梯子和与梯子上端连接的过渡平台。本发明的三维移动作业平台可以带动平台移动舱在三维空间内移动,能够完全满足现阶段生产的各种不同车型产品的生产作业需求,安全性更高,设备纵向移动采用四轮同步驱动的结构保证了服务列车两侧的作业平台运行的同步性,梯子采用电动升降的方式,在非工作状态时收起,避免了占用车间场地地面作业空间,提高了场地利用率和作业效率。
技术研发人员:刘显录,刘华,陈鑫,崔兆洋
受保护的技术使用者:中车长春轨道客车股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!