一种抓取机构的制作方法
本技术涉及工装夹具,具体涉及一种抓取机构。
背景技术:
1、传统加工生产工艺中,物料的转运分为人工操作和自动化操作,涉及自动化物料转运流通时,需要对物料或工件进行抓取,由于物料或工件结构不一,如何稳固抓取是需要解决的技术问题之一。其次,抓取的工件是为了用于后续加工,因此在抓取过程中,需要同时调整物料或工件的朝向、位置,使得物料或工件的摆放利于下一道工序。
2、以线圈骨架为例,线圈骨架用于缠绕线圈,线圈骨架的结构呈筒状,两端具备半径较大的挡圈环,在物料流转时,后续的加工工艺决定了当前的夹取方式,因此如何需要使得线圈骨架稳定准确地抓取和放下后的正确摆位成了待解决的技术问题。
技术实现思路
1、实用新型要解决的技术问题
2、针对工件抓取效果不好的技术问题,本实用新型提供了一种抓取机构,它可以实现物料稳定准确地抓取和放下后的正确摆位。
3、技术方案
4、为解决上述问题,本实用新型提供的技术方案为:
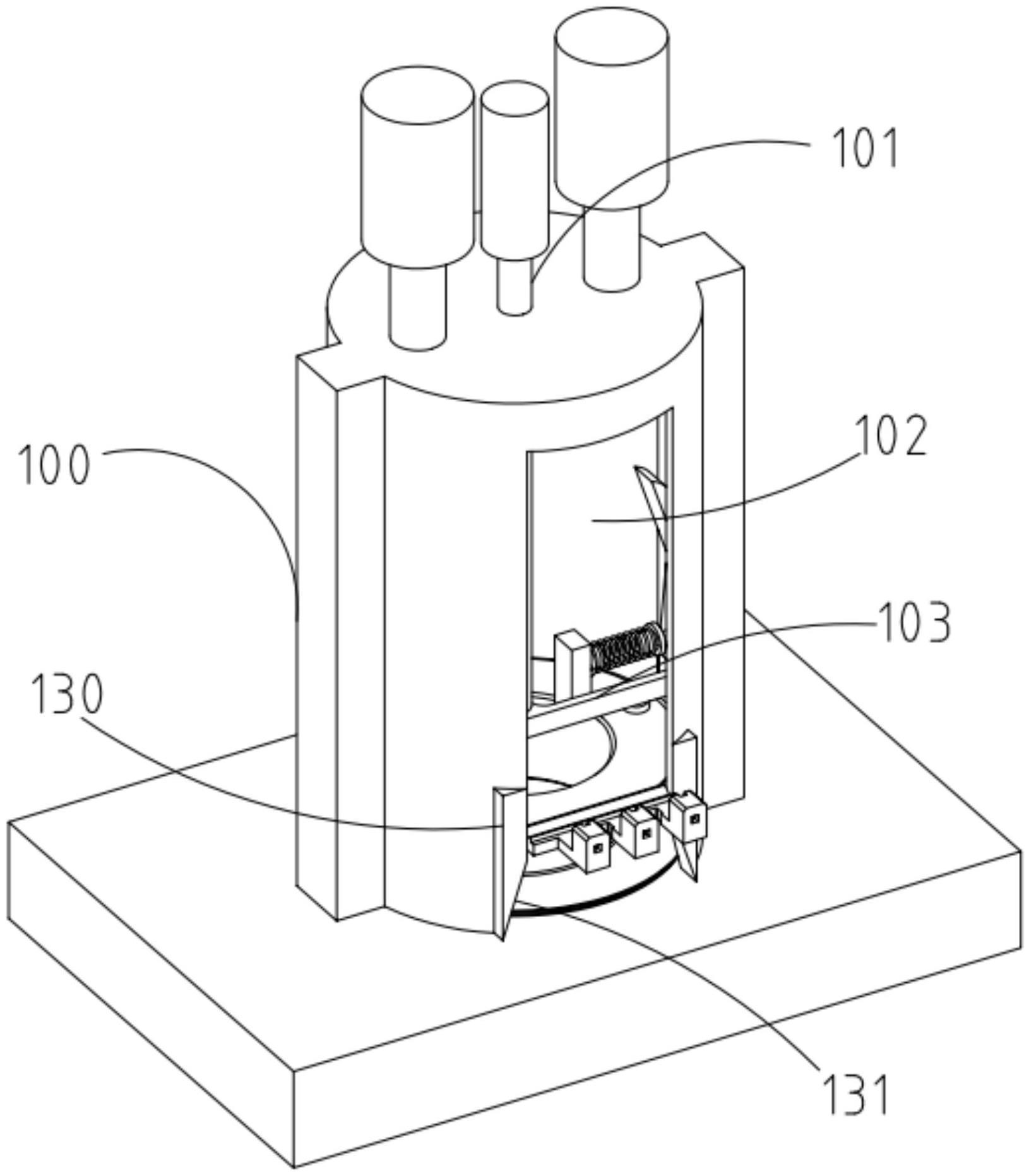
5、一种抓取机构,包括套取壳体和活动杆,所述套取壳体一侧设置有定位槽口,所述套取壳体顶部设置有滑动孔,所述活动杆与滑动孔活动配合;所述活动杆位于壳体内的端部设置有支架,所述支架上两端设置有夹取杆,所述夹取杆上设置有第一固定部,所述支架上设置有第二固定部,所述第一固定部和第二固定部之间设置有弹性件;所述夹取杆包括导向部和夹取部,所述导向部与夹取部之间存在夹角,各所述夹取部与支架两端铰接,所述夹取部端部设置有钩爪;所述套取壳体顶部设置有导向槽,所述导向槽与导向部匹配设置。
6、可选的,所述钩爪包括接触平面。
7、可选的,所述导向槽包括导向面,所述导向部包括接触斜面,当接触平面水平时,所述接触斜面与水平面之间的夹角,大于导向面与水平面的夹角。
8、可选的,所述导向部的端部设置有过渡圆角,所述过渡圆角与导向槽匹配设置。
9、可选的,所述钩爪外侧设置有引导圆角。
10、可选的,所述活动杆位于套取壳体外侧的一侧设置有第一伸缩气缸,所述第一伸缩气缸的输出端与活动杆的端部固定连接。
11、可选的,所述套取壳体顶部设置有第二伸缩气缸,所述伸缩气缸输出端与套取壳体顶部固定连接;所述套取壳体上设置有导向杆,所述套取壳体一侧设置有导向套,所述导向套与导向杆匹配设置。
12、可选的,所述套取壳体内设置有限位槽,所述夹取杆与限位槽滑动配合。
13、可选的,所述定位槽口的端部设置有定位块,所述定位块上设置有定位斜面。
14、可选的,所述套取壳体一侧设置有传送件。
15、有益效果
16、采用本实用新型提供的技术方案,与现有技术相比,具有如下有益效果:
17、针对工件抓取效果不好的技术问题,本实用新型可以实现物料稳定准确地抓取和放下后的正确摆位。
技术特征:
1.一种抓取机构,其特征在于,包括套取壳体和活动杆,所述套取壳体一侧设置有定位槽口,所述套取壳体顶部设置有滑动孔,所述活动杆与滑动孔活动配合;所述活动杆位于壳体内的端部设置有支架,所述支架上两端设置有夹取杆,所述夹取杆上设置有第一固定部,所述支架上设置有第二固定部,所述第一固定部和第二固定部之间设置有弹性件;
2.根据权利要求1所述的一种抓取机构,其特征在于,所述钩爪包括接触平面。
3.根据权利要求2所述的一种抓取机构,其特征在于,所述导向槽包括导向面,所述导向部包括接触斜面,当接触平面水平时,所述接触斜面与水平面之间的夹角,大于导向面与水平面的夹角。
4.根据权利要求1所述的一种抓取机构,其特征在于,所述导向部的端部设置有过渡圆角,所述过渡圆角与导向槽匹配设置。
5.根据权利要求1所述的一种抓取机构,其特征在于,所述钩爪外侧设置有引导圆角。
6.根据权利要求1所述的一种抓取机构,其特征在于,所述活动杆位于套取壳体外侧的一侧设置有第一伸缩气缸,所述第一伸缩气缸的输出端与活动杆的端部固定连接。
7.根据权利要求1所述的一种抓取机构,其特征在于,所述套取壳体顶部设置有第二伸缩气缸,所述伸缩气缸输出端与套取壳体顶部固定连接;所述套取壳体上设置有导向杆,所述套取壳体一侧设置有导向套,所述导向套与导向杆匹配设置。
8.根据权利要求7所述的一种抓取机构,其特征在于,所述套取壳体内设置有限位槽,所述夹取杆与限位槽滑动配合。
9.根据权利要求1所述的一种抓取机构,其特征在于,所述定位槽口的端部设置有定位块,所述定位块上设置有定位斜面。
10.根据权利要求1-9任一项所述的一种抓取机构,其特征在于,所述套取壳体一侧设置有传送件。
技术总结
本技术涉及工装夹具技术领域,具体涉及一种抓取机构。包括套取壳体和活动杆,所述套取壳体一侧设置有定位槽口,所述套取壳体顶部设置有滑动孔,所述活动杆与滑动孔活动配合;所述活动杆位于壳体内的端部设置有支架,所述支架上两端设置有夹取杆,所述夹取杆上设置有第一固定部,所述支架上设置有第二固定部,所述第一固定部和第二固定部之间设置有弹性件;所述夹取杆包括导向部和夹取部,所述导向部与夹取部之间存在夹角,各所述夹取部与支架两端铰接,所述夹取部端部设置有钩爪;所述套取壳体顶部设置有导向槽,所述导向槽与导向部匹配设置。针对工件抓取效果不好的技术问题,本技术可以实现物料稳定准确地抓取和放下后的正确摆位。
技术研发人员:蓝徐彬,赵振英,严敏润
受保护的技术使用者:浙江辰午电子科技有限公司
技术研发日:20230321
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!