一种风电塔筒爬壁机器人安全绳的卷扬系统的制作方法
本发明是一种风电塔筒爬壁机器人安全绳的卷扬系统,属于卷扬系统领域。
背景技术:
1、磁吸附爬壁机器人在进行风电塔筒外壁进行高空作业时,百米高空风速较大,在越过焊缝或者在曲面上转弯时,可能存在磁吸轮或者磁吸履带与塔筒外壁发生打滑跌落的风险。传统的卷扬系统只能收放绳索,无法检测绳索的张力,绳索张力过大会对吸附在塔筒外壁的爬壁机器人施加拉力,反而存在使爬壁机器人跌落的风险。另外,爬壁机器人会横向运动,由于卷扬系统位置固定,安全绳索呈非垂直状态,一旦机器人发生跌落,由于重力作用,机器人在空中会发生较大的横向摆动,出现撞击风险更大。
技术实现思路
1、针对现有技术存在的不足,本发明目的是提供一种风电塔筒爬壁机器人安全绳的卷扬系统。
2、为了实现上述目的,本发明是通过如下的技术方案来实现:
3、一种风电塔筒爬壁机器人安全绳的卷扬系统,包括手持遥控器、卷扬控制器、张力传感器、一体化伺服驱动器和卷扬装置,所述卷扬装置机壳外表面一侧设有清理机构,所述卷扬装置包括卷扬装置机壳、绕线机构、排线机构、抽线机构和旋转底座,所述卷扬控制器、所述一体化伺服驱动器和张力传感器和所述张力传感器均位于所述卷扬装置机壳内部。
4、进一步地,所述绕线机构包括绕线机构支架,所述绕线机构支架固定所述卷扬装置机壳内底部,所述绕线机构支架上活动连接有转轴一,所述转轴一上设有卷筒,所述卷筒上缠绕有安全绳,所述转轴一的另一端贯穿至所述绕线机构支架的外侧与减速器连接,所述减速器与绕线机构伺服电机输出端连接。
5、进一步地,所述排线机构包括排线支架,所述排线支架设置在所述卷扬装置机壳内顶部,所述排线支架内设有滚珠丝杠,所述排线支架的端部设有排线机构伺服电机,所述排线机构伺服电机的输出端与所述滚珠丝杠连接,所述滚珠丝杠上螺纹连接有丝杆滑块,所述丝杆滑块的底部连接有排线器,所述排线器的底部两端均设有线轮,所述排线器设有与所述线轮相配合的压紧器;
6、所述压紧器包括竖向滑动连接在所述排线器内的支撑件一和固定在所述排线器内中部的推拉电磁铁一,所述支撑件一的中部与所述推拉电磁铁一连接,所述支撑件一的两端均设有压紧轮一,所述压紧轮一位于所述线轮的上方。
7、进一步地,所述抽线机构包括抽线支架,所述抽线支架与所述排线支架连接固定,所述抽线支架的顶部设有抽线机构伺服电机,所述抽线机构伺服电机的输出端设有皮带轮,所述抽线支架内部转动连接有转轴二,所述转轴二的中部固定有同步轮,所述同步轮与所述皮带轮之间通过皮带连接,所述转轴二的两端分别设有一个动力轮,所述抽线支架的内部竖向滑动有支撑件二,所述支撑架的两端分别设有一个压紧轮二,所述压紧轮二位于所述动力轮的下方,所述抽线支架的内底部设有与所述支撑件二相配合的推拉电磁铁二,所述抽线支架远离所述排线支架一侧和张力传感器连接固定,所述张力传感器顶部连接在从动滑轨上,所述从动滑轨固定在所述卷扬装置机壳内顶部。
8、进一步地,所述安全绳依次穿过所述压紧轮一和所述线轮之间的间隙、所述压紧轮二、所述动力轮之间的间隙和所述张力传感器贯穿至所述卷扬装置机壳外侧,所述卷扬装置机壳上开设有安全绳出口,所述安全绳通过所述安全绳出口贯穿至所述卷扬装置机壳外侧,所述卷扬装置机壳外侧设有与所述安全绳相配合的限位开关和安全绳横档。
9、进一步地,所述旋转底座包括旋转底座支架,所述旋转底座支架底部中心处设有吸附电磁铁,所述吸附电磁铁吸附在风电塔筒顶部,所述旋转底座支架的顶部设有旋转台,所述旋转台的顶部固定有固定支撑板,所述固定支撑板的顶部与所述卷扬装置机壳底部的连接电磁铁固定在一起,所述旋转底座支架侧边固定有旋转伺服电机和蜗轮蜗杆系统,所述旋转伺服电机和所述蜗轮蜗杆系统连接在一起,所述蜗轮蜗杆系统和所述旋转台连接。
10、进一步地,所述清理机构包括固定在所述卷扬装置机壳上的安装座,所述安装座上活动连接有壳体,所述壳体底部设有开口,所述壳体内中部设有固定箱,所述固定箱内中部设有双轴电机,所述双轴电机的两侧输出端均设有主动锥形齿轮,所述主动锥形齿轮的两侧均啮合有从动锥形齿轮,所述从动锥形齿轮的端部固定有旋转杆,所述旋转杆活动连接在固定板一上,所述旋转杆上固定有驱动齿轮,所述固定板一的端部贯穿至所述固定箱的外侧,所述壳体的内部两侧内壁上均固定有与所述固定板一相配合的固定板二,所述固定板一和所述固定板二两者上均设有支撑杆,两组所述支撑杆之间活动连接有清理件,所述清理件由环形件和外齿环组成,所述外齿环固定在所述环形件的圆周外表面,所述驱动齿轮与所述外齿环相啮合,所述环形件的侧边外表面开设有与所述支撑杆相配合的环形槽,所述环形件的中部开设有清理孔,所述清理孔内壁上等间距设有若干个清理刷,所述壳体上开设有与所述清理孔相配合的通孔,所述壳体内部两侧均设有与所述安全绳相配合的导向轮,所述安全绳通过所述通孔贯穿至所述壳体内部经过所述清理孔与所述导向轮延伸至外界。
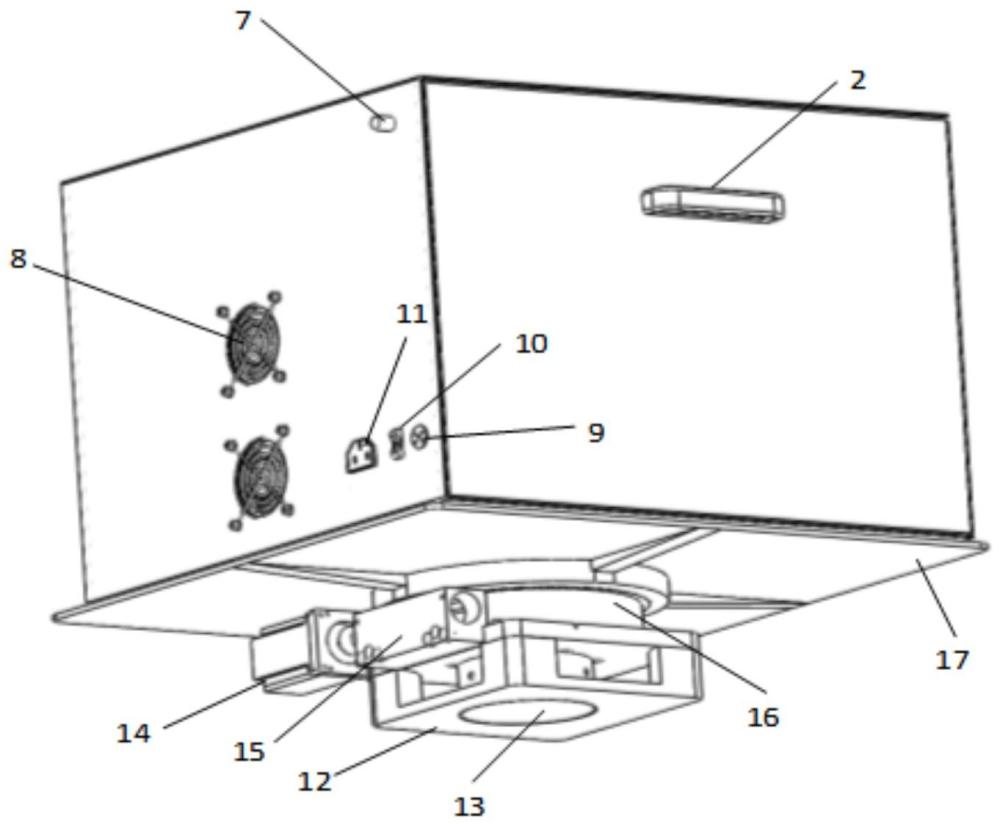
11、进一步地,所述卷扬控制器包括卷扬控制器主控模块和无线接收模块,所述卷扬控制器主控模块和所述无线接收模块两者设置在所述绕线机构支架上,所述卷扬装置机壳外侧设有提手、无线天线、驱动器散热风扇、过线孔护套、开关和电源接口。
12、根据本发明另一个方面,提供了一种风电塔筒爬壁机器人安全绳的卷扬系统使用方法,用于所述的风电塔筒爬壁机器人安全绳的卷扬系统,包括以下步骤:
13、步骤s401:将卷扬装置固定在旋转底座上,连接旋转底座通信电缆,系统通电;
14、步骤s402:打开旋转底座电磁铁开关,使旋转底座吸附在风电塔机舱顶面;
15、步骤s403:开启手持遥控器,使手持遥控器与卷扬系统连接匹配;
16、步骤s404:触发手持遥控器上的自动放伸按键,卷扬装置上的卷筒放开安全绳,当安全绳抵达地面时,停止放绳;
17、步骤s405:将安全绳与爬壁机器人上的安全吊环连接,触发手持遥控器上的手动收绳按键,将安全绳索调整到合适长度;
18、步骤s406:机器人开始在塔筒外壁爬行作业,触发手持遥控自主控制按键,通过安全绳张力控制自主调整安全绳收放;
19、步骤s407:当爬壁机器人水平移动时,通过手持遥控器上的旋转按键,控制卷扬装置旋转,使安全绳接近垂直状态;
20、步骤s408:机器人作业结束时,将安全绳索从机器人上取下,触发手持遥控器上的自动收绳按键,将安全绳收紧。
21、本发明的有益效果:
22、本发明提供的安全绳卷扬系统通过张力传感系统感知安全绳张紧力,通过主控模块控制排线机构、绕线机构和抽线机构运行,从而控制安全绳的自动收紧和放开,保护爬壁机器人在高空作业安全。
23、本发明通过张力传感器检测安全绳的张紧力,并反馈给卷扬控制器主控模块,根据设定的张紧力阈值自动控制安全绳的收放,避免安全绳对正常运行的爬壁机器人施加拉力。
24、本发明通过旋转底座的设计,当爬壁机器人在风电塔筒壁上横向移动时,可以控制卷扬装置沿相同方向旋转,确保安全绳始终接近垂直状态,避免在机器人跌落时出现较大的横向摆动,导致与塔筒壁发生强烈的撞击。
25、通过绕线机构的设计,绕线机构的控制伺服驱动器接收卷扬控制器主控模块的信号,控制绕线机构伺服电机的旋转方向和速度,从而控制卷筒收紧或者放开安全绳。
26、通过排线机构的设计,通过控制排线机构上推拉电磁铁一的通电/断电,来实现压紧轮一的压合与松开动作,即,推拉电磁铁一通电压紧轮一松开,推拉电磁铁一断电压紧轮一压紧在线轮的线孔上,排线机构的控制伺服驱动器接收卷扬控制器主控模块的信号,控制排线机构伺服电机的旋转方向和速度,使丝杠滑块在行程范围内左右移动,从而实现安全绳在卷筒上有规律缠绕。
27、通过张力传感器的设计,当张力传感器检测到安全绳张力过大时,卷扬控制器控制卷筒放开安全绳,同时控制推拉电磁铁二断电放下压紧轮二压紧安全绳,动力轮开始旋转将放开的安全绳抽出;当张力传感器检测到安全绳张力过小时,控制推拉电磁铁二通电抬起压紧轮二脱离安全绳,动力轮停止旋转,卷扬控制器控制卷筒收紧安全绳。
28、通过将张力传感器设置在从动滑轨上的设置方式,用于监测安全绳的张紧力,通过rs485总线将监测数据传送给卷扬控制器主控模块,卷扬控制器主控模块将测量数据与设定阈值进行比对计算并控制绕线机构收紧或者放开安全绳。
29、通过吸附电磁铁与连接电磁铁的设计,从而可以将卷扬装置固定于风电塔机舱顶面,使其下垂的安全绳能够承受几百公斤的重物。
30、通过旋转底座的设计,可以控制卷扬装置旋转,进而在爬壁机器人在塔筒壁横向移动时,使安全绳与爬壁机器人的连接始终接近垂直状态。
31、通过清理机构的设计,从而在绕线机构收卷安全绳时,因为安全绳在使用时会粘附一些灰尘或者鸟屎等附着物,在收卷安全绳时,启动双轴电机,双轴电机带动两侧的主动锥形齿轮旋转,主动锥形齿轮通过从动锥形齿轮带动旋转杆旋转,旋转杆旋转带动驱动齿轮旋转,驱动齿轮旋转通过与外齿环的啮合带动清理件旋转,清理件旋转带动清理孔内的清理刷旋转,安全绳在收卷时会经过清理孔,进而使得清理刷可以对安全绳外表面的附着物进行清扫,进而避免附着物进入到卷扬装置机壳内部。
- 还没有人留言评论。精彩留言会获得点赞!