一种多维度移载小车的制作方法
本技术涉及输送、移载设备,特别涉及一种多维度移载小车。
背景技术:
1、目前国内移载设备多应用于简单的生产应用场合,单一的路径,固定的流程,多数只是用来进行搬运,各制造企业均突出差异化或个性化,多以制作非标且无序竞争,各式制作结构相对多样,产品技术门槛复杂多变,在制造精度、工艺、专一性都存在不同偏差,缺少统一移载系统对接。
2、现有物料移载输送技术多以行吊为主,执行单一的行程往复吊运移载或装配,其行程控制多以手动控制为主,其移载过程中不能执行智能控制及多维度行走和旋转。
3、现有挂置式移载轨道刹车技术多以气缸连接刹车片直接触碰轨道,在刹车过程中适时存在刹车气缸断裂及刹车震动现象,造成移载物料往复摆动,极易出现碰撞及隐患。
4、现有挂置式轨道输送移载小车技术,其行程多以x\y\z方向来回往复运转,有的只有横向移载及升降功能,其多角度旋转移载控制功能存在瓶颈。
技术实现思路
1、本实用新型的目的在于设计一种多维度移载小车,可实现多维度运动,可建立柔性移载系统平台,提升搬运、输送、移载、装配、上料等智能移载设备的柔性对接水平,降低成本,实现移载设备非标个性化向统一柔性化对接转变。
2、为达到上述目的,本实用新型的技术方案是:
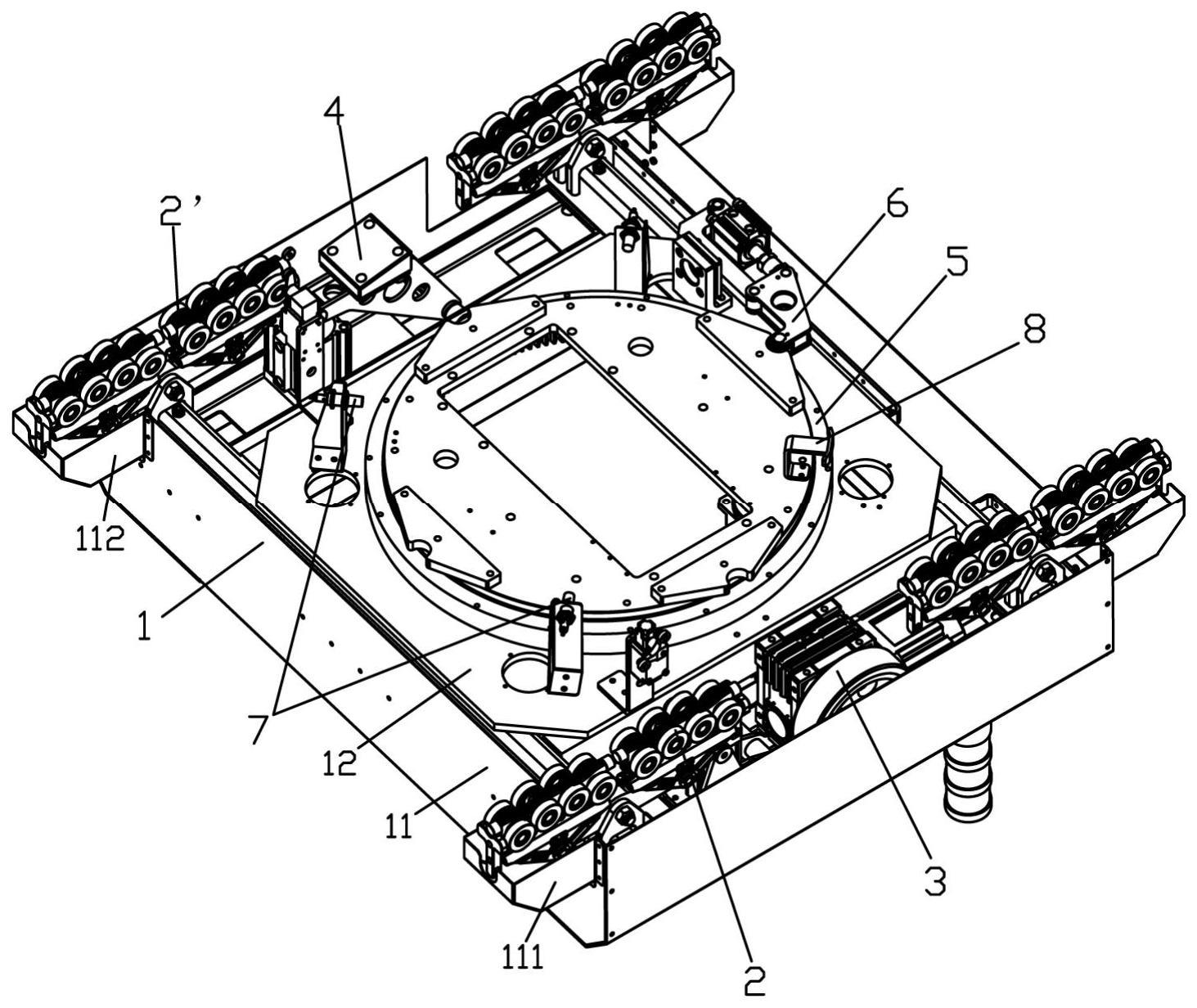
3、一种多维度移载小车,其包括:
4、基座,主要由固定框架及其上的固定板组成;所述固定板中设一安装通孔;
5、若干行走轮,对称设置于基座固定框架上相对布置的第一边框、第二边框上;
6、驱动机构,包括:
7、支撑架,其中部通过转轴活动连接于所述基座固定框架安装行走轮的第一边框的中部,形成杠杆结构;
8、驱动电机及减速机,通过安装支架安装于所述支撑架的一侧上端面;
9、驱动轮,设置于所述减速机输出端;
10、调节气缸,通过一固定架安装于所述支撑架另一侧的第一边框上,
11、调节气缸输出端向下设置,且,该输出端端部连接伸入固定架内的支撑架的另一侧端;
12、行走刹车装置,设置于基座固定框架的第二边框上,与行走轮同轴线布置;
13、旋转机构,包括:
14、转盘轴承,设置于所述基座固定板上对应安装通孔处;
15、旋转电机及减速机,设置于移载设备上,位于转盘轴承内圈内侧;
16、旋转驱动齿轮,与转盘轴承内圈啮合,并安装于减速机输出端;
17、旋转定位装置,安装于所述基座固定板上,包括:
18、支撑板,设置于所述旋转机构的转盘轴承内圈上端面,随内圈转动;
19、至少一定位板,设置于所述支撑板上端面一侧,所述定位板外侧面设定位凹槽;
20、定位块,安装于一定位气缸的活塞杆端部,定位气缸安装于所述基座固定板上一侧,定位块对应所述定位板的定位凹槽;
21、控制器,所述驱动电机、调节气缸、旋转电机、定位气缸均电性连接该控制器。
22、优选的,所述定位气缸通过一固定支架及固定座安装于所述基座固定板上一侧;该固定支架为l形杆,所述定位气缸缸体后端枢轴连接于该固定支架的一端;固定支架的另一端枢轴连接于一个三角形连接支架的一节点,所述定位气缸的活塞杆端部枢轴连接于所述连接支架的另一节点;所述定位块设置于连接支架的第三节点。
23、优选的,所述定位块为一滚轮,并枢轴连接于所述连接支架的第三节点,所述定位板的定位凹槽为凹弧形。
24、优选的,所述定位板设有四块,沿支撑板周向均匀设置于支撑板上。
25、优选的,设有三个位置传感器,分别沿支撑板周向设置于所述基座的固定板上;对应的,所述支撑板上设一与位置传感器配合的感应板;所述位置传感器电性连接所述控制器。
26、优选的,所述三个位置传感器和感应板沿支撑板周向均匀布置,或,所述三个位置传感器沿支撑板周向以90度圆心角间隔布置。
27、优选的,所述行走刹车装置包括:
28、支撑杆,呈l形,其一端通过转轴活动连接于所述基座固定框架的第二边框上;
29、行走刹车气缸,安装于第二边框上,其活塞杆向上,活塞杆端部连接所述支撑杆另一端;所述行走刹车气缸电性连接所述控制器;
30、刹车块,设置于支撑杆连接行走刹车气缸一侧边的上端面。
31、优选的,所述转盘轴承为交叉滚子转盘轴承。
32、优选的,所述旋转电机为伺服电机。
33、与现有技术相比,本实用新型所具有的优点或积极效果:
34、本实用新型通过设计行走、旋转机构以及相应的控制机构,解决了移载设备单一往复作业瓶颈,提升了物料移载的全方位多角度输出与供给,改善了移载设备及工艺,减少了物料移载过程中人为操作,促进了柔性移载系统平台技术的创新突破,有效推进物料搬运、输送、移载、装配、上料等智能移载设备的柔性对接,确保移载小车多维度移载、运转、安全、智控,降低成本,提质增效,实现移载设备柔性化。
技术特征:
1.一种多维度移载小车,其特征在于,包括:
2.如权利要求1所述的多维度移载小车,其特征在于,所述气缸通过一固定支架及固定座安装于所述基座固定板上一侧;该固定支架为l形杆,所述气缸缸体后端枢轴连接于该固定支架的一端;固定支架的另一端枢轴连接于一个三角形连接支架的一节点,所述气缸的活塞杆端部枢轴连接于所述连接支架的另一节点;所述定位块设置于连接支架的第三节点。
3.如权利要求2所述的多维度移载小车,其特征在于,所述定位块为一滚轮,并枢轴连接于所述连接支架的第三节点,所述定位板的定位凹槽为凹弧形。
4.如权利要求1或2所述的多维度移载小车,其特征在于,所述定位板设有四块,沿支撑板周向均匀设置于支撑板上。
5.如权利要求4所述的多维度移载小车,其特征在于,设有三个位置传感器,分别沿支撑板周向设置于所述基座的固定板上;对应的,所述支撑板上设一与位置传感器配合的感应板;所述位置传感器电性连接所述控制器。
6.如权利要求5所述的多维度移载小车,其特征在于,所述三个位置传感器和感应板沿支撑板周向均匀布置,或,所述三个位置传感器沿支撑板周向以90度圆心角间隔布置。
7.如权利要求1所述的多维度移载小车,其特征在于,所述行走刹车装置包括:
8.如权利要求1所述的多维度移载小车,其特征在于,所述转盘轴承为交叉滚子转盘轴承。
9.如权利要求1所述的多维度移载小车,其特征在于,所述旋转电机为伺服电机。
技术总结
一种多维度移载小车,包括:基座,由固定框架、固定板组成;若干行走轮,设于固定框架边框;驱动机构,包括支撑架,设于固定框架一侧边框;驱动电机、减速机及驱动轮,安装于支撑架一侧;调节气缸,设于支撑架另一侧边框,其输出端向下并连接支撑架另一侧端;行走刹车装置,设于固定框架边框;旋转机构,包括:转盘轴承,设于固定板对应安装通孔处;旋转电机及减速机,位于转盘轴承内圈内侧;旋转驱动齿轮,与转盘轴承内圈啮合;旋转定位装置,包括:支撑板,设于转盘轴承内圈上端面;至少一定位板,设于支撑板上端面一侧;定位块,安装于一定位气缸活塞杆端部,定位气缸安装于基座固定板上一侧;控制器。
技术研发人员:李建荣,秦凯林,侯磊
受保护的技术使用者:上海永乾机电有限公司
技术研发日:20230303
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!