一种基于视觉识别的智能化搬运装置
本技术涉及智能机器人领域,尤其涉及一种基于视觉识别的智能化搬运装置。
背景技术:
1、随着网络快速发展使得电商行业兴起,发展出越来越多大规模的仓库,大规模仓库存储货物量大,且范围宽广搬运货物不便,传统的人工搬运效率低下且成本高,因此会使用到智能化搬运装置。
2、现有的智能化搬运装置,通常是通过人工将货物搬运到自动移动搬运车上,然后自动移动搬运车装载货物进行搬运至指定位置,但现有的难以对货物进行辅助搬运并卡紧限位,货物较大较重时,会消耗大量的人力并且搬运耗费的时间长,当货物堆放不平整,在运输过程中容易发生意外情况,导致工作效率低下。
3、因此针对上述问题现在研发出一种能够对货物进行辅助搬运并卡紧限位,节约人力搬运的基于视觉识别的智能化搬运装置。
技术实现思路
1、为了克服现有的难以对货物进行辅助搬运并卡紧限位,的缺点,本实用新型提供一种能够对货物进行辅助搬运并卡紧限位,节约人力搬运的基于视觉识别的智能化搬运装置。
2、本实用新型的技术实施方案为:一种基于视觉识别的智能化搬运装置,包括有自动移动搬运车、识别探头、缓冲板、弹性件和辅助搬运卡紧机构,自动移动搬运车前部连接有识别探头,识别探头能够识别前进道路,自动移动搬运车中部左右两侧均连接有缓冲板,缓冲板与自动移动搬运车之间均连接有多个弹性件,自动移动搬运车上设有对货物辅助搬运和卡紧固定的辅助搬运卡紧机构。
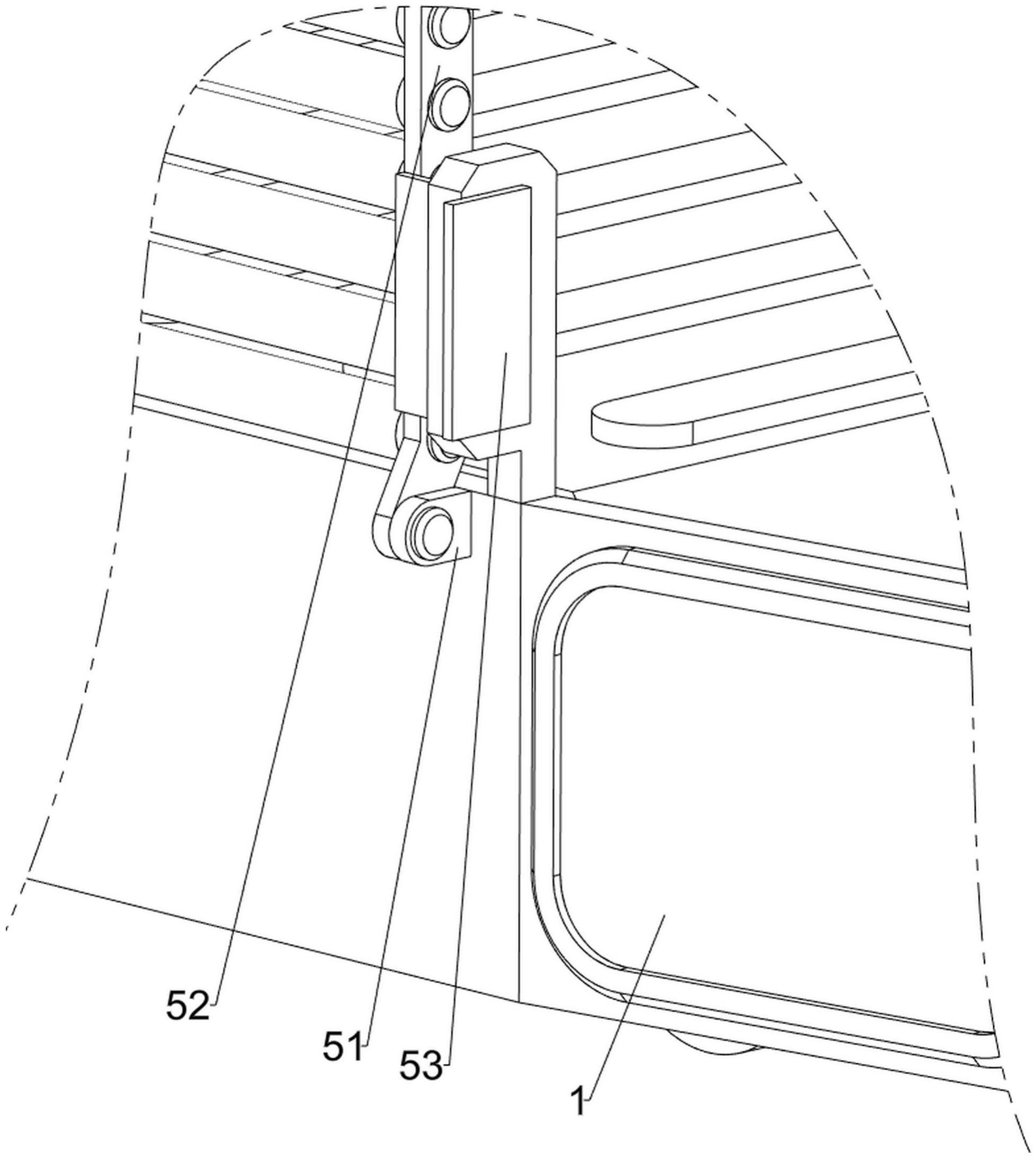
3、作为更进一步的优选方案,辅助搬运卡紧机构包括有连接件、辅助搬运件和固定件,自动移动搬运车上部左右两侧均连接有多个连接件,同侧连接件上部之间均转动式连接有辅助搬运件,自动移动搬运车前后两部均卡接有多个固定件,移动固定件,固定件与辅助搬运件脱离,然后转动打开辅助搬运件,货物通过辅助搬运件进行辅助搬运,货物搬运到自动移动搬运车上之后,转动关闭辅助搬运件,移动固定件与辅助搬运件连接,对货物进行卡紧。
4、作为更进一步的优选方案,还包括有固定机构,固定机构包括有滑槽座、滑动件、绑带、转动件、扭簧和卡紧轮,自动移动搬运车前后两部上侧均连接有滑槽座,滑槽座左右两部上侧均滑动式连接有滑动件,左右两部的滑动件之间均连接有绑带,滑动件上均转动式连接有转动件,转动件与滑动件之间均连接有多个扭簧,转动件上均连接有卡紧轮,移动滑动件在滑槽座上进行移动,移动至合适位置之后,转动转动件带动卡紧轮与绑带脱离,绑带对货物进行绑紧固定,固定完成之后,松开转动件,在扭簧的作用下,转动件带动卡紧轮与绑带连接,对绑带进行固定卡紧。
5、作为更进一步的优选方案,自动移动搬运车上连接有防护条。
6、作为更进一步的优选方案,弹性件为弹簧,缓冲板与自动移动搬运车之间均连接有多个弹簧。
7、作为更进一步的优选方案,转动件上连接有橡胶条。
8、本实用新型的有益效果为:1、本实用新型通过移动固定件,固定件与辅助搬运件脱离,然后转动打开辅助搬运件,货物通过辅助搬运件搬运到自动移动搬运车上,之后转动复位辅助搬运件,移动固定件与辅助搬运件卡接,从而达到了能够对货物进行辅助搬运并卡紧限位,节约人力搬运的效果。
9、2、本实用新型通过使用绑带对货物进行绑紧固定,固定完成之后,松开转动件,在扭簧的作用下,转动件带动卡紧轮与绑带连接,从而达到了能够对货物进行绑紧固定,防止货物放置不稳发生意外的效果。
技术特征:
1.一种基于视觉识别的智能化搬运装置,其特征在于,包括有自动移动搬运车(1)、识别探头(2)、缓冲板(3)、弹性件和辅助搬运卡紧机构(5),自动移动搬运车(1)前部连接有识别探头(2),识别探头(2)能够识别前进道路,自动移动搬运车(1)中部左右两侧均连接有缓冲板(3),缓冲板(3)与自动移动搬运车(1)之间均连接有多个弹性件,自动移动搬运车(1)上设有对货物辅助搬运和卡紧固定的辅助搬运卡紧机构(5)。
2.如权利要求1所述的一种基于视觉识别的智能化搬运装置,其特征在于,辅助搬运卡紧机构(5)包括有连接件(51)、辅助搬运件(52)和固定件(53),自动移动搬运车(1)上部左右两侧均连接有多个连接件(51),同侧连接件(51)上部之间均转动式连接有辅助搬运件(52),自动移动搬运车(1)前后两部均卡接有多个固定件(53),移动固定件(53),固定件(53)与辅助搬运件(52)脱离,然后转动打开辅助搬运件(52),货物通过辅助搬运件(52)进行辅助搬运,货物搬运到自动移动搬运车(1)上之后,转动关闭辅助搬运件(52),移动固定件(53)与辅助搬运件(52)连接,对货物进行卡紧。
3.如权利要求2所述的一种基于视觉识别的智能化搬运装置,其特征在于,还包括有固定机构(6),固定机构(6)包括有滑槽座(61)、滑动件(62)、绑带(63)、转动件(64)、扭簧(65)和卡紧轮(66),自动移动搬运车(1)前后两部上侧均连接有滑槽座(61),滑槽座(61)左右两部上侧均滑动式连接有滑动件(62),左右两部的滑动件(62)之间均连接有绑带(63),滑动件(62)上均转动式连接有转动件(64),转动件(64)与滑动件(62)之间均连接有多个扭簧(65),转动件(64)上均连接有卡紧轮(66),移动滑动件(62)在滑槽座(61)上进行移动,移动至合适位置之后,转动转动件(64)带动卡紧轮(66)与绑带(63)脱离,绑带(63)对货物进行绑紧固定,固定完成之后,松开转动件(64),在扭簧(65)的作用下,转动件(64)带动卡紧轮(66)与绑带(63)连接,对绑带(63)进行固定卡紧。
4.如权利要求1所述的一种基于视觉识别的智能化搬运装置,其特征在于,自动移动搬运车(1)上连接有防护条。
5.如权利要求1所述的一种基于视觉识别的智能化搬运装置,其特征在于,弹性件为弹簧(4),缓冲板(3)与自动移动搬运车(1)之间均连接有多个弹簧(4)。
6.如权利要求3所述的一种基于视觉识别的智能化搬运装置,其特征在于,转动件(64)上连接有橡胶条。
技术总结
本技术涉及智能机器人领域,尤其涉及一种基于视觉识别的智能化搬运装置。本技术提供一种能够对货物进行辅助搬运并卡紧限位,节约人力搬运的基于视觉识别的智能化搬运装置。一种基于视觉识别的智能化搬运装置,包括有自动移动搬运车、识别探头和缓冲板等,自动移动搬运车前部连接有识别探头,自动移动搬运车中部左右两侧均连接有缓冲板。本技术通过移动固定件,固定件与辅助搬运件脱离,然后转动打开辅助搬运件,货物通过辅助搬运件搬运到自动移动搬运车上,之后转动复位辅助搬运件,移动固定件与辅助搬运件卡接,从而达到了能够对货物进行辅助搬运并卡紧限位,节约人力搬运的效果。
技术研发人员:牛丽,王芳
受保护的技术使用者:苏州市职业大学(苏州开放大学)
技术研发日:20230330
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!