剪叉式高空作业平台的制作方法
本申请属于升降机械设备,具体地,涉及一种剪叉式高空作业平台。
背景技术:
1、剪叉式高空作业平台是一种被广泛应用于各行业的高空作业、设备安检维修等可移动的重要高空作业设备。目前,一般通过安装于剪叉式高空作业平台最底部的剪叉臂上的角度传感器进行角度检测,或者通过判断剪叉式高空作业平台的最底部的剪叉臂是否与限位开关接触,从而实现叉架单元是否处于完全收缩折叠状态的检测。然而因剪叉臂具有一定挠性,在举升油缸作用下,剪叉臂自身会产生一定形变,使得被动运动的剪叉臂的动作相对于主动运动的剪叉臂存在一定滞后性。
技术实现思路
1、本申请的目的是提供一种剪叉式高空作业平台,提升对叉架单元的状态检测的灵敏性。
2、本申请提供一种剪叉式高空作业平台,剪叉式高空作业平台包括:
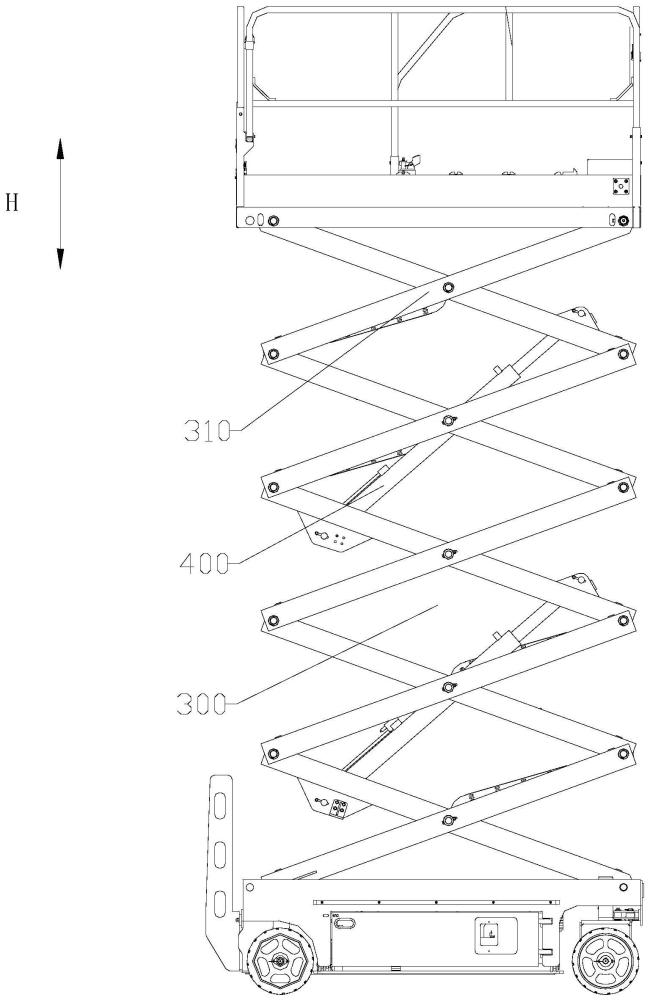
3、剪叉举升装置,包括沿竖直方向叠置的多个叉架单元;
4、举升油缸,用于驱动剪叉举升装置沿竖直方向升高展开或收缩折叠;
5、限位开关,靠近举升油缸设置并用于检测与举升油缸毗邻的叉架单元的伸缩状态;以及
6、油缸检测元件,用于获取举升油缸的工况状态。
7、在一些实施方式中,举升油缸包括设置在无杆腔工作油路上的下降阀,油缸检测元件设置在下降阀上并用于检测油缸工作油压。
8、在一些实施方式中,油缸检测元件为压力传感器或压力开关。
9、在一些实施方式中,限位开关设置在与举升油缸毗邻的叉架单元上,剪叉举升装置包括收藏状态和举升状态,在收藏状态下,限位开关处于限位压缩状态,在举升状态下,限位开关处于限位弹开状态。
10、在一些实施方式中,剪叉式高空作业平台还包括:
11、控制器,用于根据油缸检测元件的油缸工况和限位开关的开关状态,判断剪叉举升装置的当前状态。
12、在一些实施方式中,控制器被配置为:
13、确定油缸工况为油缸卸压工况,且确定限位开关处于限位压缩状态;
14、判断剪叉举升装置处于收藏状态;
15、设定剪叉式高空作业平台的行走车体为不限速模式。
16、在一些实施方式中,控制器被配置为:
17、确定油缸工况为油缸工作工况,且确定限位开关处于限位弹开状态;
18、判断剪叉举升装置处于举升状态;
19、设定剪叉式高空作业平台的行走车体为限制移动模式或低速模式。
20、在一些实施方式中,油缸检测元件用于检测举升油缸的油缸工作油压,控制器进一步被配置为:
21、确定油缸工作油压大于预设油压值;
22、判断油缸工况为油缸工作工况;
23、确定油缸工作油压不大于预设油压值;
24、判断油缸工况为油缸卸压工况。
25、在一些实施方式中,剪叉式高空作业平台还包括手柄操作机构,控制器还被配置为:
26、确定手柄操作机构执行平台下降指令;
27、确定限位开关处于限位压缩状态,且确定油缸工作油压大于预设油压值;
28、在预定延长时间后控制关闭下降阀。
29、在一些实施方式中,预定延长时间不小于1.5秒,预设油压值不大于4mpa。
30、在一些实施方式中,剪叉举升装置包括左右对称设置的第一举升装置和第二举升装置,第一举升装置与第二举升装置之间通过中间连接杆连接。
31、在本申请中,限位开关靠近举升油缸设置,能够及时检测到与举升油缸毗邻的叉架单元的实时伸缩状态;相较于原有的设于剪叉底部的限位开关,靠近油缸设置的限位开关可减少剪叉臂自身形变对检测结果的滞后性影响,从而提升检测的灵敏性。本申请还可通过增设的油缸检测元件,实时获取举升油缸的工况状态,从而对叉架单元的收缩折叠状态进行更准确判断。
32、本申请实施方式的其它特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:
1.一种剪叉式高空作业平台,其特征在于,所述剪叉式高空作业平台包括:
2.根据权利要求1所述的剪叉式高空作业平台,其特征在于,所述举升油缸(400)包括设置在无杆腔工作油路上的下降阀,所述油缸检测元件设置在所述下降阀上并用于检测油缸工作油压。
3.根据权利要求2所述的剪叉式高空作业平台,其特征在于,所述油缸检测元件为压力传感器或压力开关。
4.根据权利要求1~3中任意一项所述的剪叉式高空作业平台,其特征在于,所述限位开关(500)设置在与所述举升油缸(400)毗邻的所述叉架单元(310)上,所述剪叉举升装置(300)包括收藏状态和举升状态,在所述收藏状态下,所述限位开关(500)处于限位压缩状态,在所述举升状态下,所述限位开关(500)处于限位弹开状态。
5.根据权利要求4所述的剪叉式高空作业平台,其特征在于,所述剪叉式高空作业平台还包括:
6.根据权利要求5所述的剪叉式高空作业平台,其特征在于,所述控制器被配置为:
7.根据权利要求5所述的剪叉式高空作业平台,其特征在于,所述控制器被配置为:
8.根据权利要求5所述的剪叉式高空作业平台,其特征在于,所述油缸检测元件用于检测所述举升油缸(400)的油缸工作油压,所述控制器进一步被配置为:
9.根据权利要求8所述的剪叉式高空作业平台,其特征在于,所述剪叉式高空作业平台还包括手柄操作机构,所述控制器还被配置为:
10.根据权利要求9所述的剪叉式高空作业平台,其特征在于,所述预定延长时间不小于1.5秒,所述预设油压值不大于4mpa。
11.根据权利要求1所述的剪叉式高空作业平台,其特征在于,所述剪叉举升装置(300)包括左右对称设置的第一举升装置(300a)和第二举升装置(300b),所述第一举升装置(300a)与所述第二举升装置(300b)之间通过中间连接杆(600)连接。
技术总结
本申请涉及升降机械设备技术领域,公开了一种剪叉式高空作业平台。剪叉式高空作业平台包括:剪叉举升装置,包括沿竖直方向叠置的多个叉架单元;举升油缸,用于驱动所述剪叉举升装置沿所述竖直方向升高展开或收缩折叠;限位开关,靠近所述举升油缸设置并用于检测与所述举升油缸毗邻的所述叉架单元的伸缩状态;以及油缸检测元件,用于获取所述举升油缸的工况状态。本申请的剪叉式高空作业平台可以提升叉架单元的状态检测的灵敏性。
技术研发人员:孙卫平,柳权,刘明,吴斌
受保护的技术使用者:湖南中联重科智能高空作业机械有限公司
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!