一种叉车防掉落叉臂控制系统及其控制方法
本发明属于工程机械,具体涉及一种叉车防掉落叉臂控制系统及其控制方法。
背景技术:
1、在双碳减排的大背景下,绿色智造与电动化已经成为工程机械产业转型升级的重点方向,企业相继加码电动化布局,已累计推出近百款覆盖工程机械全系列的电动化产品。而随着叉车的发展,安全问题也愈发受到重视,叉车搬运货物在侧坡上行驶时,此时货车倾斜,相应的货物也会倾斜,增大货物掉落的风险。
技术实现思路
1、本发明的目的是提供一种叉车防掉落叉臂控制系统及其控制方法,通过液压伺服系统实现叉车两侧叉臂的单独控制,控制系统根据两侧叉臂的倾斜角度实现叉臂的独立调整,使得货物重新保持水平,防止货物倾斜而导致倾翻事故的发生。
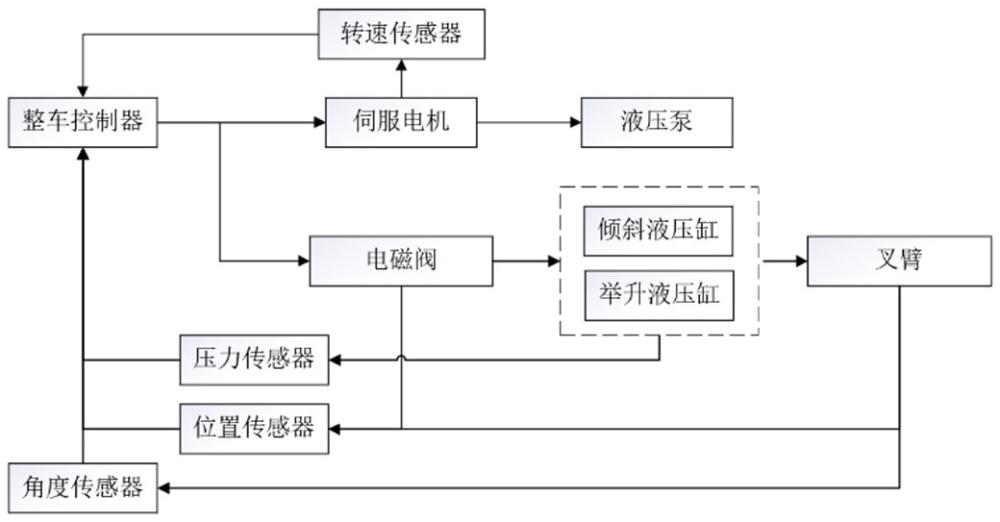
2、为了实现上述目的,本发明所采用的技术方案是:一种叉车防掉落叉臂控制系统,包括整车控制器,用于接收反馈元件的反馈信号并进行处理,以及根据处理结果控制执行元件动作;
3、反馈元件,包括角度传感器、转速传感器和压力传感器;所述角度传感器置于左叉臂和右叉臂处,用于采集对应叉臂的角度信息;所述转速传感器置于液压系统的伺服电机处,用于采集伺服电机的实时转速;所述压力传感器置于控制每个叉臂升降的举升油缸处,用于采集举升油缸的油液压力;
4、执行元件,用于控制所控制对象的动作,执行元件包括液压系统的电磁阀和伺服电机,控制对象包括实现叉臂升降的举升油缸以及液压系统的液压泵;
5、所述左叉臂和右叉臂分别由对应的举升油缸控制升降。
6、所述反馈元件还包括位置传感器,位置传感器设置在所述电磁阀、左叉臂和右叉臂处,用于采集所述电磁阀开度和对应叉臂与地面的距离。
7、所述的左叉臂和右叉臂分别固定在左叉臂升降框和右叉臂升降框上,左叉臂升降框和右叉臂升降框分别沿叉车门架的左右两侧导轨升降。
8、左叉臂升降框和右叉臂升降框分别和一个举升油缸的活塞连接。
9、左叉臂升降框和右叉臂升降框分别和一个升降机构连接,两个升降机构由相应的举升油缸独立控制。
10、所述升降机构为链条链轮组件,包括相配合的链条和链轮,所述举升油缸的活塞与链轮连接,推动链轮升降,所述链条一端固定在叉车上,另一端固定在对应的叉臂升降框上。
11、一种叉车防掉落叉臂控制方法,该方法采用所述的控制系统,包括如下步骤:
12、s1、当电动叉车行驶在侧向坡时,此时车身倾斜,角度传感器将采集到的叉臂倾斜角度反馈给整车控制器,整车控制器计算出左叉臂和右叉臂的高度差,进而得到每个叉臂的叉臂调整数据,生成左叉臂和右叉臂对应举升油缸调整到位所需的压力目标值和液压系统中伺服电机的转速目标值;
13、s2、整车控制器对液压系统进行调整,消除左叉臂和右叉臂之间的高度差;
14、s21、整车控制器根据转速传感器反馈的伺服电机实时转速与转速目标值比较,生成转速偏差值,再获得转速调整值,用于调整伺服电机的转速,实现电机转速的精确控制,此控制过程为闭环反馈控制,直至伺服电机转速达到转速目标值,伺服电机带动液压泵转动为液压系统供油;
15、s22、分别与左叉臂和右叉臂所对应的举升油缸的压力传感器将举升油缸的实时压力值反馈给控制单元,整车控制器根据实时压力值与压力目标值比较生成压力偏差值,再获得压力调整值,用于调整电磁阀的开度,从而控制两个举升油缸的活塞杆伸出或缩回,带动左叉臂和右叉臂升降,此控制过程为闭环反馈控制,直至两个举升油缸的压力达到压力目标值。
16、整车控制器利用pid算法生成转速调整值和压力调整值。
17、本发明的有益效果是:本发明在左右叉臂独立升降的基础上,利用液压伺服系统,分别控制左叉臂和右叉臂的升降,从而在叉车整体出现侧倾时,可以及时的调整两个叉臂的位置,消除两个叉臂的高度差,从而恢复货物的水平,防止货物因倾斜而导致倾翻事故的发生。
技术特征:
1.一种电动叉车防掉落叉臂控制系统,其特征在于:包括整车控制器,用于接收反馈元件的反馈信号并进行处理,以及根据处理结果控制执行元件动作;
2.根据权利要求1所述的电动叉车防掉落叉臂控制系统,其特征在于:所述反馈元件还包括位置传感器,位置传感器设置在所述电磁阀、左叉臂和右叉臂处,用于采集所述电磁阀开度和对应叉臂与地面的距离。
3.根据权利要求1所述的电动叉车防掉落叉臂控制系统,其特征在于:所述的左叉臂和右叉臂分别固定在左叉臂升降框和右叉臂升降框上,左叉臂升降框和右叉臂升降框分别沿叉车门架的左右两侧导轨升降。
4.根据权利要求3所述的电动叉车防掉落叉臂控制系统,其特征在于:左叉臂升降框和右叉臂升降框分别和一个举升油缸的活塞连接。
5.根据权利要求3所述的电动叉车防掉落叉臂控制系统,其特征在于:左叉臂升降框和右叉臂升降框分别和一个升降机构连接,两个升降机构由相应的举升油缸独立控制。
6.根据权利要求5所述的电动叉车防掉落叉臂控制系统,其特征在于:所述升降机构为链条链轮组件,包括相配合的链条和链轮,所述举升油缸的活塞与链轮连接,推动链轮升降,所述链条一端固定在叉车上,另一端固定在对应的叉臂升降框上。
7.一种电动叉车防掉落叉臂控制方法,其特征在于:该方法采用如权利要求1-6任一项所述的控制系统,包括如下步骤:
8.根据权利要求7所述的一种电动叉车防掉落叉臂控制方法,其特征在于:整车控制器利用pid算法生成转速调整值和压力调整值。
技术总结
本发明涉及一种叉车防掉落叉臂控制系统及其控制方法,控制系统包括整车控制器,用于接收反馈元件的反馈信号并进行处理以及根据处理结果控制执行元件动作;反馈元件包括角度传感器、转速传感器和压力传感器;角度传感器置于左叉臂和右叉臂处,采集对应叉臂的角度信息;转速传感器置于伺服电机处,用于采集伺服电机的实时转速;压力传感器置于控制每个叉臂升降的举升油缸处,采集举升油缸的油液压力;执行元件包括液压系统的电磁阀和伺服电机,执行元件的控制对象包括举升油缸和液压泵;左叉臂和右叉臂分别由对应的举升油缸控制升降;所述控制方法根据两侧叉臂的倾斜角度实现叉臂的独立调整,恢复货物的水平,防止货物倾斜掉落。
技术研发人员:杨雪勇,吴静波,郭志军,郭征,杨月飞,迁花磊,王红垚
受保护的技术使用者:河南科技大学
技术研发日:
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!