一种大型起重船主钩运动测量系统和方法与流程
本发明涉及起重船,尤其涉及一种大型起重船主钩运动测量系统和方法。
背景技术:
1、大型起重船是水上施工的重要装备,从风电整体吊装到大节段桥梁整体抬吊到大型沉桩作业,都与大型起重设备密不可分,然而施工作业的效率与作业窗口的判断在其中起着至关重要的部分,而且主钩能否达到可吊装作业的摆动范围内就是其主要判断内容,现今对主钩的观测与作业可行性的判断主要凭借的人眼观测,而且是经验丰富的作业人员依靠目测和经验去判断主钩运动的幅度是否达到了作业的要求,这种观测手法较为普遍,但是存在较大的误差,往往判断会趋向保守判断的方向,同时存在较多的不可控性。传统大型起重船上智能化设备应用较少,随着科技发展,保证精度的前提下,测量将趋近于无人化,给作业人员以辅助决策,减少施工的劳动力,提高施工效率和窗口期。因此针对上述问题急需提供一种智能化测量系统与方法从事于大型起重船主钩运动测量。
技术实现思路
1、本发明要解决的技术问题在于针对现有技术中的缺陷,提供一种大型起重船主钩运动测量系统和方法,其不仅可以提供施工作业窗口期判断的智能辅助决策,也可以提供施工作业时吊物的状态监测,降低了人工的劳动量并增加的测量的精确度,实现了主钩6自由度的实时运动状态的测量,并生成主钩实时三维模型示意动画,同时可输入吊物与吊具参数,并生成主钩、吊具、吊物实时三维模型示意动画。
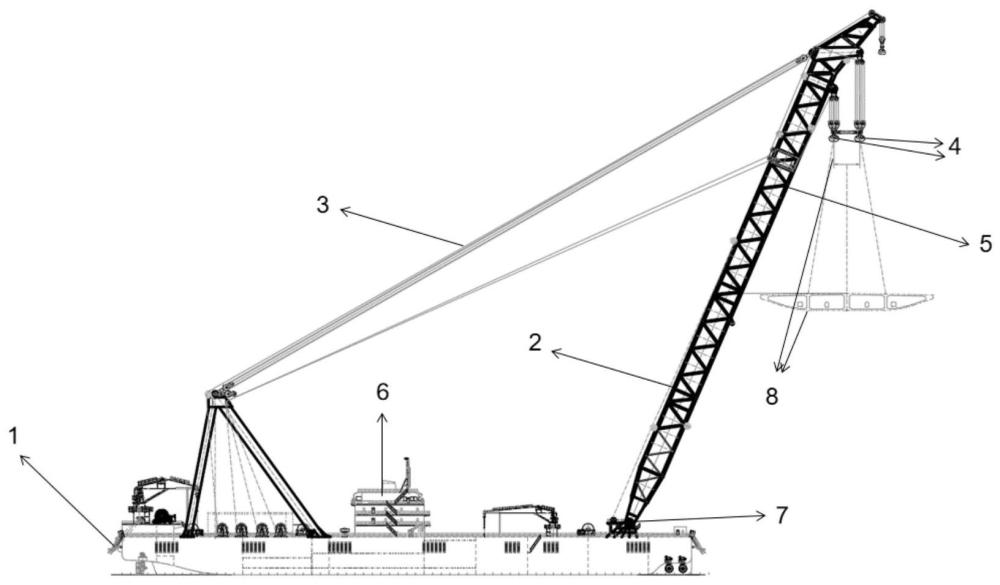
2、本发明解决其技术问题所采用的技术方案是:本发明提供一种大型起重船主钩运动测量系统,包括起重船体,所述包括起重船体上设置有臂架,所述臂架通过吊缆连接有主钩,所述臂架包括两个,每个臂架上设置有两个所述主钩,四个主钩呈矩形分布,每个臂架的横梁上固接有两台激光测距雷达,每个臂架的横梁上的两台激光测距雷达的中心与该臂架的横梁的中心的连线形成的夹角为60°,每个臂架上的两台激光测距雷达两个扇形视场组成了一个蝶形视场,所述蝶形视场的视场范围能够完全覆盖各种工况下所述主钩的运动空间。
3、在本发明的一种优选实施方案中,每个吊臂距离底座108m的横梁处安装两台激光测距雷达。
4、在本发明的一种优选实施方案中,每个臂架的横梁上通过安装卡箍连接有承台,所述承台上设置有两台激光测距雷达。
5、在本发明的一种优选实施方案中,所述臂架固定式臂架,所述臂架布置于船艏作业部位。
6、在本发明的一种优选实施方案中,所述吊缆一端与位于所述起重船体上的吊缆卷扬机连接、另一端与所述主钩连接。
7、本发明还公开了一种大型起重船主钩运动测量方法,基于四个所述激光测距雷达获取四个主钩的三维点云;基于三维点云获取四个主钩的点云三维前视图;基于点云三维前视图和目标检测框架fvnet算法获取主钩运动的三维坐标;基于主钩运动的三维坐标进行吊钩运动场的重构与可视化。
8、在本发明的一种优选实施方案中,具体步骤包括,当四个主钩处于空钩工况时,
9、s1,主控制台或者副控制台发送测量开始信号;
10、s2,激光测距雷达接受主控制台或者副控制台的信号,启动激光发射工作;
11、s3,激光测距雷达在水平与竖直范围内发射覆盖设计全范围内激光;
12、s4,激光测距雷达接收主钩反射回的激光,并处理分析反射回的信号;
13、s5,激光测距雷达将收集到的反射信号转化为空钩的水平与竖直方向上的位置信号;
14、s6,激光测距雷达将空钩的位置信号传输回主控制台和副控制台;
15、s7,主控制台和副控制台显示空钩的位置参数,并将信号处理成三维模型并在主控制台和副控制台面板中实时显示当前状态;
16、s8,精确观测出主钩6自由度的实时运动状态,为判断施工作业窗口期和预报危险情况提供主钩的智能辅助决策。
17、在本发明的一种优选实施方案中,智能辅助决策在激光测距雷达监控到空钩摆动与垂直轴夹角超过15°时报警,在主控制台和副控制台同时发出警报信息,提醒操作者主钩摆动幅度过大,需要调整船体、臂架与钢丝绳长度以减小主钩摆动。
18、在本发明的一种优选实施方案中,具体步骤包括,当四个主钩处于吊物工况时,
19、s1,主控制台或者副控制台发送测量开始信号;
20、s2,激光测距雷达接受主控制台或者副控制台的信号,启动激光发射工作;
21、s3,激光测距雷达在水平与竖直范围内发射覆盖设计全范围内激光;
22、s4,激光测距雷达接收主钩反射回的激光,并处理分析反射回的信号;
23、s5,激光测距雷达将收集到的反射信号转化为空钩的水平与竖直方向上的位置信号;
24、s6,激光测距雷达将空钩的位置信号传输回主控制台和副控制台;
25、s7,主控制台和副控制台显示空钩的位置参数,并将信号处理成三维模型并在主控制台和副控制台面板中实时显示当前状态,同时向主控制台或者副控制台面板中输入所吊物体和吊具的三维参数与主钩、吊具和所吊物体的相对位置,分析得到所吊物体的三维实时状态图;
26、s8,通过精确测量主钩6自由度的实时运动状态,计算得到吊物的6自由度的实时运动状态,给施工作业提供吊物的智能辅助决策。
27、在本发明的一种优选实施方案中,智能辅助决策在吊物时:
28、单臂架作业时,激光测距雷达监控到两个主钩与吊物整体摆动与垂直轴夹角超过5°时报警,在主控制台和副控制台同时发出警报信息,提醒操作者主钩摆动幅度过大,需要调整船体、臂架与钢丝绳长度以减小主钩摆动,或者将主钩与吊物下降到较低的位置;
29、双臂架作业时,激光测距雷达监控到四个主钩与吊物整体摆动与垂直轴夹角超过5°时报警,在主控制台和副控制台同时发出警报信息,提醒操作者主钩摆动幅度过大,需要调整船体、臂架与钢丝绳长度以减小主钩摆动,或者将主钩与吊物下降到较低的位置。
30、本发明产生的有益效果是:本发明实现了对大型起重船上主钩、吊具和吊物进行无人测量,其不仅可以提供施工作业窗口期判断的智能辅助决策,也可以提供施工作业时吊物的状态监测,降低了人工的劳动量并增加的测量的精确度,实现了主钩6自由度的实时运动状态的测量,并生成主钩实时三维模型示意动画,同时可输入吊物与吊具参数,并生成主钩、吊具、吊物实时三维模型示意动画。本发明通过使用高精度激光测距雷达,智能三维信息处理,不仅使测量过程自动化,而且能直观整体看到主钩、吊具和吊物的整体运动状态。
技术特征:
1.一种大型起重船主钩运动测量系统,包括起重船体(1),所述包括起重船体(1)上设置有臂架(2),所述臂架(2)通过吊缆(3)连接有主钩(4),其特征在于,所述臂架(2)包括两个,每个臂架(2)上设置有两个所述主钩(4),四个主钩(4)呈矩形分布,每个臂架(2)的横梁上固接有两台激光测距雷达(9),每个臂架(2)的横梁上的两台激光测距雷达(9)的中心与该臂架(2)的横梁的中心的连线形成的夹角为60°,每个臂架(2)上的两台激光测距雷达(9)两个扇形视场组成了一个蝶形视场,所述蝶形视场的视场范围能够完全覆盖各种工况下所述主钩(4)的运动空间。
2.根据权利要求1所述的大型起重船主钩运动测量系统,其特征在于,每个吊臂距离底座108m的横梁处安装两台激光测距雷达(9)。
3.根据权利要求1所述的大型起重船主钩运动测量系统,其特征在于,每个臂架(2)的横梁上通过安装卡箍连接有承台(10),所述承台(10)上设置有两台激光测距雷达(9)。
4.根据权利要求1所述的大型起重船主钩运动测量系统,其特征在于,所述臂架(2)固定式臂架,所述臂架(2)布置于船艏作业部位。
5.根据权利要求1所述的大型起重船主钩运动测量系统,其特征在于,所述吊缆(3)一端与位于所述起重船体(1)上的吊缆卷扬机连接、另一端与所述主钩(4)连接。
6.一种大型起重船主钩运动测量方法,其特征在于,基于四个所述激光测距雷达(9)获取四个主钩(4)的三维点云;基于三维点云获取四个主钩(4)的点云三维前视图;基于点云三维前视图和目标检测框架fvnet算法获取主钩运动的三维坐标;基于主钩运动的三维坐标进行吊钩运动场的重构与可视化。
7.根据权利要求6所述的大型起重船主钩运动测量方法,其特征在于,具体步骤包括,当四个主钩(4)处于空钩工况时,
8.根据权利要求7所述的大型起重船主钩运动测量方法,其特征在于,智能辅助决策在激光测距雷达监控到空钩摆动与垂直轴夹角超过15°时报警,在主控制台和副控制台同时发出警报信息,提醒操作者主钩摆动幅度过大,需要调整船体、臂架与钢丝绳长度以减小主钩摆动。
9.根据权利要求6所述的大型起重船主钩运动测量方法,其特征在于,具体步骤包括,当四个主钩(4)处于吊物工况时,
10.根据权利要求9所述的大型起重船主钩运动测量方法,其特征在于,智能辅助决策在吊物时:
技术总结
本发明公开了一种大型起重船主钩运动测量系统和方法,其包括起重船体,包括起重船体上设置有臂架,臂架通过吊缆连接有主钩,臂架包括两个,每个臂架上设置有两个主钩,四个主钩呈矩形分布,每个臂架的横梁上固接有两台激光测距雷达,每个臂架的横梁上的两台激光测距雷达的中心与该臂架的横梁的中心的连线形成的夹角为60°,每个臂架上的两台激光测距雷达两个扇形视场组成了一个蝶形视场,蝶形视场的视场范围能够完全覆盖各种工况下主钩的运动空间。本发明使用高精度激光测距雷达,智能三维信息处理,不仅使测量过程自动化,而且能直观整体看到主钩、吊具和吊物的整体运动状态。
技术研发人员:张永涛,田唯,杨秀礼,刘修成,程茂林,李涛,程正祥,吴雪峰,肖浩,周斌,杨佳,金龙,李响,夏昊,张益鹏,黄剑,范晨阳,管政霖,孟奎,文华东
受保护的技术使用者:中交第二航务工程局有限公司
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!