包边位置、方式及管带扭转方向检测、纠偏方法及装置与流程
本技术涉及管带机,特别涉及一种包边位置、方式及管带扭转方向检测、纠偏方法及装置。
背景技术:
1、管带式输送机是在普通带式输送机的基础上发展起来的一种新型带式输送机,它是将特殊输送带由托辊导向,由槽型逐渐变成管状,将输送物料密闭在圆管内,从而在整个输送线路中实现封闭输送的设备。如图5所示,皮带的两条侧边在卷起时会有一定程度的重叠,重叠处即为包边。管带机的管带一般较长,从几百米到数千米不等,由于管带的托辊长期运行会发生跑偏,导致管带发生扭转(扭管);由于管带运行速度较快,当管带发生扭管后,管带的包边位置易碰撞到其他设备,导致包边位置发生撕边,而撕边严重的不仅会导致运送物料的漏料,而且在皮带尾部展开段发生叠带事故,甚至撕裂断带,严重影响管带机的正常运行。目前现有技术中无法对管带扭转情况进行实时监测,只能在管带发生扭转后停机,通过测量管带扭转的弧长来计算管带的扭转角度,从而计算出需要调整的托辊一端的偏移量。这是一种事故后的补救措施,需要停机处理,延长了输送时间,降低了输送效率。
技术实现思路
1、本技术提供一种包边检测方法,解决了现有技术中需要停机确认管带扭转情况的技术问题。
2、为了达到上述目的,本技术实施例采用的技术方案如下:
3、在第一方面的实施例中,本技术提供了一种包边检测方法,沿管带周向均匀的配置若干距离传感器,若干所述距离传感器朝向所述管带;
4、所述包边位置检测方法包括:
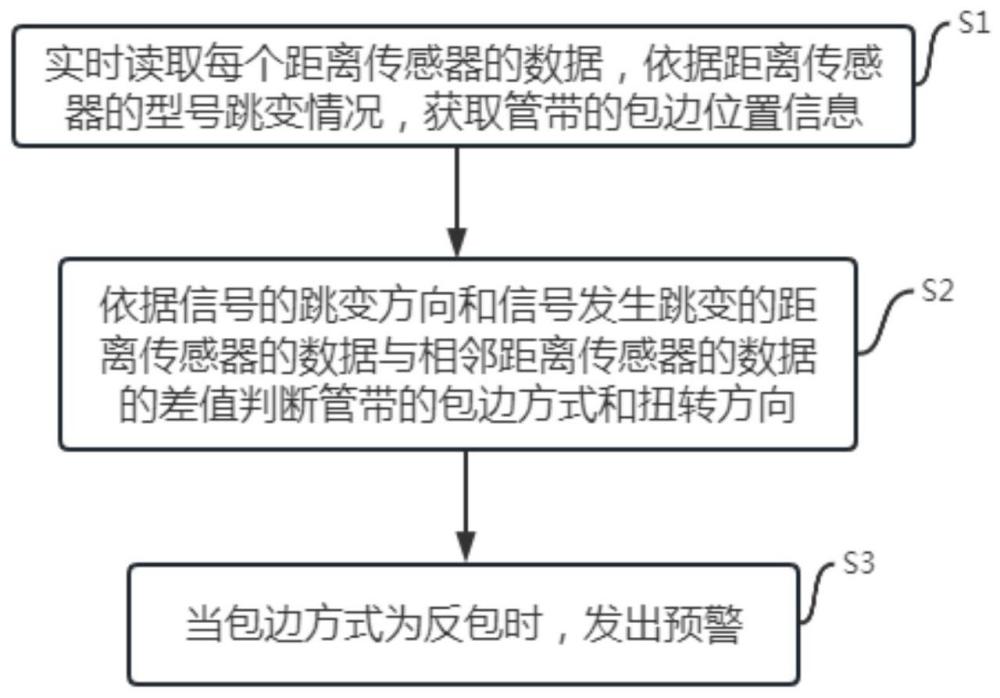
5、管带机运行时,实时读取每个所述距离传感器的数据,依据所述距离传感器的信号跳变情况,获取所述管带的包边位置信息。
6、本技术沿管带周向均匀的配制若干朝向管带方向的距离传感器。管带机运行时,实时读取每个距离传感器的数据,根据传感器的信号跳变情况获取管带的包边位置信息。包边位置的改变能够反应管带的扭转情况,本技术通过距离传感器的数据实时监控包边位置,进而能够实时掌握管带扭转情况,解决了现有技术中需要停机确认管带扭转情况的技术问题。
7、在某些实施方式中,所述距离传感器中包括若干两两以所述管带垂直于地面的半径为对称轴位置对称的所述距离传感器,将位于所述对称轴一侧的所述距离传感器作为第一传感器,将位于所述对称轴另一侧的所述距离传感器作为第二传感器;
8、所述包边检测方法还包括:
9、在所述管带机运行前,读取每个所述第一传感器和所述第二传感器的数据;
10、计算每个所述第一传感器和与所述第一传感器位置对称的所述第二传感器的数据差值;
11、找出所述差值的绝对值最大的一组,判断所述包边位于所述绝对值最大的一组中所述数据较小的所述距离传感器的对应位置。
12、在某些实施方式中,所述管带的包边位置的获取过程包括:
13、针对单一所述距离传感器,间隔预设时长读取所述距离传感器的数据;
14、计算当前所述数据与前一次所述数据的差值,作为第一差值;
15、当所述第一差值的绝对值大于距离阈值时,判断所述距离传感器的信号发生跳变,所述包边处于所述距离传感器的对应位置;
16、重复上述步骤,依据每个所述距离传感器的数据判断所述包边位置。
17、在第二方面的实施例中,本技术提供一种管带扭转方向及包边方式检测方法,包括:
18、依据如前所述的包边位置检测方法获取所述包边位置信息;
19、依据所述信号的跳变方向和信号发生跳变的所述距离传感器的数据与相邻所述距离传感器数据的差值判断所述管带的包边方式和扭转方向;
20、当所述包边方式为反包时,发出预警。
21、在某些实施方式中,所述包边方式和所述扭转方向的判断过程包括:
22、将信号发生跳变的所述距离传感器作为第一距离传感器,将与所述第一距离传感器逆时针相邻的所述距离传感器作为第二距离传感器,将与所述第一距离传感器顺时针相邻的所述距离传感器作为第三距离传感器;当所述第一距离传感器的信号发生跳变时,将所述第一距离传感器发生所述跳变时的数据记为第一数据;读取所述第二距离传感器的数据,作为第二数据,读取所述第三距离传感器的数据,作为第三数据;
23、计算所述第二数据与所述第一数据的差值,作为第二差值;
24、计算所述第三数据与所述第一数据的差值,作为第三差值;
25、判断所述跳变的方向,并比较所述第二差值的绝对值和所述第三差值的绝对值;当所述跳变的方向为由大变小,且所述第二差值的绝对值大于所述第三差值的绝对值时,所述包边方式为反包,所述扭转方向为逆时针;当所述跳变的方向为由大变小,且所述第二差值的绝对值小于所述第三差值的绝对值时,所述包边方式为正包,所述扭转方向为顺时针;当所述跳变的方向为由小变大,且所述第二差值的绝对值大于所述第三差值的绝对值时,所述包边方式为正包,所述扭转方向为逆时针;当所述跳变的方向为由小变大,且所述第二差值的绝对值小于所述第三差值的绝对值时,所述包边方式为反包,所述扭转方向为顺时针。
26、在第三方面的实施例中,本技术提供一种管带纠偏方法,包括:
27、在管带侧面设置纠偏机构,所述纠偏机构包括纠偏辊,所述纠偏辊与所述管带侧面抵接,所述纠偏辊的转动方向与所述管带的运动方向相同;设定包边目标位置;
28、通过如前所述的管带扭转方向及包边方式检测方法获取所述包边位置和所述扭转方向;
29、当所述包边位置与所述包边目标位置的扭转角度差超过角度阈值时,依据所述扭转角度差和所述扭转方向调整所述纠偏辊的角度,对所述管带进行纠偏。
30、在某些实施方式中,对所述管带进行纠偏的过程包括:
31、将所述包边目标位置与当前所述包边位置的位置差结合所述扭转方向换算成所述扭转角度差;
32、将所述扭转角度差与所述角度阈值进行比较,当所述角度差大于所述角度阈值时,开始纠偏;
33、以所述包边经过相邻两个所述距离传感器的时间间隔作为所述包边的扭转时长,以相邻两个所述距离传感器的角度差除以所述扭转时长,得到扭转速度;
34、结合所述扭转角度差与所述扭转速度调整所述纠偏辊的角度,使所述纠偏辊的轴线向所述扭转方向倾斜,对所述管带进行纠偏。
35、在某些实施方式中,所述扭转角度差的计算过程包括:
36、依次为若干所述距离传感器编号,分别为0号距离传感器、1号距离传感器至n号距离传感器;将与所述包边目标位置对应的所述距离传感器编号记为i,将当前所述包边位置对应的所述距离传感器编号记为j,则当所述扭转方向与所述距离传感器的编号方向相同时,所述扭转角度差δ通过下式计算:
37、
38、当所述扭转方向与所述距离传感器的编号方向相反时,所述扭转角度差δ通过下式计算:
39、
40、在某些实施方式中,所述纠偏辊的角度通过下列方法确定:
41、将圆周划分为若干角度区间,为若干所述角度区间赋予不同的权重;
42、将所述扭转速度划分为若干速度区间,为若干所述速度区间赋予不同的权重;
43、以所述扭转角度差所在的所述角度区间的权重乘以所述扭转速度所在的所述速度区间的权重,以得到的结果选择所述纠偏辊的角度,所述纠偏辊的倾斜方向与所述扭转速度的方向相反。
44、在第四方面的实施例中,本技术提供一种管带纠偏装置,包括:
45、控制单元,用于使用如前所述的管带纠偏方法进行管带纠偏;
46、包边检测装置,包括:支架;固定板,装配在所述支架上,所述固定板上开有通孔,用于容纳管带通过;若干所述距离传感器,装配在所述固定板上,若干所述距离传感器均匀的分布在所述通孔的边缘;所述距离传感器与所述控制单元连接;
47、所述纠偏机构,装配在所述支架上,所述纠偏机构还包括驱动机构,所述驱动机构与所述控制单元连接,能够在所述控制单元的控制下调整所述纠偏辊的角度。
48、本技术的实施方式的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实施方式的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!