一种袋装物料搬运机械手
本申请涉及物流搬运机械的,尤其涉及一种袋装物料搬运机械手。
背景技术:
1、目前在出厂装车搬运袋装水泥、袋装面粉、袋装大米等袋装物料时,绝大多数厂家采用的是半自动化装车机,由输送带将袋装物料输送到货车车厢上方,直接落到货车车厢内,再由人工将袋装物料码放到车厢内。这种装车方式不仅装车效率低、劳动强度大,而且往往伴随粉尘问题,严重影响工人健康。
2、在物料搬运系统中,运用自动化机械手取替人工完成重复、单一、简单的搬运动作是一种势在必行的趋势。现有的机械手大多数为气动爪,即采用单个气缸直接驱动一对机械手的基本结构,机械手与气缸多数呈直线布置,安装在尾部的气缸推动传动机构(通常为杠杆、齿轮齿条结构),驱动前端的机械手闭合或打开,由此实现物料的抓取或摆放。
3、这种直线式的机构布置会导致机械手在高度方向尺寸较大。因此,在承载机构尺寸不变的情况下,若搬运更重的物体则需采用更大的气缸,这将导致整个机械手在高度方向的尺寸大幅度增加,不适合安装在大型袋装物料码垛机器上。
技术实现思路
1、本发明的目的是提供一种高效、工作可靠稳定的袋装物料自动抓取与摆放装置,并且本发明高度方向尺寸小,适合安装在大型袋装物料码垛机器上。
2、本申请解决上述技术问题的技术方案如下:
3、一种袋装物料搬运机械手,包括爪头机构和旋转驱动机构,所述的爪头机构设在旋转驱动机构底部,旋转驱动机构用于带动爪头机构整体旋转;
4、所述的爪头机构包括爪头安装板、夹料气缸、推杆连接杆、爪头推轴、爪头转轴推杆、爪头转轴ⅰ、爪头转轴ⅱ、物料搬运气爪ⅰ以及物料搬运气爪ⅱ;
5、所述夹料气缸的一端铰接于爪头安装板上,所述夹料气缸的活塞杆通过推杆连接杆与爪头推轴连接,爪头推轴通过铰链与推杆连接杆连接,爪头转轴推杆的上端通过铰链与爪头推轴连接;
6、所述爪头转轴ⅰ与爪头转轴ⅱ均设置有两个,两个爪头转轴ⅰ分别位于爪头安装板下方的两端,爪头转轴ⅱ位于爪头转轴ⅰ的下方,一个爪头转轴ⅰ与一个爪头转轴ⅱ为一组,爪头转轴推杆的下端与同一组爪头转轴i和爪头转轴ⅱ连接,物料搬运气爪ⅰ安装在一组爪头转轴ⅰ和爪头转轴ⅱ的两端,物料搬运气爪ⅱ安装在另一组爪头转轴ⅰ和爪头转轴ⅱ的两端。
7、进一步的,所述爪头机构还包括爪头连接杆ⅰ、爪头过渡连杆ⅰ、爪头摇杆、爪头过渡连杆ⅱ以及爪头连接杆ⅱ,物料搬运气爪ⅰ的外侧与爪头连接杆ⅰ相连,爪头连接杆ⅰ的上端与爪头过渡连杆ⅰ的一端通过铰链连接,爪头过渡连杆ⅰ的另一端与爪头摇杆的一端相连接,爪头摇杆的中部以铰链形式安装在爪头安装板上,爪头摇杆的另一端与爪头过渡连杆ⅱ的一端相连接,爪头过渡连杆ⅱ的另一端通过爪头连接杆ⅱ与物料搬运气爪ⅱ相连接。
8、进一步的,所述爪头推轴与多个夹料气缸连接,多个夹料气缸以爪头转轴推杆为轴线对称布置。
9、进一步的,所述旋转驱动机构包括爪头支柱、夹头上支撑板、旋转电机安装板、旋转电机支座、爪头旋转电机、爪头支撑滚动轴承、爪头推力轴承、爪头旋转调整轴套和爪头旋转轴;
10、所述爪头支柱通过螺栓连接爪头安装板和夹头上支撑板,旋转电机支座通过螺栓固定在旋转电机安装板上,爪头旋转电机固定在旋转电机安装板上,旋转电机安装板固定在机架上,爪头旋转轴一端通过键和外螺母与爪头旋转电机的输出轴相连接,爪头旋转轴的另一端通过螺母固定在夹头上支撑板上;
11、爪头支撑滚动轴承的内圈与爪头旋转轴相连接,爪头支撑滚动轴承的外圈与爪头旋转调整轴套采用过盈配合,爪头旋转调整轴套通过螺栓固定在旋转电机安装板上,爪头推力轴承安装在爪头旋转调整轴套的内台与爪头支撑滚动轴承之间,用于承受爪头机构的轴向载荷。
12、进一步的,所述物料搬运气爪ⅰ和物料搬运气爪ⅱ的气爪数量与实际包装袋的大小相对应,物料搬运气爪ⅰ和物料搬运气爪ⅱ的气爪均为等间隔分布。
13、综上所述,与现有技术相比,上述技术方案的有益效果是:
14、本申请所述的一种袋装物料搬运机械手,采用空间布置的双气缸传动机构驱动物料搬运气爪运动,采用直接旋转驱动机构带动爪头机构整体旋转,可实现物料搬运气爪ⅰ和物料搬运气爪ⅱ同步张开与闭合以及包装袋的任意角度摆放。而且本发明可大幅度降低了机械手高度方向上的长度,减小整个机械手的占用空间。
技术特征:
1.一种袋装物料搬运机械手,包括:爪头机构和旋转驱动机构,其特征在于:所述的爪头机构设在旋转驱动机构底部,旋转驱动机构用于带动爪头机构整体旋转;
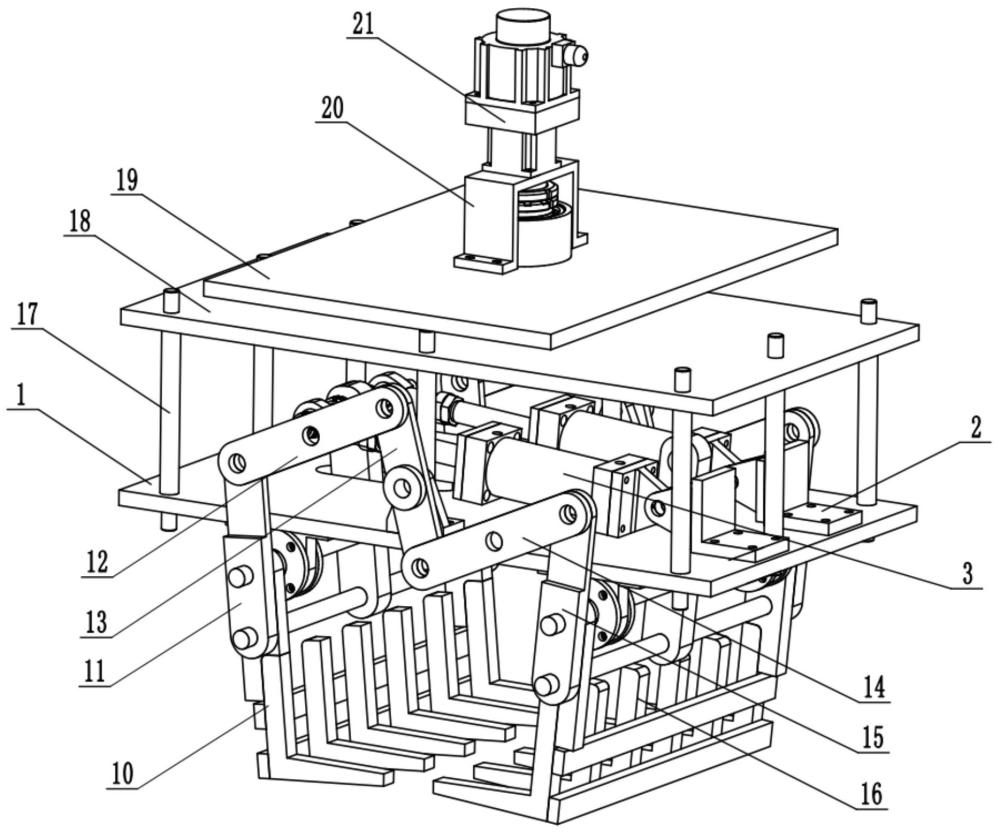
2.根据权利要求1所述的一种袋装物料搬运机械手,其特征在于:所述爪头机构还包括爪头连接杆ⅰ(11)、爪头过渡连杆ⅰ(12)、爪头摇杆(13)、爪头过渡连杆ⅱ(14)以及爪头连接杆ⅱ(15),物料搬运气爪ⅰ(10)的外侧与爪头连接杆ⅰ(11)相连,爪头连接杆ⅰ(11)的上端与爪头过渡连杆ⅰ(12)的一端通过铰链连接,爪头过渡连杆ⅰ(12)的另一端与爪头摇杆(13)的一端相连接,爪头摇杆(13)的中部以铰链形式安装在爪头安装板(1)上,爪头摇杆(13)的另一端与爪头过渡连杆ⅱ(14)的一端相连接,爪头过渡连杆ⅱ(14)的另一端通过爪头连接杆ⅱ(15)与物料搬运气爪ⅱ(16)相连接。
3.根据权利要求2所述的一种袋装物料搬运机械手,其特征在于:所述爪头推轴(5)与多个夹料气缸(3)连接,多个夹料气缸(3)以爪头转轴推杆(6)为轴线对称布置。
4.根据权利要求1所述的一种袋装物料搬运机械手,其特征在于:所述旋转驱动机构包括爪头支柱(17)、夹头上支撑板(18)、旋转电机安装板(19)、旋转电机支座(20)、爪头旋转电机(21)、爪头支撑滚动轴承(22)、爪头推力轴承(23)、爪头旋转调整轴套(24)和爪头旋转轴(25);
5.根据权利要求1所述的一种袋装物料搬运机械手,其特征在于:所述物料搬运气爪ⅰ(10)和物料搬运气爪ⅱ(16)的气爪数量与实际包装袋的大小相对应,物料搬运气爪ⅰ(10)和物料搬运气爪ⅱ(16)的气爪均为等间隔分布。
技术总结
本申请公开了一种袋装物料搬运机械手,属于物流搬运机械的技术领域,包括爪头安装板、夹料气缸、推杆连接杆、爪头推轴、爪头转轴推杆、爪头转轴Ⅰ、爪头转轴Ⅱ、物料搬运气爪Ⅰ以及物料搬运气爪Ⅱ;所述夹料气缸的一端铰接于爪头安装板上,所述夹料气缸的活塞杆通过推杆连接杆与爪头推轴连接,爪头推轴通过铰链与推杆连接杆连接,爪头转轴推杆的上端通过铰链与爪头推轴连接;一个爪头转轴Ⅰ与一个爪头转轴Ⅱ为一组,爪头转轴推杆的下端与同一组爪头转轴I和爪头转轴Ⅱ连接,物料搬运气爪Ⅰ安装在一组爪头转轴Ⅰ和爪头转轴Ⅱ的两端,物料搬运气爪Ⅱ安装在另一组爪头转轴Ⅰ和爪头转轴Ⅱ的两端。本申请具有减小整个机械手占用空间的效果。
技术研发人员:于涛,张永腾,苗壮,徐孝国,张旭,芦帅,朱淑亮,李振
受保护的技术使用者:烟台大学
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!