一种汽车座椅自动跨线转运的方法及系统与流程
本发明涉及座椅转运,尤其涉及一种汽车座椅自动跨线转运的方法及系统。
背景技术:
1、汽车座椅自动跨线转运系统是座椅输送线体分流及座椅投放的重要设备,在座椅输送线将座椅输送到位后,由机器人抓取座椅移动至座椅输送辅线,实现主、副驾座椅分流的功能。
2、汽车制造通常采用流水线生产方式,每个生产线负责特定的工序。然而,座椅作为汽车的重要组成部分,需要在不同的工序中进行安装和调整。为了提高生产效率和灵活性,跨线转运技术应运而生,可以将座椅从一个生产线转移到另一个生产线,避免了重复安装和调整的过程。汽车制造涉及多个工序,每个工序都有特定的任务和要求。座椅的安装和调整通常需要在不同的工序中完成,例如焊接、喷涂、装配等。通过跨线转运技术,可以将座椅在不同的工序之间进行传递,使得每个工序可以专注于自己的任务,提高生产效率和质量。
3、因此,如何设计既包含自动抓取、投放座椅、车型自动识别,又能占用空间小,工作效率高,精准落位和便于维修保养及不会造成主线设备停线停产的问题。
4、相关技术中,无法全自动完成汽车座椅跨线转运的技术问题尚未得到有效地解决方案。
技术实现思路
1、本发明的目的是提供一种汽车座椅自动跨线转运的方法及系统,以解决相关技术中无法全自动完成汽车座椅跨线转运的问题。
2、为了实现上述目的,本发明采用了如下技术方案:
3、一种汽车座椅自动跨线转运的方法,包括在座椅上粘贴识别码,依据识别码获取座椅信息,其中,座椅信息包括车型以及座椅类型;使用激光器检测座椅特征是否与座椅信息匹配,其中,激光器包括第一激光器以及第二激光器,座椅特征包括相同特征与相异特征,相同特征为主驾驶座椅与副驾驶座椅相同的特征,相异特征为主驾驶座椅与副驾驶座椅不同的特征;机器人依据线性直线导轨轴将座椅抓取并移动至放置位。
4、进一步设置为:依据座椅的形状获取座椅特征。
5、进一步设置为:第一激光器检测相同特征;第二激光器检测相异特征。
6、为了实现上述目的,本发明的另一方面采用了如下技术方案:
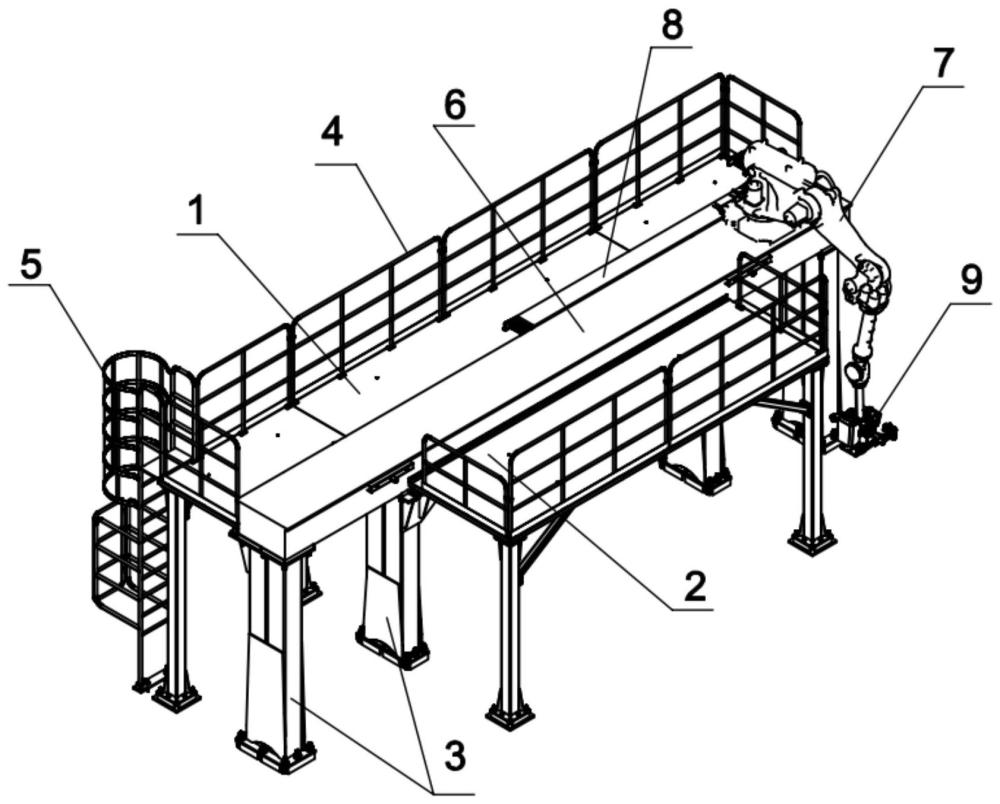
7、一种汽车座椅自动跨线转运的系统,包括:跨线钢平台以及维修防护平台,跨线钢平台的一侧设置有线性直线导轨轴,维修防护平台靠近线性直线导轨轴;线性直线导轨轴上设置有机器人,机器人沿线性直线导轨轴往复运动;机器人的端部设置有座椅抓手。
8、进一步设置为:在跨线钢平台上线性直线导轨轴的另一侧设置有防护栏以及直爬梯;维修防护平台靠近线性直线导轨轴的另一侧面设置有防护栏。
9、进一步设置为:跨线钢平台以及维修防护平台通过立柱支撑在地面上。
10、进一步设置为:线性直线导轨轴还包括拖链,拖链设置在线性直线导轨轴的侧面。
11、进一步设置为:座椅抓手包括主体框架,主体框架上设置靠背压板、翻转铲板、坐垫压板以及抱紧臂。
12、进一步设置为:坐垫压板固定连接在主体框架的底部;靠背压板以及翻转铲板固定连接在坐垫压板上;抱紧臂固定连接在主体框架的两侧。
13、进一步设置为:主体框架的背部还设置有气缸,气缸用于驱动抱紧臂。
14、相比于现有技术,本发明的有益技术效果为:
15、通过粘贴识别码,使跨线转运设备对汽车座椅进行识别,然后再通过两组激光器对汽车座椅进行二次识别,既可以防止人工上件错误和座椅输送过程中座椅未放置正常的情况,也可以用作车型判断或是二次车型判断使用,避免上位车型信息下发与接受信息不一致。本发明通过线性直线导轨轴对机器人进行控制,并且机器人通过座椅抓手对汽车座椅进行抓取。座椅抓手通过每个部件间的作用力与反作用力,提高座椅抓取的稳定性和抓取精度。
技术特征:
1.一种汽车座椅自动跨线转运的系统,其特征在于,包括:
2.根据权利要求1所述的一种汽车座椅自动跨线转运的系统,其特征在于,包括:
3.根据权利要求1所述的一种汽车座椅自动跨线转运的系统,其特征在于,包括:
4.根据权利要求1所述的一种汽车座椅自动跨线转运的系统,其特征在于,包括:
5.根据权利要求1所述的一种汽车座椅自动跨线转运的系统,其特征在于,包括:
6.根据权利要求5所述的一种汽车座椅自动跨线转运的系统,其特征在于,包括:
7.根据权利要求5所述的一种汽车座椅自动跨线转运的系统,其特征在于,包括:
8.一种汽车座椅自动跨线转运的方法,应用于权利要求1-7中任意一项所述的一种汽车座椅自动跨线转运的系统,其特征在于,包括:
9.根据权利要求8所述的一种汽车座椅自动跨线转运的方法,其特征在于,包括:
10.根据权利要求8所述的一种汽车座椅自动跨线转运的方法,其特征在于,包括:
技术总结
本发明公开了一种汽车座椅自动跨线转运的方法及系统。本发明涉及座椅转运技术领域,该发明包括:跨线钢平台以及维修防护平台,跨线钢平台的一侧设置有线性直线导轨轴,维修防护平台靠近线性直线导轨轴;线性直线导轨轴上设置有机器人,机器人沿线性直线导轨轴往复运动;机器人的端部设置有座椅抓手。通过本发明,解决了相关技术中无法全自动完成汽车座椅跨线转运的问题。
技术研发人员:高建超,刘增昌,卢迎秋
受保护的技术使用者:中国汽车工业工程有限公司
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!