一种无人值守抓斗卸船机的数据处理系统及采集设备的制作方法
本发明涉及抓斗卸船机,具体为一种无人值守抓斗卸船机的数据处理系统及采集设备。
背景技术:
1、抓斗卸船机由于其技术成熟、适应多种煤炭种类及品质的优点,在沿江沿海电厂卸煤码头得到广泛应用。
2、然而,传统的抓斗卸船机存在一些明显的问题:
3、1)人工操作抓斗需要司机具备高超的操作技巧和专注力,操作过程中需要弯腰低头,导致长时间作业的劳动强度极大,容易引发颈椎和腰椎等职业病,对司机的职业健康构成威胁;
4、2)由于抓斗是敞开式的,卸煤过程中产生剧烈扬尘,给环境带来污染;操作不熟练的司机常将煤撒在水域,造成燃料损失,为了提高卸煤速度,司机常采取甩斗等操作,导致粉尘飞扬,环境问题突出。
5、3)此外,不熟练的司机操作还存在抓斗与船舱、煤斗之间碰撞的安全隐患。
6、针对上述问题,智能化无人驾驶技术在抓斗卸船机领域的研究应运而生。该技术的应用可以显著减轻司机的劳动强度,降低职业健康风险,并有效减少污染,提高卸船过程的安全性和环保性。
7、基于此,本发明设计了一种无人值守抓斗卸船机的数据处理系统及采集设备,以解决上述提到的问题。
技术实现思路
1、本发明的目的在于提供一种无人值守抓斗卸船机的数据处理系统及采集设备,以解决上述提到的问题。
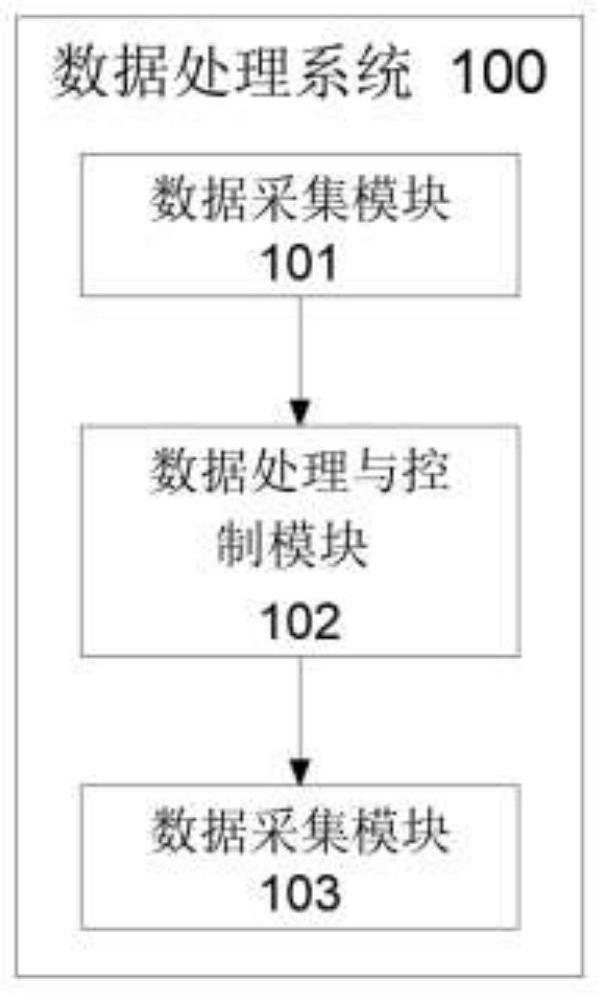
2、为实现上述目的,本发明提供如下技术方案:一种无人值守抓斗卸船机的数据处理系统,包括数据处理系统,所述数据处理系统包括数据采集模块、数据处理与控制模块和系统优化模块;
3、所述数据采集模块包括多组传感装置,用于对抓斗状态、船舶状态、煤堆状况等数据的采集,所述传感装置包括但不限于视觉摄像头、惯性导航系统、超声波雷达和物联网传感节点等;
4、所述数据处理与控制模块包括数据分析单元和抓斗控制单元,所述数据分析单元基于多源异构数据,实现对抓斗的工作状态监测、故障预测、效率评估等,所述抓斗控制单元根据分析结果制定精确的抓取策略和控制指令;
5、所述系统优化模块采用模型预测方法,该模型预测方法基于数据处理与控制模块的输出,实时优化和调节数据处理系统的工作流程,可以提高数据处理系统效率和安全性。
6、优选的,上述一种无人值守抓斗卸船机的数据处理系统中,所述视觉摄像头采用全景球形超广角或者鱼眼超广角等镜头,使得数据处理系统可以保证对抓斗整个周边环境和视场范围的拍摄和采集。
7、优选的,上述一种无人值守抓斗卸船机的数据处理系统中,所述惯性导航系统包括采用挠性安装的三维陀螺仪和加速度计,使得数据处理系统能够高精度测量并输出抓斗的位移、运动轨迹和姿态角信息。
8、优选的,上述一种无人值守抓斗卸船机的数据处理系统中,所述数据处理与控制模块采用基于深度学习的方法,该方法训练抓斗状态监测及控制模型,并利用迁移学习技术进行模型优化,实现数据处理系统的持续升级。
9、优选的,上述一种无人值守抓斗卸船机的数据处理系统中,所述系统优化模块可以将新的数据集作为增量样本继续训练深度网络,可以使得数据处理系统的性能指标不断提升,以适应环境的变化。
10、优选的,上述一种无人值守抓斗卸船机的数据处理系统中,所述数据处理系统基于5g通信技术搭建信息传输框架,可以确保据处理系统稳定可靠的无线通信增强连接。
11、一种用于无人值守抓斗卸船机的数据采集设备,包括数据采集设备,所述数据采集设备包括惯性测量单元、三维激光雷达系统和视频摄像头;
12、所述惯性测量单元用于采集抓斗的位移、速度、加速度等运动学信息;
13、所述三维激光雷达系统用于对抓斗周围环境进行三维扫描并实时采集距离数据。
14、优选的,上述一种无人值守抓斗卸船机的数据采集设备中,所述数据采集设备还包括设置于煤堆及船舱壁面的毫米波雷达,所述毫米波雷达用于扫描采集堆面、壁面形状数据。
15、与现有技术相比,本发明的有益效果是:
16、1、本发明中数据处理系统的智能化方案在无人值守抓斗卸船机领域展现了卓越的成果,通过全面而准确的数据采集,系统实现了对抓斗和周围环境的实时感知,使得抓斗在各种工作场景下都能做出迅速而精准的反应,这种无人值守操作的优越性体现在多个方面:
17、2、首先,通过智能数据处理和控制模块,系统成功实现了对抓斗工作状态的监测、故障的预测以及效率的评估,这不仅提高了工作效率,还降低了运营成本,因为无需额外的人工干预,该数据处理系统能够在小时不间断运行,大大提高了生产效益;
18、3、其次,该数据处理系统在实现全自动模式下抓斗的同时,还强调了对设备安全的高度防护,通过应用最新的三维激光、雷达精准测控等技术手段,系统可实现设备多角度、全方位的安全防护,这不仅保障了设备的安全性,减少了潜在的事故风险,还提高了工作环境的安全水平;
19、4、再者,通过实时可视化测控技术,系统实现了对船舱煤垛位的实时监测,这不仅使操作更加直观,还有助于优化抓煤策略,提高抓煤的准确性和效率;
20、5、最后,该数据处理系统的设备故障预警和运行优化系统构建,为整个系统提供了更高层次的智能化管理,通过保存运行数据、重新训练和优化深度学习模型,该数据处理系统能够不断提升自身的适应性和性能,确保在不同环境和工作条件下都能够保持高水平的操作表现,最终实现了达到业界标准水平的目标。
21、6、总的来说,该数据处理系统的智能化设计不仅推动了无人值守抓斗卸船机技术的发展,也为相关行业的自动化和智能化应用树立了标杆,其多重有益效果不仅提升了工作效率和安全性,也为企业带来了显著的经济效益,为未来智能化物流领域的发展奠定了坚实的基础。
技术特征:
1.一种无人值守抓斗卸船机的数据处理系统,包括数据处理系统(100),其特征在于,所述数据处理系统(100)包括数据采集模块(101)、数据处理与控制模块(102)和系统优化模块(103);
2.根据权利要求1所述的一种无人值守抓斗卸船机的数据处理系统,其特征在于:所述视觉摄像头(101a-1)采用全景球形(101a-1a)超广角或者鱼眼(101a-1b)超广角等镜头,使得数据处理系统(100)可以保证对抓斗整个周边环境和视场范围的拍摄和采集。
3.根据权利要求2所述的一种无人值守抓斗卸船机的数据处理系统,其特征在于:所述惯性导航系统(101a-2)包括采用挠性安装的三维陀螺仪(101a-2a)和加速度计(101a-2b),使得数据处理系统(100)能够高精度测量并输出抓斗的位移、运动轨迹和姿态角信息。
4.根据权利要求3所述的一种无人值守抓斗卸船机的数据处理系统,其特征在于:所述数据处理与控制模块(200)采用基于深度学习的方法,该方法训练抓斗状态监测及控制模型,并利用迁移学习技术进行模型优化,实现数据处理系统(100)的持续升级。
5.根据权利要求4所述的一种无人值守抓斗卸船机的数据处理系统,其特征在于:所述系统优化模块(300)可以将新的数据集作为增量样本继续训练深度网络,可以使得数据处理系统(100)的性能指标不断提升,以适应环境的变化。
6.根据权利要求5所述的一种无人值守抓斗卸船机的数据处理系统,其特征在于:所述数据处理系统(100)基于5g通信技术搭建信息传输框架,可以确保据处理系统(100)稳定可靠的无线通信增强连接。
7.一种用于无人值守抓斗卸船机的数据采集设备,包括数据采集设备(200),其特征在于:所述数据采集设备(200)包括惯性测量单元(201)、三维激光雷达系统(202)和视频摄像头(203);
8.根据权利要求7所述的一种无人值守抓斗卸船机的数据采集设备,其特征在于:所述数据采集设备(200)还包括设置于煤堆及船舱壁面的毫米波雷达(204),所述毫米波雷达(204)用于扫描采集堆面、壁面形状数据。
技术总结
本发明公开了一种无人值守抓斗卸船机的数据处理系统及采集设备,涉及抓斗卸船机技术领域,包括数据处理系统,数据处理系统包括数据采集模块、数据处理与控制模块和系统优化模块,数据采集模块包括多组传感装置,用于对抓斗状态、船舶状态、煤堆状况等数据的采集,传感装置包括但不限于视觉摄像头、惯性导航系统、超声波雷达和物联网传感节点等,数据处理与控制模块包括数据分析单元和抓斗控制单元,该数据处理系统的智能化设计不仅推动了无人值守抓斗卸船机技术的发展,也为相关行业的自动化和智能化应用树立了标杆,其多重有益效果不仅提升了工作效率和安全性,也为企业带来了显著的经济效益,为未来智能化物流领域的发展奠定了坚实的基础。
技术研发人员:王振,沈霞,陈祥,高小普,何世荣
受保护的技术使用者:南京国电环保科技有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!