一种物料搬运的交互方法、系统和装置与流程
本发明涉及仓库物料的运输控制,特别是基于wcs、agvs和安全光栅的一种物料搬运的交互方法、系统和装置。
背景技术:
1、随着工厂自动化水平以及现代物流技术的不断提高,对于仓库管理控制系统(wcs)的要求越来越高,尤其对于制造型企业来说,每天有大量的货物入库与出库,仅仅依靠传统的人工分配方式来完成读取物料单、相应货物出入库以及库位内货物的安全工作,效率较低。通过仓库管理控制系统和自动导向搬运车系统(agvs)相结合能有效提高物料搬运的效率。
2、安全光栅适用于多种场景,常见于机械设备、工业自动化生产线等,可以有效地保护工作环境的安全,防止意外伤害的发生。当工业自动化场景使用安全光栅并与wcs、agvs相结合时,需要在不影响自动化设备的情况下,kiva机器人进出工作区时光栅仍发挥保护作用,而安装光栅系统无法直接与wcs、agvs直接进行交互,安全光栅无法分辨出人和物料,kiva机器人在不装车时高度较低,可以适当调整光栅高度使其不接触光栅进出工作区,但在装车进出光栅时会引发工作区内设备急停报警,影响自动化设备的运作。
技术实现思路
1、针对上述机器人在进出光栅时影响工作区内自动化设备运作的问题,本发明提供一种物料搬运的交互方法、系统和装置,建立仓库控制系统(wcs)、搬运车系统(agvs)和安全光栅的交互关系,既保留安全光栅的防护作用,又不影响自动化设备的运作。
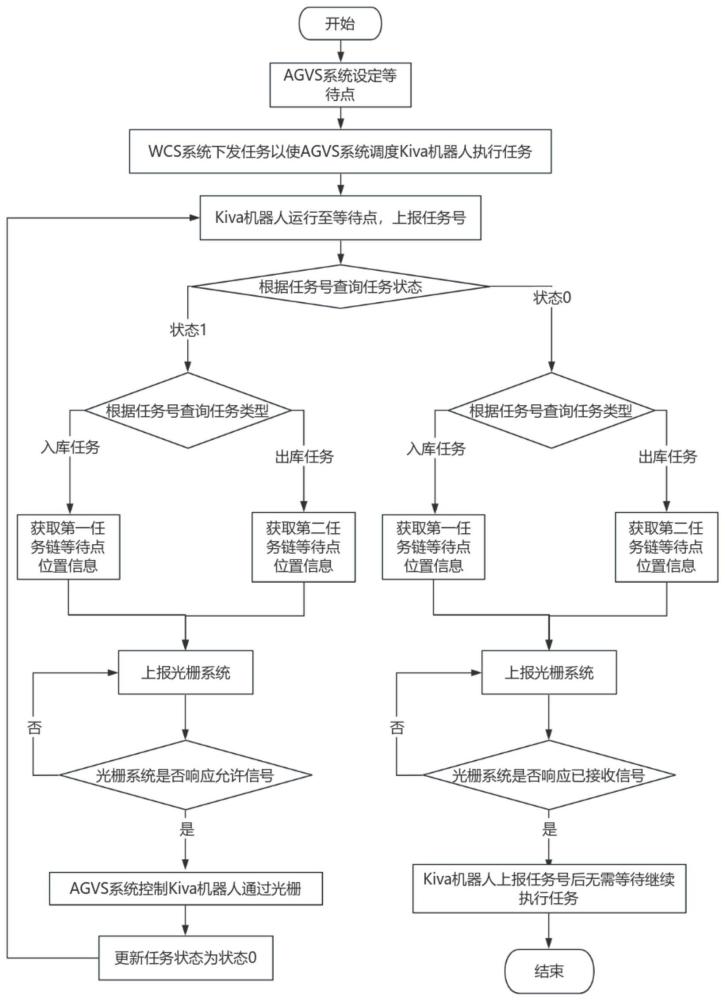
2、为实现上述目的,本发明提供以下技术方案:一种物料搬运的交互方法,由仓库控制系统执行如下步骤,包括:
3、接收上报的任务号;
4、根据任务号确定任务状态和任务类型,并上报光栅系统,其中:当确定任务状态为状态1时,根据任务类型获取等待点并上报光栅系统以使光栅系统打开对应等待点位置的光栅并响应允许信号;
5、下发允许信号,并将任务状态更新为状态0;
6、在接收任务号并确定任务状态为状态0时,根据任务类型获取等待点上报光栅系统。
7、作为本发明的进一步改进,所述根据任务号确定任务状态和任务类型,包括:
8、所述任务号为搬运车系统调度机器人运行至设定的等待点时上报当前任务的任务编号;
9、根据任务号查询任务状态和任务类型,其中任务状态包括装车的状态1和空车的状态0,所述任务类型包括入库任务和出库任务。
10、作为本发明的进一步改进,所述根据任务类型获取等待点包括:
11、所述等待点包括设置在光栅靠近工作区一侧的若干第一任务链等待点和设置在光栅靠近平面库一侧的若干第二任务链等待点;
12、当任务类型为入库任务时,获取第一任务链等待点的位置信息;
13、当任务类型为出库任务时,获取第二任务链等待点的位置信息。
14、作为本发明的进一步改进,所述上报光栅系统包括:
15、当任务状态为状态1时,上报光栅系统后未收到响应信号或响应拒绝信号时,重复上报,直至收到响应允许信号;
16、当任务状态为状态0时,上报光栅系统并确定光栅系统是否已接收,当光栅系统未接收时,重复上报,直至光栅系统接收。
17、另一方面,本发明还提供以下技术方案:一种物料搬运的交互方法,由搬运车系统执行如下步骤,包括:
18、接收仓库控制系统下发的任务并调度机器人执行任务;
19、在机器人运行至设定的等待点时上报任务号;
20、当任务状态为状态1时,等待允许信号,控制机器人通过光栅;
21、当任务状态为状态0时,上报任务号后无需等待继续执行任务。
22、作为本发明的进一步改进,还包括:
23、接收允许信号,控制机器人通过光栅,并更新任务状态为状态0;
24、在通过光栅后控制机器人运行至光栅另一侧的等待点,上报任务号,无需等待继续执行任务。
25、作为本发明的进一步改进,还包括设定等待点:
26、在多个光栅围成的工作区内设定若干卸货点,并标记为第一任务链等待点;
27、在光栅靠近平面库一侧设定若干运输点,并标记为第二任务链等待点;
28、所述第一任务链等待点和第二任务链等待点用于在机器人运行至点位置时通过端口发送位置信息。
29、另一方面,本发明还提供以下技术方案,一种物料搬运的交互方法,由光栅系统执行如下步骤,包括:
30、接收上报的任务状态和等待点;
31、根据任务状态控制对应等待点位置的光栅的开或关,其中:
32、当任务状态为状态1时,控制对应等待点位置的光栅打开,并响应允许信号;
33、当任务状态为状态0时,记录通过信息和将对应等待点位置的已打开的光栅关合,并响应已接收信号。
34、另一方面,本发明还提供以下技术方案,一种物料搬运的交互系统,包括:
35、仓库控制系统,用于接收上报的任务号,根据任务号确定任务状态和任务类型,并上报光栅系统,以及用于根据光栅系统的响应信号,下发至搬运车系统;
36、搬运车系统,用于接收仓库控制系统下发的任务并调度机器人执行任务,在机器人运行至设定的等待点时向仓库控制系统上报任务号和控制机器人通过光栅;
37、光栅系统,用于接收仓库控制系统上报的任务状态和等待点,根据任务状态控制对应等待点位置的光栅的开或关。
38、另一方面,本发明还提供以下技术方案,一种物料搬运的交互装置,包括存储器和处理器,所述处理器通过调用所述存储器中存储的控制程序,以执行如上所述任一项的一种物料搬运的交互方法。
39、相较于现有技术,本发明具有以下有益效果:
40、本发明建立光栅系统与仓库控制系统(wcs)、搬运车系统(agvs)的交互关系,通过梳理机器人(kiva)执行任务的过程,在任务执行过程中调度各系统的控制,使得机器人在不影响自动化设备运作的情况下进出工作区,既保留安全光栅的防护作用和自动化运输搬运的便捷性,又不影响自动化设备的运作。
技术特征:
1.一种物料搬运的交互方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种物料搬运的交互方法,其特征在于,所述根据任务号确定任务状态和任务类型,包括:
3.根据权利要求2所述的一种物料搬运的交互方法,其特征在于,所述根据任务类型获取等待点包括:
4.根据权利要求1所述的一种物料搬运的交互方法,其特征在于,所述上报光栅系统包括:
5.一种物料搬运的交互方法,其特征在于,包括如下步骤:
6.根据权利要求5所述的一种物料搬运的交互方法,其特征在于,还包括:
7.根据权利要求5或6所述的一种物料搬运的交互方法,其特征在于,还包括设定等待点:
8.一种物料搬运的交互方法,其特征在于,包括如下步骤:
9.一种物料搬运的交互系统,其特征在于,包括:
10.一种物料搬运的交互装置,包括存储器和处理器,其特征在于:所述处理器通过调用所述存储器中存储的控制程序,以执行如权利要求1-8任一项所述的一种物料搬运的交互方法。
技术总结
本发明公开了一种物料搬运的交互方法、系统和装置,所述交互方法由仓库控制系统执行如下步骤,包括:接收上报的任务号;根据任务号确定任务状态和任务类型,并上报光栅系统,其中:当确定任务状态为状态1时,根据任务类型获取等待点并上报光栅系统以使光栅系统打开对应等待点位置的光栅并响应允许信号;下发允许信号,并将任务状态更新为状态0;在接收任务号并确定任务状态为状态0时,根据任务类型获取等待点上报光栅系统。本发明建立光栅系统与仓库控制系统、搬运车系统的交互关系,在任务执行过程中调度各系统,使得机器人在不影响自动化设备运作的情况下进出工作区,既保留安全光栅的防护作用和搬运的便捷性,又不影响自动化设备的运作。
技术研发人员:王冬莹,吴欣悦
受保护的技术使用者:珠海格力智能装备有限公司
技术研发日:
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!