用于扫地机器人的物料升降搬运装置的制作方法
本技术涉及领域,特别是涉及一种用于扫地机器人的物料升降搬运装置。
背景技术:
1、扫地机器人上用于扫地的刷子为主要损耗部件,应市场需求量大,配置有生产线用于生产价格刷子,扫地机器人刷子生产线中涉及到对刷子半成品的搬移转运,在加工工位之间转移半成品刷子时,采用托盘承载半成品刷子,通过升降装置带动托盘上下转移,实现半成品刷子的批量传输。
2、现有升降装置上下转移托盘中的刷子时,由运动状态变换为静置状态过程中会产生冲力,其引起振动容易使托盘中刷子半成品弹出,且生产线和生产不同规格的产品,生产不同规格产品时,升降装置承载的产品重量也不同,需要进行调试,装置的调试快慢直接影响生产效率。
3、因此,如何降低升降装置的调试难度,并提高升降装置缓冲能力,是本领域技术人员需要解决的问题。
技术实现思路
1、本实用新型的目的是克服现有技术中的不足之处,提供一种调试难度低,缓冲效果好的用于扫地机器人的物料升降搬运装置。
2、本实用新型的目的是通过以下技术方案来实现的:
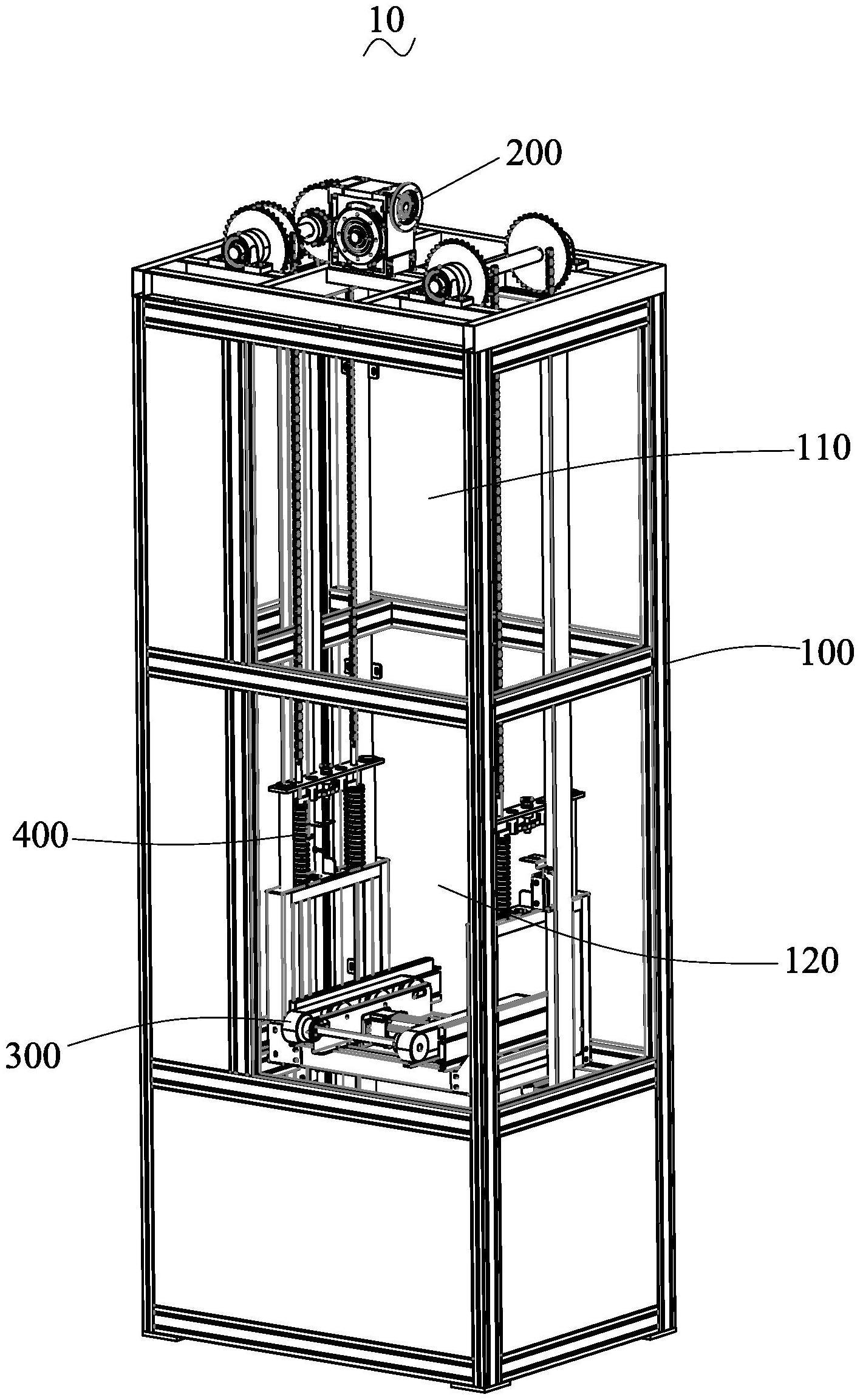
3、一种用于扫地机器人的物料升降搬运装置,包括:机架、升降驱动组件、承载模组及缓冲组件;
4、所述机架设置有上层出口及下层出口,所述承载模组位于所述机架内,所述升降驱动组件用于牵引所述承载模组于所述上层出口和所述下层出口之间往复移动;
5、所述承载模组包括传输带及支撑架,所述传输带设置于所述支撑架上;
6、所述缓冲组件包括转接板、旋钮、螺母、换向杆、限位导杆及弹簧,所述限位导杆穿设所述转接板及所述支撑架,所述限位导杆的两端均设置有阻挡环,两个所述阻挡环分别与所述转接板及所述支撑架抵持,所述旋钮可转动地设于所述转接板的中心位置处,所述螺母与所述旋钮螺合,所述转接板与所述升降驱动组件连接,所述转接板上设置有铰链座,所述换向杆可转动地设于所述铰链座上,所述换向杆的第一端与所述螺母连接,所述弹簧的两端分别与所述换向杆的第二端及所述支撑架的外壁抵持。
7、在其中一个实施例中,所述弹簧内设有随动导杆,所述随动导杆穿设所述支撑架,所述随动导杆的两端上设置有止动部,所述换向杆的第一端与所述止动部抵持。
8、在其中一个实施例中,所述升降驱动组件包括电机、链轮、链条,所述电机及所述链轮设置于所述机架的顶部,所述链条与所述链轮啮合,且所述链条的末端与所述转接板连接。
9、在其中一个实施例中,所述转接板上设置有连接杆,所述链条与所述连接杆连接。
10、在其中一个实施例中,所述螺母的外壁上设置有铰接耳,所述换向杆的第一端与所述铰接耳转动连接。
11、在其中一个实施例中,所述铰接耳上开设有腰形孔。
12、在其中一个实施例中,所述铰接耳设有两个,两个所述铰接耳以所述旋钮为中心对称分布。
13、在其中一个实施例中,还包括抗摆动模组,所述抗摆动模组包括导轨、上引导滑块及下引导块,所述导轨安装于所述机架上,且所述导轨延伸方向与所述承载模组的移动轨迹平行,所述上引导滑块及所述下引导块均可滑动地设于所述导轨上,所述上引导滑块与所述支撑架的顶部连接,所述下引导块与所述支撑架的底部连接。
14、在其中一个实施例中,所述上引导滑块包括外壳及u形弹性夹片,所述u形弹性夹片设置于所述外壳内,所述u形弹性夹片夹持所述导轨。
15、在其中一个实施例中,所述外壳内设置有两个弹性垫块,两个所述弹性垫块位于所述u形弹性夹片的两侧。
16、综上,螺母与换向杆配合为承载模组提供缓冲,使其转移物料时更加平稳,仅通过旋转旋钮可调整弹簧的预紧力,调试便捷,使承载模组在承载不同重量物料时也保证平稳运行。
技术特征:
1.一种用于扫地机器人的物料升降搬运装置,其特征在于,包括:机架、升降驱动组件、承载模组及缓冲组件;
2.根据权利要求1所述的用于扫地机器人的物料升降搬运装置,其特征在于,所述弹簧内设有随动导杆,所述随动导杆穿设所述支撑架,所述随动导杆的两端上设置有止动部,所述换向杆的第一端与所述止动部抵持。
3.根据权利要求1所述的用于扫地机器人的物料升降搬运装置,其特征在于,所述升降驱动组件包括电机、链轮、链条,所述电机及所述链轮设置于所述机架的顶部,所述链条与所述链轮啮合,且所述链条的末端与所述转接板连接。
4.根据权利要求3所述的用于扫地机器人的物料升降搬运装置,其特征在于,所述转接板上设置有连接杆,所述链条与所述连接杆连接。
5.根据权利要求1所述的用于扫地机器人的物料升降搬运装置,其特征在于,所述螺母的外壁上设置有铰接耳,所述换向杆的第一端与所述铰接耳转动连接。
6.根据权利要求5所述的用于扫地机器人的物料升降搬运装置,其特征在于,所述铰接耳上开设有腰形孔。
7.根据权利要求5所述的用于扫地机器人的物料升降搬运装置,其特征在于,所述铰接耳设有两个,两个所述铰接耳以所述旋钮为中心对称分布。
8.根据权利要求1所述的用于扫地机器人的物料升降搬运装置,其特征在于,还包括抗摆动模组,所述抗摆动模组包括导轨、上引导滑块及下引导块,所述导轨安装于所述机架上,且所述导轨延伸方向与所述承载模组的移动轨迹平行,所述上引导滑块及所述下引导块均可滑动地设于所述导轨上,所述上引导滑块与所述支撑架的顶部连接,所述下引导块与所述支撑架的底部连接。
9.根据权利要求8所述的用于扫地机器人的物料升降搬运装置,其特征在于,所述上引导滑块包括外壳及u形弹性夹片,所述u形弹性夹片设置于所述外壳内,所述u形弹性夹片夹持所述导轨。
10.根据权利要求9所述的用于扫地机器人的物料升降搬运装置,其特征在于,所述外壳内设置有两个弹性垫块,两个所述弹性垫块位于所述u形弹性夹片的两侧。
技术总结
一种用于扫地机器人的物料升降搬运装置,包括机架、升降驱动组件、承载模组及缓冲组件。机架设置有上层出口及下层出口;承载模组包括传输带及支撑架;缓冲组件包括转接板、旋钮、螺母、换向杆、限位导杆及弹簧,限位导杆穿设转接板及支撑架,限位导杆两端均设有阻挡环,旋钮可转动地设于转接板的中心位置处,螺母与旋钮螺合,转接板与升降驱动组件连接,转接板上设置有铰链座,换向杆可转动地设于铰链座上,换向杆与螺母连接,弹簧的两端与换向杆及支撑架抵持。综上,螺母与换向杆配合为承载模组提供缓冲,使其转移物料时更加平稳,仅通过旋转旋钮可调整弹簧的预紧力,调试便捷,使承载模组在承载不同重量物料时也保证平稳运行。
技术研发人员:吴存富,胡彬
受保护的技术使用者:惠州石头智造科技有限公司
技术研发日:20230420
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!