一种贴花纸机器人视觉处理系统及方法
本发明属于机器人,具体涉及一种贴花纸机器人视觉处理系统及方法。
背景技术:
1、随着经济发展生活水平提高,人们越来越重视产品质量及外观美化程度,而标签是产品信息和外观的最好体现之一。标签的粘贴主要依赖于自动贴标设备。在标签粘贴过程中,定位贴标位置的精度和贴标设备精度,直接决定了贴标设备的工作效率。而机器视觉系统的特点是提高生产的柔性和自动化程度,在一些不适合于人工作业的危险工作环境或人工视觉难以满足要求的场合,常用机器视觉来替代人工视觉;而且机器视觉可以在最快的生产线上对产品进行定位识别,并能保质保量的完成生产任务。
2、现有的视觉处理系统在贴花纸器人上开始使用,但是在应用中还不完善。现有的贴花纸机器人视觉处理系统存在一些不足之处:一是现有的贴花纸机器人视觉处理系统在大批量工业生产过程中,效率低,精度不高;二是现有的贴花纸机器人视觉处理系统对柔性花纸吸取,会造成皱褶,破损。因此,需要对其结构进行优化改进。
技术实现思路
1、本发明的目的在于克服传统技术中存在的上述问题,提供一种贴花纸机器人视觉处理系统及方法。
2、为实现上述技术目的,达到上述技术效果,本发明是通过以下技术方案实现:
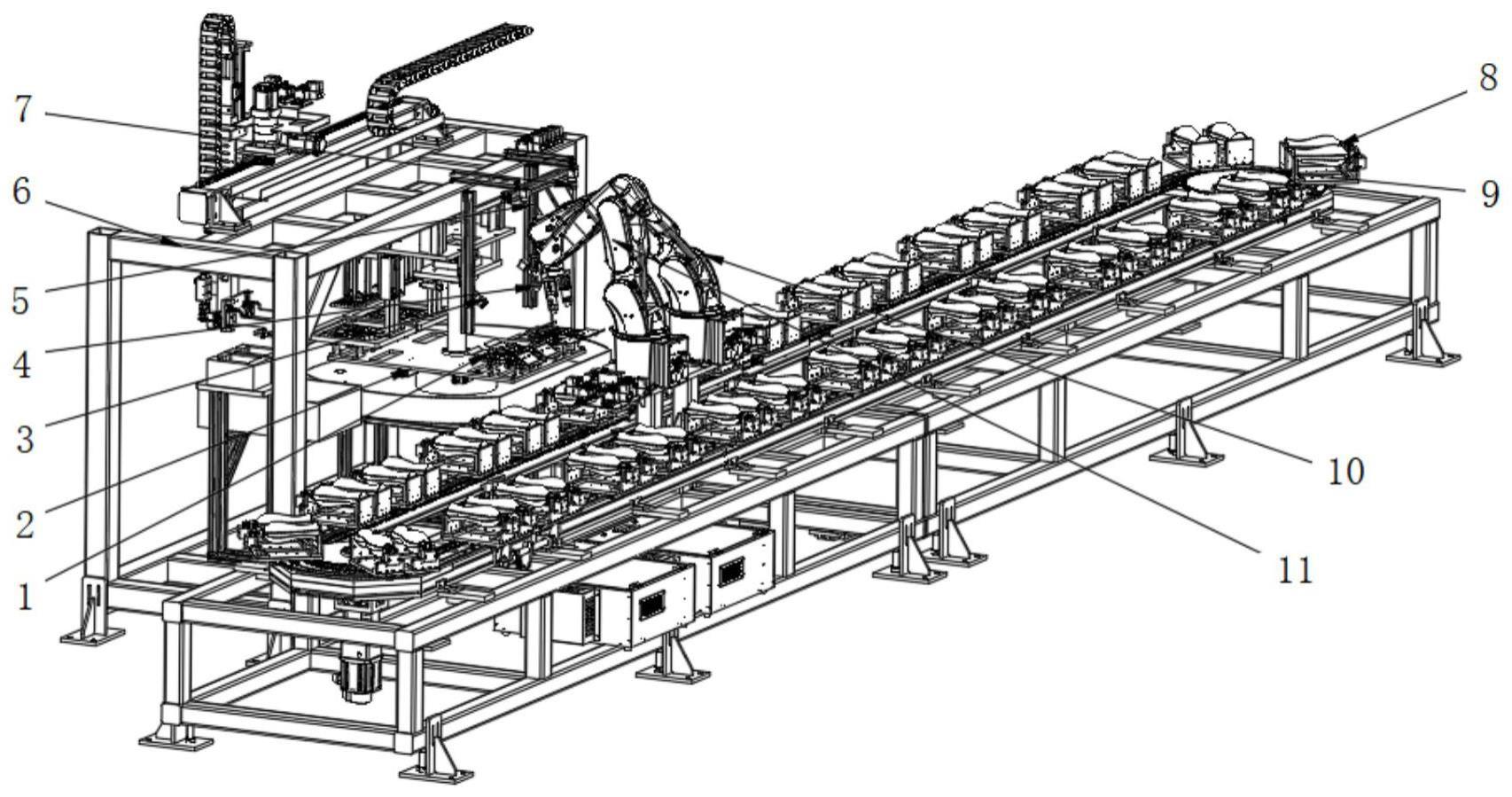
3、本发明提供一种贴花纸机器人视觉处理系统,包括设备工作台,所述设备工作台上安装有第一翻转机构和四个ccd视觉相机;所述第一翻转机构上安装有花纸料仓,四个ccd视觉相机分别为第一ccd视觉相机、第二ccd视觉相机、第三ccd视觉相机和第四ccd视觉相机;所述设备工作台的边缘处安装有用于装载待贴酒瓶的第二翻转机构,所述第二翻转机构上安装有第一六轴机器人和第二六轴机器人;所述第一六轴机器人和第二六轴机器人能够在花纸料仓中取花纸,然后贴在第二翻转机构装载的待贴酒瓶上,所述第一六轴机器人和第二六轴机器人交替工作。
4、进一步地,上述贴花纸机器人视觉处理系统中,所述第一翻转机构的上方固定花纸料仓,所述花纸料仓通过夹具来固定花纸,并通过第一翻转机构更换花纸。
5、进一步地,上述贴花纸机器人视觉处理系统中,所述第二翻转机构通过伺服电机带动链轮,从而更换放置在第二翻转机构顶部的待贴酒瓶。
6、进一步地,上述贴花纸机器人视觉处理系统中,所述第一六轴机器人的第一旋转轴上安装有能够上下移动的第一气缸和第二气缸,所述第一气缸的活动端安装有第一气嘴,所述第二气缸的活动端安装有第二气嘴,所述第一气嘴和第二气嘴能够通过气阀部件的动作来实现吸取花纸和贴花纸操作。
7、进一步地,上述贴花纸机器人视觉处理系统中,所述第二六轴机器人的第二旋转轴上安装有能够上下移动的第三气缸和第四气缸,所述第三气缸的活动端安装有第三气嘴,所述第四气缸的活动端安装有第四气嘴,所述第三气嘴和第四气嘴能够通过气阀部件的动作来实现吸取花纸和贴花纸操作。
8、进一步地,上述贴花纸机器人视觉处理系统中,四个气嘴的末端均安装有具有良好刚性和定位功能的过滤钢网,所述过滤钢网上方安装有过滤尼龙网,能够减缓取画纸的瞬间冲击,避免花纸破损褶皱,同时也不易造成花纸贴偏。
9、进一步地,上述贴花纸机器人视觉处理系统中,ccd视觉相机进行拍照后,上传上位机,采用花纸圆心算法处理进行图像分析;花纸圆心算法处理采用最小方差迭代圆拟合算法:极坐标下将拟合圆的圆心坐标设为(m,α),圆上点坐标为(θi,ρi),其中i为得到的离散点序号;极坐标系下圆的方程为ρ2i-2miρicos(α-θi)+m2=r2;为求得初始m,α,参照最小二乘圆拟合方法:
10、
11、
12、将求得的(m,α)作为花纸的拟合圆心坐标。
13、本发明还提供一种贴花纸机器人视觉处理方法,基于上述的贴花纸机器人视觉处理系统实现,该方法包括如下步骤:
14、s1、第一翻转机构将花纸运送到待拍照位置,等待稳定后,由传感器触发第一ccd视觉相机和第二ccd视觉相机拍照,采集花纸料仓(1)里花纸位置信息;
15、s2、上位机处理相机采集的图片,判断花纸料仓是否有花纸,如果没有花纸,返回步骤s1;若有花纸,第一六轴机器人和第二六轴机器人根据位置信息取花纸;
16、s3、第二翻转机构将待贴酒瓶运送到待拍照位置,传感器触发第三ccd视觉相机和第四ccd视觉相机进行采集待贴酒瓶(9)的位置信息;
17、s4、上位机处理视觉相机采集的图片,判断待贴酒瓶是否已贴花纸,若已贴花纸,将重复步骤s3;否则,第一六轴机器人和第二六轴机器人根据酒瓶位置信息进行贴花纸;
18、s5、贴花纸工作结束,第二翻转机构运送新的待贴酒瓶。
19、本发明的有益效果是:
20、1、本发明贴花纸机器人视觉处理系统设计合理,待贴酒瓶和花纸在翻转机构下依次运送到固定位置,然后由ccd视觉相机进行拍照,上传上位机,采用最小方差迭代圆拟合算法进行图像分析,快速准确获得相关位置信息,使之准确且稳定进行取花纸,贴花纸动作,机器人末端有两个气嘴,可以同时进行俩个花纸作业,从而达到高效流水线生产。
21、2、本发明贴花纸机器人视觉处理系统在设备工作台顶部固定安装视觉相机,对花纸和代替酒瓶进行采集位置信息,从而使贴花效果更精准。对表面的图像进行识别,判断有料无料现象,从而翻转机构适时进行补料。
22、3、本发明贴花纸机器人视觉处理系统中气嘴部分,具有吸取柔性湿花纸功能,气嘴末端可以减缓取画纸的瞬间冲击,避免花纸破损褶皱,同时也不易造成花纸贴偏。
23、当然,实施本发明的任一产品并不一定需要同时达到以上的所有优点。
技术特征:
1.一种贴花纸机器人视觉处理系统,包括设备工作台(6),其特征在于:所述设备工作台(6)上安装有第一翻转机构(2)和四个ccd视觉相机;所述第一翻转机构(2)上安装有花纸料仓(1),四个ccd视觉相机分别为第一ccd视觉相机(5)、第二ccd视觉相机(7)、第三ccd视觉相机(3)和第四ccd视觉相机(4);所述设备工作台(6)的边缘处安装有用于装载待贴酒瓶(9)的第二翻转机构(8),所述第二翻转机构(8)上安装有第一六轴机器人(11)和第二六轴机器人(10);所述第一六轴机器人(11)和第二六轴机器人(10)能够在花纸料仓(1)中取花纸,然后贴在第二翻转机构(8)装载的待贴酒瓶(9)上,所述第一六轴机器人(11)和第二六轴机器人(10)交替工作。
2.根据权利要求1所述的贴花纸机器人视觉处理系统,其特征在于:所述第一翻转机构(2)的上方固定花纸料仓(1),所述花纸料仓(1)通过夹具来固定花纸,并通过第一翻转机构(2)更换花纸。
3.根据权利要求2所述的贴花纸机器人视觉处理系统,其特征在于:所述第二翻转机构(8)通过伺服电机带动链轮,从而更换放置在第二翻转机构(8)顶部的待贴酒瓶(9)。
4.根据权利要求3所述的贴花纸机器人视觉处理系统,其特征在于:所述第一六轴机器人(10)的第一旋转轴(101)上安装有能够上下移动的第一气缸(102)和第二气缸(103),所述第一气缸(102)的活动端安装有第一气嘴(104),所述第二气缸(103)的活动端安装有第二气嘴(105),所述第一气嘴(104)和第二气嘴(105)能够通过气阀部件的动作来实现吸取花纸和贴花纸操作。
5.根据权利要求4所述的贴花纸机器人视觉处理系统,其特征在于:所述第二六轴机器人(11)的第二旋转轴(111)上安装有能够上下移动的第三气缸(112)和第四气缸(113),所述第三气缸(112)的活动端安装有第三气嘴(114),所述第四气缸(113)的活动端安装有第四气嘴(115),所述第三气嘴(114)和第四气嘴(115)能够通过气阀部件的动作来实现吸取花纸和贴花纸操作。
6.根据权利要求5所述的贴花纸机器人视觉处理系统,其特征在于:四个气嘴的末端均安装有具有良好刚性和定位功能的过滤钢网(106),所述过滤钢网(106)上方安装有过滤尼龙网(107),能够减缓取画纸的瞬间冲击,避免花纸破损褶皱,同时也不易造成花纸贴偏。
7.根据权利要求1所述的贴花纸机器人视觉处理系统,其特征在于,ccd视觉相机进行拍照后,上传上位机,采用花纸圆心算法处理进行图像分析;花纸圆心算法处理采用最小方差迭代圆拟合算法:极坐标下将拟合圆的圆心坐标设为(m,α),圆上点坐标为(θi,ρi),其中i为得到的离散点序号;极坐标系下圆的方程为ρ2i-2miρicos(α-θi)+m2=r2;为求得初始m,α,参照最小二乘圆拟合方法:
8.一种贴花纸机器人视觉处理方法,基于权利要求1-7任一项所述的贴花纸机器人视觉处理系统实现,其特征在于,该方法包括如下步骤:
技术总结
本发明属于机器人技术领域,具体涉及一种贴花纸机器人视觉处理系统及方法。本发明贴花纸机器人视觉处理系统设计科学合理,其中花纸由第一翻转机构更换到待拍照的位置,由第一CCD视觉相机,第三CCD视觉相机进行花纸图像摄取扫描,通过最小方差迭代圆拟合算法求出花纸圆心,再将花纸位置信息分别发送到第一六轴机器人和第二六轴机器人进行取花纸;第二CCD视觉相机,第四CCD视觉相机对待贴酒瓶位置进行拍照分析,并将其位置信息分别发送到第一六轴机器人,第二六轴机器人进行贴花纸作业;机器人末端具有特殊气嘴,柔性湿花纸贴完过后不会破损褶皱且偏移,再由第二翻转机构更换待贴酒瓶,以此实现高效的流水作业。
技术研发人员:张良安,黄从胜,钟伟铭,桂文珺,李绪吕德
受保护的技术使用者:安徽工业大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!