一种基于塔吊平衡臂配重运动的平衡控制方法与流程
本发明涉及塔吊控制,特别是一种基于塔吊平衡臂配重运动的平衡控制方法。
背景技术:
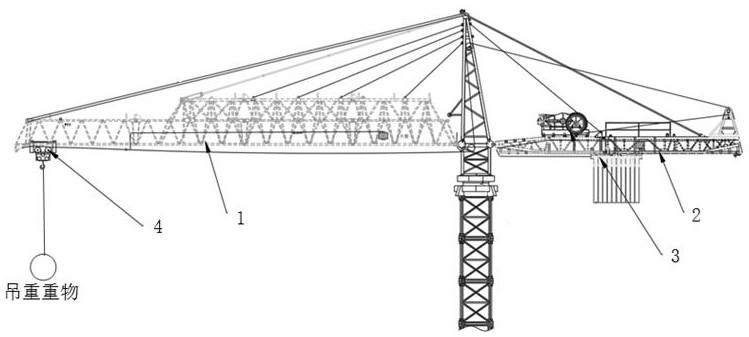
1、塔吊起重臂和平衡臂是塔吊的两个重要组成部分,它们承担着支撑和平衡塔吊主体以及进行货物起升的任务。平衡臂的配重小车是一种用于调节平衡臂重量的设备,通过将配重小车移动到不同的位置,以改变平衡臂的重心位置,从而实现平衡调节。
2、现有的塔吊自平衡控制方法主要是利用倾角传感器监测塔吊平衡臂的倾斜程度和方向,根据倾斜的程度和方向来判断哪一侧需要进行平衡调节,通过重量传感器监测塔吊平衡臂和配重的重量状态,以及平衡臂和配重之间的重心位置,根据重心位置来调整配重的位置;通过位置传感器监测配重小车的位置和运动状态,以确定配重小车当前的位置和移动距离,从而控制配重小车的运动;然后通过控制器读取传感器数据和执行相应的算法来调节配重小车的位移,以实现塔吊平衡臂的自动调节。然而这种方式传感器数据较多,传感器的数据采集和处理需要一定的时间,响应时间延迟:而且配重小车的位移无法进行精细调节,从而降低平衡臂的稳定性和安全性。
技术实现思路
1、本发明的目的是克服现有技术的上述不足而提供一种精准性、安全性和可靠性高的基于塔吊平衡臂配重运动的平衡控制方法。
2、本发明的技术方案是:一种基于塔吊平衡臂配重运动的平衡控制方法,包括以下步骤:
3、s1:获取塔吊的起重臂力矩和平衡臂力矩;
4、s2:根据起重臂力矩和平衡臂力矩获取平衡臂配重小车的位置,并根据塔吊的工作状态自动调节配重小车的位置;
5、s3:判断当所述起重臂力矩与平衡臂力矩之差大于高阈值时,平衡臂配重变频器驱动交流电机高速运动;当起重臂力矩与平衡臂力矩之差大于中阈值时,平衡臂配重变频器驱动交流电机中速运动;当起重臂力矩与平衡臂力矩之差大于低阈值且小于中阈值时,平衡臂配重变频器驱动交流电机低速运动;当起重臂力矩与平衡臂力矩之差小于低阈值时,塔吊处于平衡状态,各运动器件保持不变。
6、进一步,还包括步骤s4:塔吊的主钩起吊,主钩变频器驱动主钩交流电机缓慢起钩,重复步骤s1~s3,直到达到新的平衡状态。
7、进一步,还包括步骤s5:当主钩吊物离地,主钩变频器驱动主钩交流电机以正常速度起钩,重复步骤s1~s3,直到达到新的平衡状态。
8、进一步,还包括步骤s6:当主钩吊物到达安全高度,主钩小车变频器驱动主钩交流电机正常前进或后退,重复步骤s1~s3,直到达到新的平衡状态。
9、进一步,还包括步骤s7:在自平衡过程中,平衡臂配重小车、主钩到达前、后极限时,分别由位移传感器限值、行程开关限位和机械限位三道保护,同时报警提醒。
10、进一步,步骤s1中,所述起重臂力矩m1通过以下公式获得:m1=g1╳l1;所述平衡臂的力矩m2通过以下公式获得:m2=g2╳l2;
11、式中,g1为起重臂桁架的重力,l1为起重臂的重心至塔身中心的距离;g2为平衡臂桁架的重力,l2为平衡臂的重心至塔身中心的距离。
12、进一步,s2中,根据起重臂力矩m1和平衡臂力矩m2,获得:m1+g3╳ l3= m2+ g4╳ l4;
13、式中,g3为吊重重物的重力,l3为吊重重物的重心至塔身中心的距离;g4为配重小车的重力,l4为配重小车的重心至塔身中心的距离;通过动态计算吊重重物力矩与起重臂力矩之和、再与平衡臂力矩之差,然后根据配重小车的重力,反算出配重小车的位置。
14、进一步,s3中,所述高阈值为200kn.m或小于-200kn.m;中阈值为75kn.m或小于-75kn.m;低阈值为50kn.m或小于-50kn.m。
15、进一步,s3中,所述交流电机高速运动范围为28-32hz,中速运动范围为23-27hz,低速运动范围为18-22hz。
16、进一步,l1和l2分别通过起重臂和平衡臂上的位移传感器测量的位移数据计算得到重心位置;吊重重物的重力通过起重侧拉力传感器值获取;吊重重物的重心至塔身中心的距离l3根据起重侧拉力传感器值和位移传感器中心位移量计算得到。
17、本发明的有益效果:一方面通过起重臂力矩和平衡臂力矩获得配重小车位置,并根据起重臂力矩与平衡臂力矩之差与不同阈值的比较来控制平衡臂配重变频器驱动交流电机以相应速度动作,使配重小车进行自动调节,大大提高响应速度、稳定性以及调节精准度,且可视性好,操作简单,算法简单,智能化程度高,维护方便,适应性强等优点,能适应各种不同工况,保证塔吊安全工作;另一方面,在主钩起吊、吊物离地、吊物道道安全高度的过程中均自动调节配重小车的位置,保证塔吊的安全性和稳定性;再者,在自平衡过程中通过设置三道保护,能够大大提高配重小车和主钩小车到达极限位置的精准性、安全性和可靠性。
技术特征:
1.一种基于塔吊平衡臂配重运动的平衡控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述基于塔吊平衡臂配重运动的平衡控制方法,其特征在于,还包括步骤s4:塔吊的主钩起吊,主钩变频器驱动主钩交流电机缓慢起钩,重复步骤s1~s3,直到达到新的平衡状态。
3.根据权利要求2所述基于塔吊平衡臂配重运动的平衡控制方法,其特征在于,还包括步骤s5:当主钩吊物离地,主钩变频器驱动主钩交流电机以正常速度起钩,重复步骤s1~s3,直到达到新的平衡状态。
4.根据权利要求3所述基于塔吊平衡臂配重运动的平衡控制方法,其特征在于,还包括步骤s6:当主钩吊物到达安全高度,主钩小车变频器驱动主钩交流电机正常前进或后退,重复步骤s1~s3,直到达到新的平衡状态。
5.根据权利要求4所述基于塔吊平衡臂配重运动的平衡控制方法,其特征在于,还包括步骤s7:在自平衡过程中,平衡臂配重小车、主钩到达前、后极限时,分别由位移传感器限值、行程开关限位和机械限位三道保护,同时报警提醒。
6.根据权利要求1~5任一项所述基于塔吊平衡臂配重运动的平衡控制方法,其特征在于,步骤s1中,所述起重臂力矩m1通过以下公式获得:m1=g1╳l1;所述平衡臂的力矩m2通过以下公式获得:m2=g2╳l2;
7.根据权利要求6所述基于塔吊平衡臂配重运动的平衡控制方法,其特征在于,s2中,根据起重臂力矩m1和平衡臂力矩m2,获得:m1 +g3╳ l3= m2+ g4╳ l4;
8.根据权利要求1~5任一项所述基于塔吊平衡臂配重运动的平衡控制方法,其特征在于,s3中,所述高阈值为200kn.m或小于-200kn.m;中阈值为75kn.m或小于-75kn.m;低阈值为50kn.m或小于-50kn.m。
9.根据权利要求1~5任一项所述基于塔吊平衡臂配重运动的平衡控制方法,其特征在于,s3中,所述交流电机高速运动范围为28-32hz,中速运动范围为23-27hz,低速运动范围为18-22hz。
10.根据权利要求7所述基于塔吊平衡臂配重运动的平衡控制方法,其特征在于,l1和l2分别通过起重臂和平衡臂上的位移传感器测量的位移数据计算得到重心位置;吊重重物的重力通过起重侧拉力传感器值获取;吊重重物的重心至塔身中心的距离l3根据起重侧拉力传感器值和位移传感器中心位移量计算得到。
技术总结
一种基于塔吊平衡臂配重运动的平衡控制方法,包括以下步骤:S1:获取塔吊的起重臂力矩和平衡臂力矩;S2:根据起重臂力矩和平衡臂力矩获取平衡臂配重小车的位置,并根据塔吊的工作状态自动调节配重小车的位置;S3:判断当所述起重臂力矩与平衡臂力矩之差大于高阈值时,平衡臂配重变频器驱动交流电机高速运动;当起重臂力矩与平衡臂力矩之差大于中阈值时,平衡臂配重变频器驱动交流电机中速运动;当起重臂力矩与平衡臂力矩之差大于低阈值且小于中阈值时,平衡臂配重变频器驱动交流电机低速运动;当起重臂力矩与平衡臂力矩之差小于低阈值时,塔吊处于平衡状态,各运动器件保持不变。本发明能够大大提高响应速度、稳定性以及调节精准度。
技术研发人员:张跃
受保护的技术使用者:远大可建科技有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!