五轴机器人用的自动给料压平模组的制作方法
本技术涉及五轴机器人,具体为五轴机器人用的自动给料压平模组。
背景技术:
1、基于无机非金属材料成型的五轴机器人软、硬件集成系统;样品成型后设备参数调整及配料配方研究能力,五轴机器人具备控制粉体加工硬件系统实现,粉体材料生产流程的功能,五轴机器人所需控制功能主要包括:全自动指令输入、修改与执行,加工过程控制,五轴运动系统运动控制,上料整平模式选择与参数调节,追光模式选择与俯仰旋转调节等。“开灯”代指透镜聚焦太阳光(工作状态),“关灯”代指透镜不聚焦太阳光(非工作状态),其中在上料给料的过程中,需要使用上料装置,上料装置上的压平模组进行铺粉。
2、但是,传统的压平模组存在以下缺点:
3、(1)传统的压平模组只是单一的将无机非金属粉末材料通过安装在其上的圆筒进行铺平,无法对无机非金属粉末材料施加的压力进行调节,十分不便;
4、(2)传统的压平模组压力调节方式为更换圆筒,操作繁琐,增加上料的劳动量。
技术实现思路
1、本实用新型的目的在于提供五轴机器人用的自动给料压平模组,以解决上述背景技术中提出的传统的压平模组只是单一的将无机非金属粉末材料通过安装在其上的圆筒进行铺平,无法对无机非金属粉末材料施加的压力进行调节,十分不便;传统的压平模组压力调节方式为更换圆筒,操作繁琐,增加上料的劳动量的问题。
2、为实现上述目的,本实用新型提供如下技术方案:五轴机器人用的自动给料压平模组,包括滑行架,所述滑行架的上方设有给料台,所述给料台底端的中部固定安装有料斗,所述给料台的顶端开设有与料斗相连的上料口,所述给料台底端的两侧均固定安装有上料支架,所述滑行架顶端的一侧固定安装有压平机构,所述压平机构包括压平支架、刮平电机和落料电机,所述压平支架的中部与落料电机的底端固定连接,所述压平支架的内部与刮平电机的一侧固定连接,无机非金属材料加工人员通过上料口向五轴机器人内投放无机非金属材料粉末,无机非金属材料粉末经过压平机构进行铺平。
3、优选的,所述刮平电机的输出端固定安装有圆筒,所述落料电机的输出端固定安装有带轮铺料带,刮平电机通电后启动,刮平电机带动圆筒转动,圆筒对带轮铺料带上输送的无机非金属材料粉末进行铺平,落料电机通电后启动,落料电机带动带轮铺料带发生传动,带轮铺料带上的带子与料斗上的无机非金属材料粉末接触进行输送。
4、优选的,所述压平支架的底端与滑行架固定连接,压平机构通过压平支架安装在滑行架上。
5、优选的,所述给料台的表面滑动连接有若干个链接管,若干个所述链接管的一侧均固定安装有挡板,若干个所述挡板的表面均滑动连接有固定管,无机非金属材料加工人员使用手部沿着给料台滑动链接管,对挡板的位置进行调整,挡板从上料口的四个方向进行阻挡,避免无机非金属材料粉末进料时出现迸溅溢出的现象,无机非金属材料加工人员使用手部沿着挡板滑动固定管,通过钳子等设备拧动螺钉,将固定管固定在两个挡板连接处,以此从挡板的另一侧进行固定。
6、优选的,所述给料台顶端的两侧均固定安装有安装架,两个所述安装架之间转动连接有滚筒,无机非金属材料粉末在进料前可以通过安装架上安装的滚筒进行简易压平,避免出现进料过多的现象,便于后续进行铺粉操作。
7、优选的,所述滑行架的表面滑动连接有两个活动块,两个所述活动块的顶端分别与两个上料支架的底端固定连接,无机非金属材料加工人员使用前可以沿着滑行架滑动活动块,对上料支架的位置进行调整,间接的对料斗的下料位置进行调整。
8、优选的,所述滑行架两侧的两端均固定安装有角钢,无机非金属材料加工人员可以通过角钢将滑行架安装在五轴机器人上。
9、与现有技术相比,本实用新型的有益效果是:
10、1、通过设置压平机构,落料电机带动带轮辅料带发生传动,对料斗内存储的无机非金属材料粉末上料速度进行调节,避免出现上料过多或者过少的现象。操作简单,减少上料的劳动量;
11、2、通过设置压平机构,刮平电机带动圆筒对带轮辅料带上的无机非金属材料粉末进行整平,通过对上料支架的安装位置进行调整,间接的对圆筒对无机非金属材料粉末的压力进行调整,简单便捷。
技术特征:
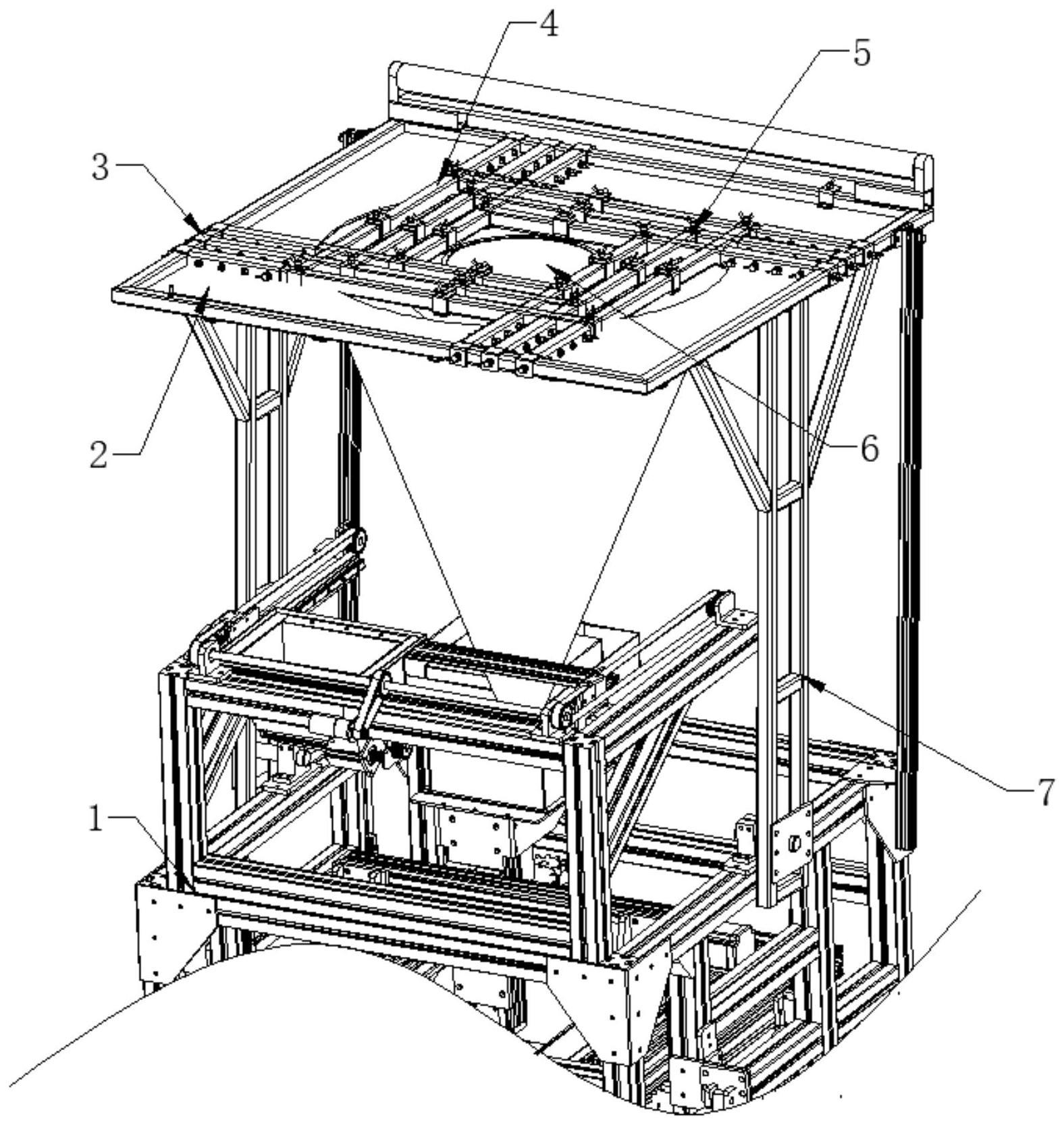
1.五轴机器人用的自动给料压平模组,包括滑行架(10),其特征在于:所述滑行架(10)的上方设有给料台(2),所述给料台(2)底端的中部固定安装有料斗(8),所述给料台(2)的顶端开设有与料斗(8)相连的上料口(6),所述给料台(2)底端的两侧均固定安装有上料支架(7),所述滑行架(10)顶端的一侧固定安装有压平机构(11),所述压平机构(11)包括压平支架(111)、刮平电机(113)和落料电机(114),所述压平支架(111)的中部与落料电机(114)的底端固定连接,所述压平支架(111)的内部与刮平电机(113)的一侧固定连接。
2.根据权利要求1所述的五轴机器人用的自动给料压平模组,其特征在于:所述刮平电机(113)的输出端固定安装有圆筒(115),所述落料电机(114)的输出端固定安装有带轮铺料带(112)。
3.根据权利要求1所述的五轴机器人用的自动给料压平模组,其特征在于:所述压平支架(111)的底端与滑行架(10)固定连接。
4.根据权利要求1所述的五轴机器人用的自动给料压平模组,其特征在于:所述给料台(2)的表面滑动连接有若干个链接管(3),若干个所述链接管(3)的一侧均固定安装有挡板(4),若干个所述挡板(4)的表面均滑动连接有固定管(5)。
5.根据权利要求1所述的五轴机器人用的自动给料压平模组,其特征在于:所述给料台(2)顶端的两侧均固定安装有安装架(12),两个所述安装架(12)之间转动连接有滚筒(13)。
6.根据权利要求1所述的五轴机器人用的自动给料压平模组,其特征在于:所述滑行架(10)的表面滑动连接有两个活动块(9),两个所述活动块(9)的顶端分别与两个上料支架(7)的底端固定连接。
7.根据权利要求1所述的五轴机器人用的自动给料压平模组,其特征在于:所述滑行架(10)两侧的两端均固定安装有角钢(1)。
技术总结
本技术公开了五轴机器人用的自动给料压平模组,包括滑行架,滑行架的上方设有给料台,给料台底端的中部固定安装有料斗,给料台的顶端开设有与料斗相连的上料口,给料台底端的两侧均固定安装有上料支架,本技术五轴机器人用的自动给料压平模组,通过设置压平机构,落料电机带动带轮辅料带发生传动,对料斗内存储的无机非金属材料粉末上料速度进行调节,避免出现上料过多或者过少的现象。操作简单,减少上料的劳动量;通过设置压平机构,刮平电机带动圆筒对带轮辅料带上的无机非金属材料粉末进行整平,通过对上料支架的安装位置进行调整,间接的对圆筒对无机非金属材料粉末的压力进行调整,简单便捷。
技术研发人员:刘伟,薛金彦
受保护的技术使用者:哈工领智产教融合(哈尔滨)科技有限公司
技术研发日:20230418
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!