一种用于双室袋的灌装加塞机的制作方法
本申请涉及医疗器械,特别涉及一种用于双室袋的灌装加塞机。
背景技术:
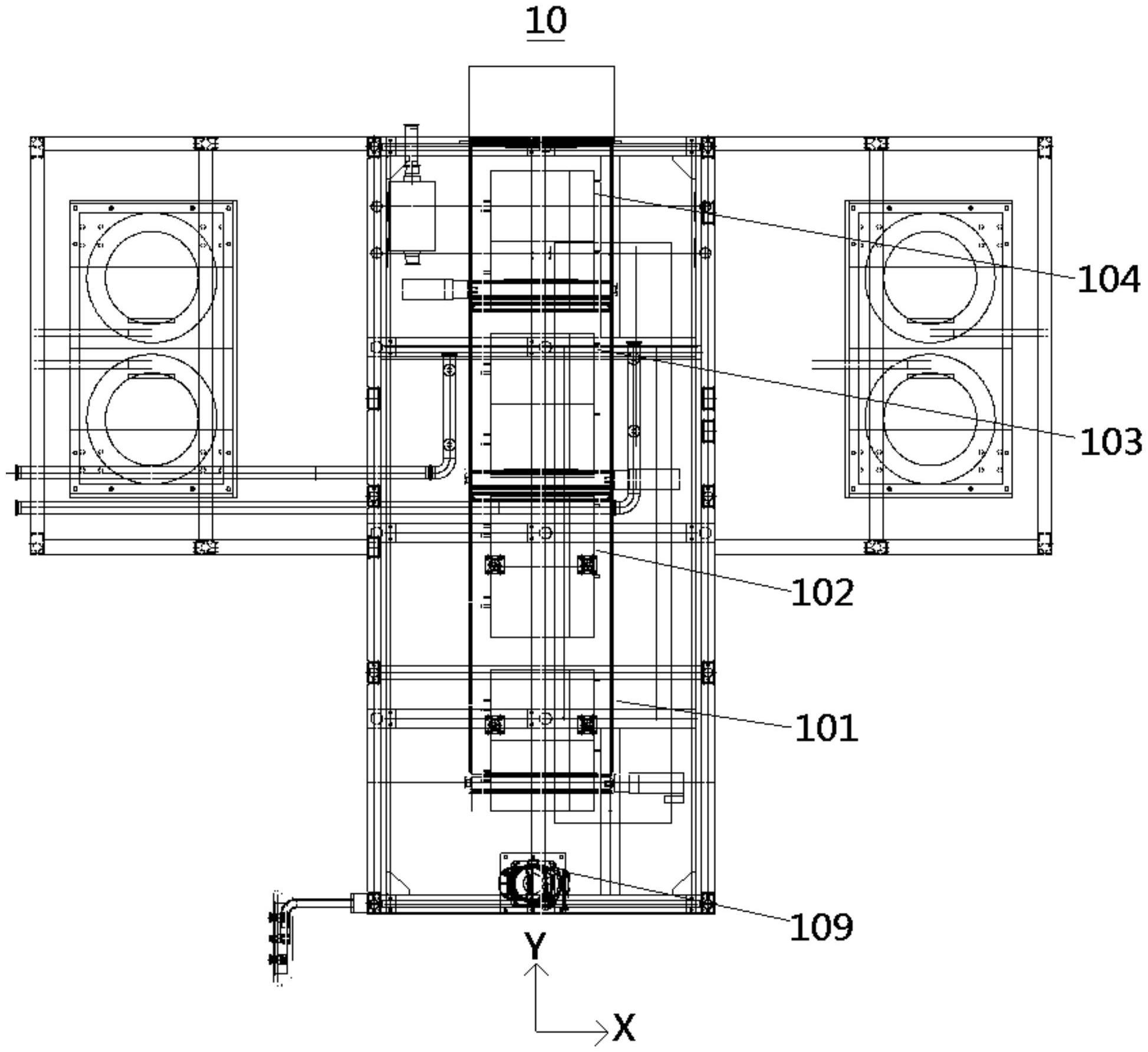
1、目前,常规的灌装加塞机为单侧灌装。请参阅图1,操作人员在上袋工位101将软袋放在指定工装上,设备将软袋移送至灌装工位1031和加塞工位1032进行灌装、加塞工序,加塞完成后灌装工位上的夹具打开,软袋由下袋工位104转移到输送带上。然而,现有的灌装加塞机的结构很难完成两侧都有软管的双室袋的灌装加塞。具体地,现有的灌装加塞机使用灌封环形传送,来驱动软袋依次经过转移(袋接收)、灌装、加塞、输出等工位,进行各工位的对软袋的加工,灌封环形传送一圈有多组夹具,常规的有9组夹具,有的设备甚至能到17组之多,夹具调整难度很大,同时还要考虑每组夹具的重复定位精度,设备调试和设备维护的工作量和难度非常大。
2、因此,如何避免现有灌装加塞机无法完成两侧都有软管的双室袋的灌装加塞,是本领域技术人员目前需要解决的技术问题。
技术实现思路
1、本申请的目的是提供一种用于双室袋的灌装加塞机,能够实现双室袋的灌装与加塞,从而解决现有灌装加塞机无法完成两侧都有软管的双室袋的灌装加塞问题。
2、为实现上述目的,本申请提供一种用于双室袋的灌装加塞机,包括上袋工位、转移工位、灌装加塞工位和下袋工位,还包括:
3、双侧定位轴,设于所述上袋工位,用于分别插入固定于所述上袋工位上的所述双室袋的双侧软管中,以实现将双侧的所述软管翻转预设角度并将所述双室袋移送至所述转移工位;
4、双侧灌装嘴,设于所述灌装加塞工位的灌装工位,用于分别插入所述灌装工位的所述双室袋的双侧的所述软管中,以实现灌装;
5、双侧加塞件,设于所述灌装加塞工位的加塞工位,用于将塞子分别插入所述加塞工位的所述双室袋的双侧的所述软管中,以实现加塞;
6、转移夹手机构,用于将所述双室袋从所述转移工位移送至所述灌装加塞工位,且用于将完成灌装和加塞后的所述双室袋从所述灌装加塞工位移送至所述下袋工位,所述转移夹手机构包括双侧夹手,双侧的所述夹手用于分别夹持翻转预设角度后的双侧的所述软管。
7、在一些实施例中,还包括上袋机器人,所述上袋机器人用于将所述双室袋移送至所述上袋工位,以实现上袋;所述上袋机器人设有双侧固定夹具,双侧的所述固定夹具用于分别固定双侧的所述软管,以供双侧的所述定位轴分别插入双侧的所述软管。
8、在一些实施例中,还包括双侧第一驱动组件,双侧的所述第一驱动组件设于所述上袋工位,双侧的所述第一驱动组件分别连接双侧的所述定位轴,双侧的所述第一驱动组件用于分别驱动双侧的所述定位轴沿第一方向运动,以分别插入双侧的所述软管中。
9、在一些实施例中,还包括双侧第二驱动组件,双侧的所述第二驱动组件设于所述上袋工位,双侧的所述第二驱动组件分别连接双侧的所述第一驱动组件,双侧的所述第二驱动组件用于分别驱动双侧的所述第一驱动组件及双侧的所述定位轴绕第二方向的轴线翻转,以分别使双侧的所述软管向上翻转预设角度。
10、在一些实施例中,所述转移夹手机构还包括双侧夹手开闭组件,双侧的所述夹手开闭组件分别连接双侧的所述夹手,双侧的所述夹手开闭组件用于分别驱动双侧的所述夹手打开和闭合。
11、在一些实施例中,所述转移夹手机构还包括转移驱动组件,所述转移驱动组件用于驱动双侧的所述夹手沿第二方向运动,以实现所述双室袋在所述转移工位、所述灌装加塞工位和所述下袋工位之间移送。
12、在一些实施例中,所述转移夹手机构还包括支撑座和双侧支撑板,双侧的所述夹手分别安装于双侧的所述支撑板上,双侧的所述支撑板与所述支撑座之间均设有导向机构,所述转移驱动组件连接双侧的所述支撑板,以驱动双侧的所述支撑板沿对应的所述导向机构运动。
13、在一些实施例中,所述转移夹手机构还包括双侧夹手伸缩组件,双侧的所述夹手伸缩组件分别连接双侧的所述夹手,双侧的所述夹手伸缩组件用于分别驱动双侧的所述夹手伸缩运动,以使双侧的所述夹手分别避让双侧的所述软管。
14、在一些实施例中,还包括充氮机构,所述充氮机构用于对灌装期间的所述双室袋进行充氮,且用于对所述塞子进行充氮。
15、在一些实施例中,还包括支座,所述上袋工位、所述转移工位、所述灌装加塞工位和所述下袋工位沿第二方向依次设置于所述支座上。
16、本申请实施例提供的用于双室袋的灌装加塞机的工作过程为:将双室袋上料至上袋工位,通过双侧定位轴分别插入固定于上袋工位上的双室袋的双侧软管中,将双室袋上的双侧软管翻转预设角度,并将翻转预设角度后的双室袋移送至转移工位,转移夹手机构的双侧夹手分别夹持翻转预设角度后的双侧软管,并撤离双侧定位轴,转移夹手机构将双室袋移送至灌装加塞工位,在双室袋移送至灌装加塞工位的灌装工位后,双侧灌装嘴分别插入双侧软管,以实现对双室袋灌装,灌装完成后,再将双室袋移送至灌装加塞工位的加塞工位,通过双侧加塞件将塞子分别插入双侧软管,以实现对双室袋加塞,加塞完成后,转移夹手机构将双室袋移送至下袋工位。
17、上述用于双室袋的灌装加塞机能够实现袋型两侧都有软管的双室袋的灌装和加塞,并且保留了斜躺灌装的两项优点:避免滴液和减少软管焊接处的损伤;同时,将传统灌装工位和加塞工位整合成灌装加塞工位,这样一来,整个灌装加塞机的结构得到了简化,不仅精简了设备的工位布置,还缩短了设备的整体长度。此外,相较于传统灌装加塞机,本申请实施例提供的灌装加塞机不再设置灌封环形传送,而是使用驱动单元(即转移夹手机构)驱动四组灌封夹具在灌装加塞工位和下袋工位之间往复运动,同时还减少了灌封夹具的组数,降低了灌封夹具组装调试和维护调试的难度,并且提高了整机的运行速度,减少了循环时间,从而提高了工作效率。
技术特征:
1.一种用于双室袋的灌装加塞机,其特征在于,包括上袋工位、转移工位、灌装加塞工位和下袋工位,还包括:
2.如权利要求1所述的用于双室袋的灌装加塞机,其特征在于,还包括上袋机器人,所述上袋机器人用于将所述双室袋移送至所述上袋工位,以实现上袋;所述上袋机器人设有双侧固定夹具,双侧的所述固定夹具用于分别固定双侧的所述软管,以供双侧的所述定位轴分别插入双侧的所述软管。
3.如权利要求1所述的用于双室袋的灌装加塞机,其特征在于,还包括双侧第一驱动组件,双侧的所述第一驱动组件设于所述上袋工位,双侧的所述第一驱动组件分别连接双侧的所述定位轴,双侧的所述第一驱动组件用于分别驱动双侧的所述定位轴沿第一方向运动,以分别插入双侧的所述软管中。
4.如权利要求3所述的用于双室袋的灌装加塞机,其特征在于,还包括双侧第二驱动组件,双侧的所述第二驱动组件设于所述上袋工位,双侧的所述第二驱动组件分别连接双侧的所述第一驱动组件,双侧的所述第二驱动组件用于分别驱动双侧的所述第一驱动组件及双侧的所述定位轴绕第二方向的轴线翻转,以分别使双侧的所述软管向上翻转预设角度。
5.如权利要求1所述的用于双室袋的灌装加塞机,其特征在于,所述转移夹手机构还包括双侧夹手开闭组件,双侧的所述夹手开闭组件分别连接双侧的所述夹手,双侧的所述夹手开闭组件用于分别驱动双侧的所述夹手打开和闭合。
6.如权利要求1所述的用于双室袋的灌装加塞机,其特征在于,所述转移夹手机构还包括转移驱动组件,所述转移驱动组件用于驱动双侧的所述夹手沿第二方向运动,以实现所述双室袋在所述转移工位、所述灌装加塞工位和所述下袋工位之间移送。
7.如权利要求6所述的用于双室袋的灌装加塞机,其特征在于,所述转移夹手机构还包括支撑座和双侧支撑板,双侧的所述夹手分别安装于双侧的所述支撑板上,双侧的所述支撑板与所述支撑座之间均设有导向机构,所述转移驱动组件连接双侧的所述支撑板,以驱动双侧的所述支撑板沿对应的所述导向机构运动。
8.如权利要求1所述的用于双室袋的灌装加塞机,其特征在于,所述转移夹手机构还包括双侧夹手伸缩组件,双侧的所述夹手伸缩组件分别连接双侧的所述夹手,双侧的所述夹手伸缩组件用于分别驱动双侧的所述夹手伸缩运动,以使双侧的所述夹手分别避让双侧的所述软管。
9.如权利要求1-8任意一项所述的用于双室袋的灌装加塞机,其特征在于,还包括充氮机构,所述充氮机构用于对灌装期间的所述双室袋进行充氮,且用于对所述塞子进行充氮。
10.如权利要求1-8任意一项所述的用于双室袋的灌装加塞机,其特征在于,还包括支座,所述上袋工位、所述转移工位、所述灌装加塞工位和所述下袋工位沿第二方向依次设置于所述支座上。
技术总结
本申请公开了一种用于双室袋的灌装加塞机,包括上袋工位、转移工位、灌装加塞工位、下袋工位、双侧定位轴、双侧灌装嘴、双侧加塞件和转移夹手机构。其中,双侧的定位轴用于分别插入双室袋的双侧软管中,双侧的灌装嘴用于实现灌装,双侧的加塞件用于实现加塞,转移夹手机构用于将双室袋从转移工位移送至灌装加塞工位,且用于将完成灌装和加塞后的双室袋从灌装加塞工位移送至下袋工位。上述用于双室袋的灌装加塞机能够实现袋型两侧都有软管的双室袋的灌装和加塞,整个灌装加塞机的结构得到了简化,降低了灌封夹具组装调试和维护调试的难度,并且提高了整机的运行速度,提高了工作效率。
技术研发人员:张礼存,李松,李学习,付延超,王振明,王术徽
受保护的技术使用者:山东新华医疗器械股份有限公司
技术研发日:20230424
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!