一种自动堆放吸塑盒输送线的制作方法
本发明涉及吸塑盒生产,尤其涉及一种自动堆放吸塑盒输送线。
背景技术:
1、吸塑是一种塑料加工工艺,主要原理是将平展的塑料硬片材加热变软后,采用真空吸附于模具表面,冷却后成型,广泛用于塑料包装、灯饰、广告、装饰等行业。
2、现有的吸塑盒一般很薄,质量很轻,输送过程中,容易产生移位,机械臂抓取需要反复调节,确保抓取到吸塑盒,不便于进行堆放,所以一般采用人工的方式进行捡取堆放,工作内容单一,但劳动强度较大,堆放效率较低,影响生产效率。
技术实现思路
1、本发明的目的是为了解决现有技术中存在的缺点,而提出的一种自动堆放吸塑盒输送线。
2、为了实现上述目的,本发明采用了如下技术方案:
3、一种自动堆放吸塑盒输送线,包括传送装置及抓取组件,所述传送装置用于容纳吸塑盒,并进行输送,所述抓取组件用于夹取吸塑盒,并进行搬运堆放,所述抓取组件包括抓取臂、夹爪装置、升降座及基座,所述基座上设有工业相机;
4、所述传送装置包括传送带,所述传送带上开设有网孔,所述传送带中部设有负压装置,所述传送装置一侧设有连接管,所述连接管与负压装置连通,所述负压装置用于抽取空气,在传送带表面形成吸附气流;
5、所述基座与传送装置相互靠近,所述升降座设置于基座上侧,所述抓取臂与升降座顶部转动连接,所述夹爪装置设置于抓取臂一端;
6、所述抓取臂与升降座之间设有驱动箱,所述驱动箱一侧设有驱动电机,所述抓取臂包括摆臂、控制机组及转动座,所述控制机组用于控制夹爪装置工作,并进行升降和旋转,实现抓取自动化控制;
7、所述夹爪装置包括控制器及夹爪,所述夹爪底部设有吸附气孔,所述夹爪装置一侧设有负压连接管,所述吸附气孔用于配合夹爪装置吸附夹取吸塑盒。
8、优选的,所述传送装置设有两组,且对称设置于抓取组件两侧,所述抓取臂与传送装置对应设置,两组所述传送装置分别用于输送单件吸塑盒及吸塑盒堆叠组。
9、优选的,所述传送装置设有多组,且均匀设置于抓取组件外侧,所述抓取臂呈十字或米字形状,所述工业相机与传送装置对应设置。
10、优选的,所述基座内侧设有工业计算机,所述工业计算机分别与工业相机、驱动电机及控制机组电性连接。
11、优选的,所述负压装置上开设有负压气槽,所述负压装置内侧设有气腔,所述负压气槽侧壁开设有与气腔相通的负压气孔,所述负压装置一侧设有安装管,所述安装管与连接管相通。
12、优选的,所述升降座内侧设有电动液压升降杆,所述驱动箱内侧设有蜗轮及蜗杆,所述驱动电机输出轴与蜗杆连接,所述抓取臂与蜗轮连接。
13、优选的,所述控制机组与转动座之间转动连接,所述控制机组内侧设有升降气缸,所述升降气缸输出轴与夹爪装置连接。
14、优选的,所述负压连接管与吸附气孔相通,所述夹爪材质采用橡胶
15、优选的,所述自动堆放吸塑盒输送线工作步骤包括:
16、步骤1、将传送装置分为两类,一类为上料侧传送装置,用于放置单个的吸塑盒,一类为出料侧传送装置,用于放置堆叠后的吸塑盒组,操作人员控制上料侧传送装置工作,上料单个吸塑盒;
17、步骤2、负压装置抽取空气,传送装置产生吸附气流,确保吸塑盒可以稳定输送,避免产生移位;
18、步骤3、驱动箱控制抓取臂摆动,控制夹爪装置移动至吸塑盒上方,升降座下降,控制夹爪装置夹取吸塑盒,吸附气孔提供吸附压力,确保吸塑盒夹取可靠;
19、步骤4、驱动箱控制抓取臂转动,直至吸塑盒抵达出料侧传送装置,夹爪装置下降,将吸塑盒放置在出料侧传送装置上;
20、步骤5、如此不断重复上述步骤1~4,将吸塑盒堆放在出料侧传送装置上,出料侧传送装置工作,便于进行后续堆放输送。
21、与现有技术相比,本发明的有益效果为:
22、1、本发明采用带有网孔的传送带进行传送吸塑盒,在传送带下侧设置负压装置,用于抽取空气,在传送带表面形成吸附气流,稳定吸塑盒,避免传送过程中,吸塑盒发生移位,提高机械臂抓取搬运可靠性;
23、2、本发明在抓取组件外侧设置传送装置,通过抓取组件抓取吸塑盒进行堆放,避免传送装置频繁启停或前后移动,提高设备工作效率和输送稳定性。
技术特征:
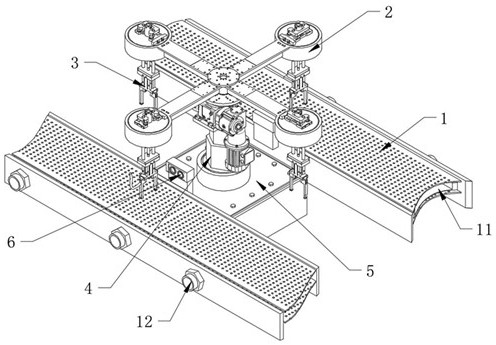
1.一种自动堆放吸塑盒输送线,包括传送装置(1)及抓取组件,其特征在于,所述传送装置(1)用于容纳吸塑盒,并进行输送,所述抓取组件用于夹取吸塑盒,并进行搬运堆放,所述抓取组件包括抓取臂(2)、夹爪装置(3)、升降座(4)及基座(5),所述基座(5)上设有工业相机(6);
2.根据权利要求1所述的一种自动堆放吸塑盒输送线,其特征在于,所述传送装置(1)设有两组,且对称设置于抓取组件两侧,所述抓取臂(2)与传送装置(1)对应设置,两组所述传送装置(1)分别用于输送单件吸塑盒及吸塑盒堆叠组。
3.根据权利要求1所述的一种自动堆放吸塑盒输送线,其特征在于,所述传送装置(1)设有多组,且均匀设置于抓取组件外侧,所述抓取臂(2)呈十字或米字形状,所述工业相机(6)与传送装置(1)对应设置。
4.根据权利要求2或3所述的一种自动堆放吸塑盒输送线,其特征在于,所述基座(5)内侧设有工业计算机,所述工业计算机分别与工业相机(6)、驱动电机(41)及控制机组(21)电性连接。
5.根据权利要求4所述的一种自动堆放吸塑盒输送线,其特征在于,所述负压装置(11)上开设有负压气槽(111),所述负压装置(11)内侧设有气腔(113),所述负压气槽(111)侧壁开设有与气腔(113)相通的负压气孔,所述负压装置(11)一侧设有安装管(112),所述安装管(112)与连接管(12)相通。
6.根据权利要求5所述的一种自动堆放吸塑盒输送线,其特征在于,所述升降座(4)内侧设有电动液压升降杆,所述驱动箱(42)内侧设有蜗轮及蜗杆,所述驱动电机(41)输出轴与蜗杆连接,所述抓取臂(2)与蜗轮连接。
7.根据权利要求6所述的一种自动堆放吸塑盒输送线,其特征在于,所述控制机组(21)与转动座(22)之间转动连接,所述控制机组(21)内侧设有升降气缸,所述升降气缸输出轴与夹爪装置(3)连接。
8.根据权利要求7所述的一种自动堆放吸塑盒输送线,其特征在于,所述负压连接管(32)与吸附气孔(31)相通,所述夹爪材质采用橡胶。
9.根据权利要求1所述的一种自动堆放吸塑盒输送线,其特征在于,所述自动堆放吸塑盒输送线工作步骤包括:
技术总结
本发明涉及吸塑盒生产技术领域,尤其涉及一种自动堆放吸塑盒输送线,包括传送装置及抓取组件,所述传送装置用于容纳吸塑盒,并进行输送,所述抓取组件用于夹取吸塑盒,并进行搬运堆放,所述传送装置包括传送带,所述传送带上开设有网孔,所述传送带中部设有负压装置,所述传送装置一侧设有连接管,所述连接管与负压装置连通,所述负压装置用于抽取空气,在传送带表面形成吸附气流;本发明采用带有网孔的传送带进行传送吸塑盒,在传送带下侧设置负压装置,用于抽取空气,在传送带表面形成吸附气流,稳定吸塑盒,避免传送过程中,吸塑盒发生移位。
技术研发人员:徐千惠,王斌
受保护的技术使用者:常州市方孜袁医用包装有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!