汽车起重机独立变转速泵控液压系统
本发明涉及工程机械,特别是涉及一种汽车起重机独立变转速泵控液压系统。
背景技术:
1、随着社会的不断发展,汽车起重机由于具有起重范围大、适用范围广、承载能力强等特点,在基础设施及大型民生项目建设中起到非常重要的作用。随着汽车起重机的发展,负载敏感技术也得到了充分发展。汽车起重机最主要的作用是对重物进行举升或下降,伸缩机构的作用是对主臂进行伸缩,变幅机构的作用是对主臂进行举升和下放。汽车起重机负载敏感系统主要由负载敏感泵、压力补偿器、液控比例主阀及伸缩变幅缸组成,该系统能够将负载敏感泵输入到系统中的压力流量和负载运行所需要的负载压力进行匹配,从而降低系统的溢流损失、减小能耗,提高系统效率,因此被广泛应用到汽车起重机等工程机械领域。
2、但是在现有的汽车起重机的负载敏感系统中,通常采用比例多路阀作为主阀,结合压力补偿器、平衡阀以及溢流阀等,在伸缩、变幅机构运行过程中,由于负载敏感泵存在一定的压力裕度,这部分压力均通过压力补偿器和主阀节流损耗掉,使得系统的能量利用效率有待进一步提高。同时,起重机在小负载时希望速度较快,在复合动作时希望动作协调,而变幅系统和伸缩系统共用定量泵的系统在复合动作时流量不足,会出现负载端动作缓慢甚至停止的情况,系统复合动作操控性差。
技术实现思路
1、本发明的目的在于提供一种汽车起重机独立变转速泵控液压系统,能够实现在变幅伸缩机构单独和复合动作时降低系统中的节流损耗,提高了系统的能源利用率。
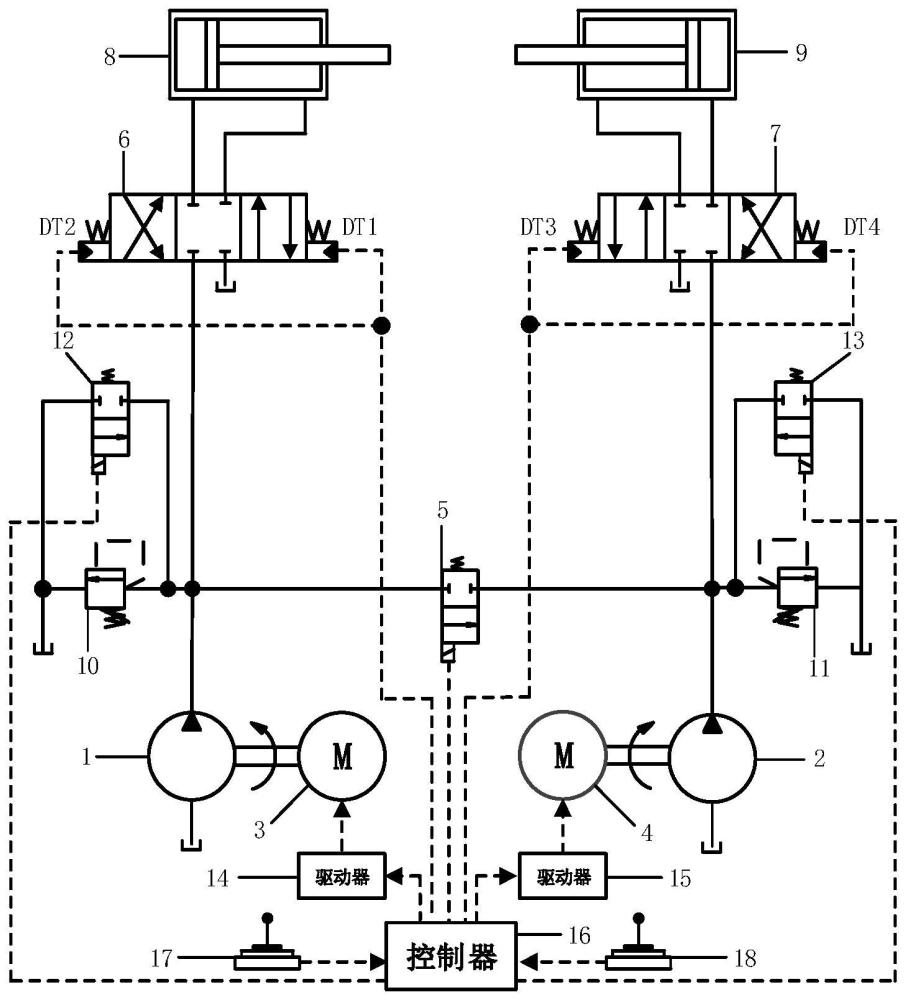
2、一种汽车起重机独立变转速泵控液压系统,其包括:变幅手柄、伸缩手柄、控制器、第一定量泵、第二定量泵、二位二通电磁换向阀、第一三位四通电磁换向阀、第二三位四通电磁换向阀、变幅液压缸、伸缩液压缸、第一溢流阀、第二溢流阀、第一电磁卸荷阀和第二电磁卸荷阀;
3、所述变幅手柄、所述伸缩手柄、所述第一定量泵、所述第二定量泵、所述第一电磁卸荷阀的接线端、所述第二电磁卸荷阀的接线端、所述第一三位四通电磁换向阀的右位接线端、所述第一三位四通电磁换向阀的左位接线端、所述第二三位四通电磁换向阀的左位接线端、所述第二三位四通电磁换向阀的右位接线端和所述二位二通电磁换向阀的接线端均与所述控制器连接;
4、所述第一定量泵的进油口与油箱连通,所述第二定量泵的进油口与油箱连通;
5、所述第一定量泵的出油口、所述第一电磁卸荷阀的进油口、所述第一溢流阀的进油口、所述二位二通电磁换向阀的第一进出口和所述第一三位四通电磁换向阀的p口相互连通;
6、所述第二定量泵的出油口、所述第二电磁卸荷阀的进油口、所述第二溢流阀的进油口、所述二位二通电磁换向阀的第二进出口和所述第二三位四通电磁换向阀的p口相互连通;
7、所述第一电磁卸荷阀的出油口、所述第一溢流阀的出油口、所述第二电磁卸荷阀的出油口、所述第二溢流阀的出油口、所述第一三位四通电磁换向阀的t口和所述第二三位四通电磁换向阀的t口均与油箱连通;
8、所述变幅液压缸的有杆腔与所述第一三位四通电磁换向阀的a口连通,所述变幅液压缸的无杆腔与所述第一三位四通电磁换向阀的b口连通;
9、所述伸缩液压缸的有杆腔与所述第二三位四通电磁换向阀的a口连通,所述伸缩液压缸的无杆腔与所述第二三位四通电磁换向阀的b口连通。
10、可选地,所述系统还包括第一驱动器、第二驱动器、第一永磁同步电机和第二永磁同步电机;
11、所述控制器通过所述第一驱动器与第一永磁同步电机相连,对所述第一永磁同步电机进行转速控制,所述第一永磁同步电机与所述第一定量泵相连;
12、所述控制器通过所述第二驱动器与第二永磁同步电机相连,对所述第二永磁同步电机进行转速控制,所述第二永磁同步电机与所述第二定量泵相连。
13、可选地,所述系统的运行工况包括待机工况、复合动作工况和单独动作工况;单独动作工况包括变幅动作工况和伸缩动作工况;
14、所述待机工况为所述控制器未收到所述变幅手柄发送的变幅信号和所述伸缩手柄发送的伸缩信号;
15、所述复合动作工况为所述控制器同时收到所述变幅手柄发送的变幅信号和所述伸缩手柄发送的伸缩信号;
16、所述变幅动作工况为所述控制器进收到所述变幅手柄发送的所述变幅信号;所述伸缩动作工况为所述控制器今收到所述伸缩手柄发送的所述伸缩信号。
17、可选地,当所述运行工况为所述复合动作工况时,所述二位二通电磁换向阀失电断开,所述第一定量泵输出的油液传输至所述变幅液压缸,所述第二定量泵输出的油液传输至所述伸缩液压缸;
18、若所述变幅信号为起幅信号且所述伸缩信号为伸出信号,所述第一三位四通电磁换向阀的右位接线端和所述第二三位四通电磁换向阀的左位接线端得电连通,所述第一三位四通电磁换向阀的左位接线端和所述第二三位四通电磁换向阀的右位接线端失电断开;
19、若所述变幅信号为起幅信号且所述伸缩信号为缩回信号,所述第一三位四通电磁换向阀的右位接线端和所述第二三位四通电磁换向阀的右位接线端得电连通,所述第一三位四通电磁换向阀的左位接线端和所述第二三位四通电磁换向阀的左位接线端失电断开;
20、若所述变幅信号为落幅信号且所述伸缩信号为伸出信号,所述第一三位四通电磁换向阀的右位接线端和所述第二三位四通电磁换向阀的右位接线端失电断开,所述第一三位四通电磁换向阀的左位接线端和所述第二三位四通电磁换向阀的左位接线端得电连通;
21、若所述变幅信号为落幅信号且所述伸缩信号为缩回信号,所述第一三位四通电磁换向阀的左位接线端和所述第二三位四通电磁换向阀的右位接线端得电连通,所述第一三位四通电磁换向阀的右位接线端和所述第二三位四通电磁换向阀的左位接线端失电断开。
22、可选地,当所述运行工况为所述变幅动作工况时,所述二位二通电磁换向阀得电连通,所述第二三位四通电磁换向阀的左位接线端和所述第二三位四通电磁换向阀的右位接线端失电断开;所述第一定量泵和所述第二定量泵连通,所述第一定量泵输出的油液和所述第二定量泵输出的油液传输至所述变幅液压缸;
23、若所述变幅信号为起幅信号,所述第一三位四通电磁换向阀的右位接线端得电连通,所述第一三位四通电磁换向阀的左位接线端失电断开;
24、若所述变幅信号为落幅信号,所述第一三位四通电磁换向阀的左位接线端得电连通,所述第一三位四通电磁换向阀的右位接线端失电断开。
25、可选地,当所述运行工况为所述伸缩动作工况时,所述二位二通电磁换向阀得电连通,所述第一三位四通电磁换向阀的左位接线端和所述第一三位四通电磁换向阀的右位接线端失电断开;所述第一定量泵和所述第二定量泵连通,所述第一定量泵输出的油液和所述第二定量泵输出的油液传输至所述伸缩液压缸;
26、若所述伸缩信号为伸出信号,所述第二三位四通电磁换向阀的右位接线端失电断开,所述第二三位四通电磁换向阀的左位接线端得电连通;
27、若所述伸缩信号为缩回信号,所述第二三位四通电磁换向阀的左位接线端失电断开,所述第二三位四通电磁换向阀的右位接线端得电连通。
28、可选地,当所述运行工况为所述待机工况时,所述第一三位四通电磁换向阀的右位接线端、所述第一三位四通电磁换向阀的左位接线端、所述第二三位四通电磁换向阀的左位接线端、所述第二三位四通电磁换向阀的右位接线端和所述二位二通电磁换向阀的接线端失电断开。
29、可选地,当所述运行工况为所述复合动作工况时,所述变幅手柄的开度α1为0<α1≤α1max;所述伸缩手柄的开度α2为0<α2≤α2max;
30、所述第一定量泵的输出流量q1为q1=k1α1dp1,所述第二定量泵的输出流量q2为q2=k2α2dp2;其中,α1max为变幅手柄的最大开度,α2max为伸缩手柄的最大开度,dp1为第一定量泵的排量,dp2为第二定量泵的排量,k1和k2为比例系数;
31、当所述运行工况为所述单独动作工况时,所述变幅手柄的开度α1为0<α1≤α1max;所述伸缩手柄的开度α2为0<α2≤α2max;
32、所述第一定量泵的输出流量q1为q1=k1α1dp1,所述第二定量泵的输出流量q2为q2=k2α2dp2;
33、所述第一定量泵与所述第二定量泵合流后流量q为q=k1α1dp1+k2α2dp2;
34、当所述运行工况为所述待机工况时,所述变幅手柄的开度α1=0,所述伸缩手柄的开度α2=0;所述第一定量泵的输出流量q1=0,所述第二定量泵的输出流量q2=0。
35、本发明的效果如下:
36、本发明汽车起重机独立变转速泵控液压系统,采用两个功率较小的泵替代原系统功率较大的负载敏感泵,既能在单独动作时满足大流量需求以及微动特性,也能在复合动作时对变幅伸缩机构进行单独控制,进一步提高了起重机的能源利用率。
37、本发明汽车起重机独立变转速泵控液压系统,由于取消了泵口压力裕度,减少了阀口节流损失,从而降低了系统的能量损耗。相比负载敏感系统,能够在变幅伸缩机构单独和复合动作时降低系统中的节流损耗,提高了系统的能源利用率。
38、本发明汽车起重机独立变转速泵控液压系统,不仅减小了能量损耗,而且降低了因功率损失产生的热量,减小了系统发热,提高了液压元件的使用寿命,降低了冷却系统的装机成本。
- 还没有人留言评论。精彩留言会获得点赞!