一种高效机器人自动装箱机的制作方法
本技术涉及装箱机,具体为一种高效机器人自动装箱机。
背景技术:
1、装箱机是一种将无包装的产品或者小包装的产品半自动或者自动装入运输包装的一种设备,其工作原理是将产品按一定排列方式和定量装入箱中(瓦楞纸箱、塑料箱、托盘),并把箱的开口部分闭合或封牢。按照装箱机的要求,它应具有纸箱成形(或打开纸箱)、计量、装箱的功能,有些还配有封口或者捆扎功能。
2、现有的装箱机需要人工进行调整箱体的高度以及位置,劳动力度大,且人工成本高,同时装箱的效率低,自动化程度低,同时在人工进行操作时还会出现意外的现象发生,降低安全性。针对相关技术问题,尚未提出解决方案。
技术实现思路
1、针对相关技术中的问题,本实用新型提出一种高效机器人自动装箱机,以克服现有相关技术所存在的上述技术问题,本实用新型的目的是实现自动化对包装物的位置进行调整,提高装箱的工作效率和质量,解决传统的通过人工进行操作,劳动力度大的问题,自动化程度高。
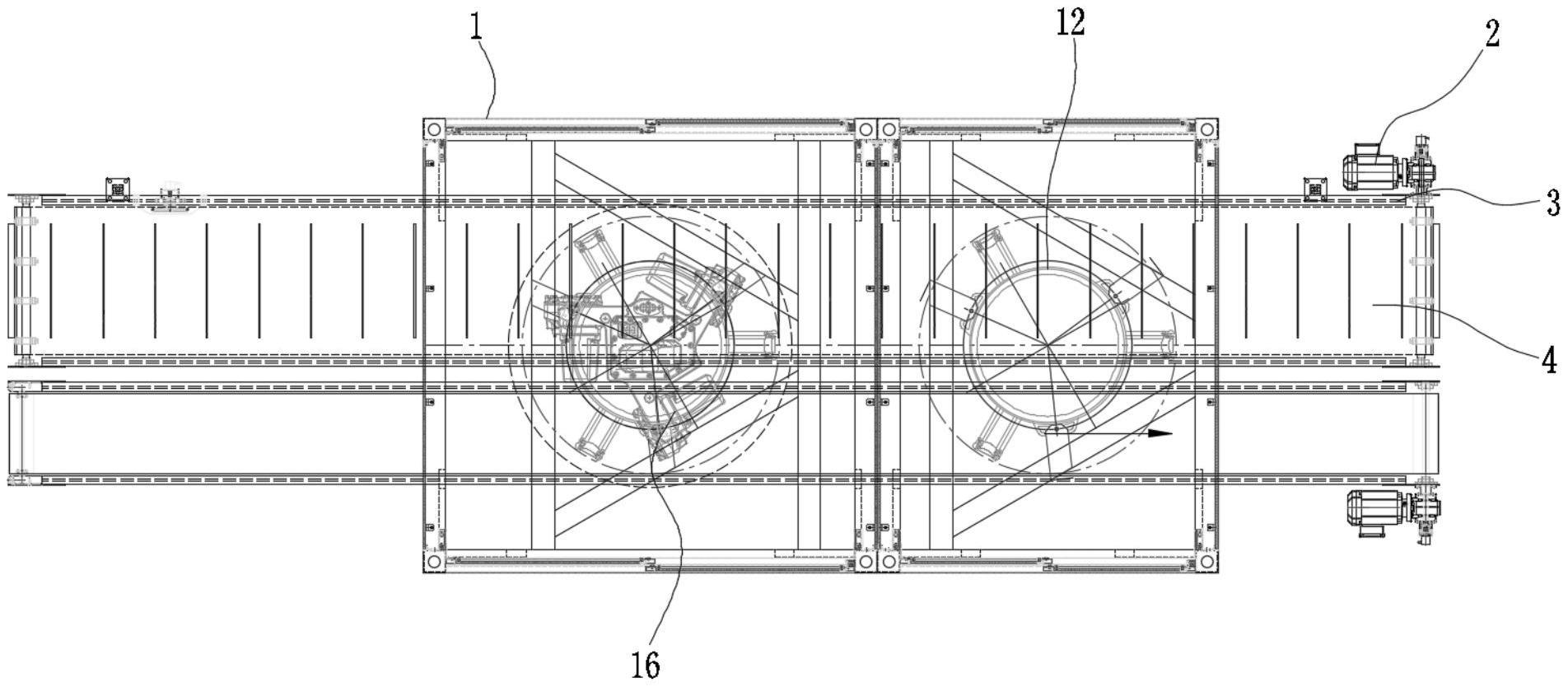
2、为实现上述目的,本实用新型提供如下技术方案:一种高效机器人自动装箱机,包括支撑架和机器人,所述支撑架的下方设置有输送机构,所述输送机构的底部两端均设置有升降机构,所述支撑架上设置有夹取机构,所述夹取机构包括气缸、安装座、夹块、移动柱和调节柱,所述安装座安装在支撑架上,所述移动柱设置有三个,且呈三角形等距设置,所述移动柱的一端与安装座活动连接,所述移动柱的另一端与调节柱的一端活动连接,所述气缸安装在安装座上,所述夹块安装在调节柱的另一端,所述气缸的输出端与调节柱连接,所述机器人设置在支撑架的一侧。
3、优选的,所述输送机构包括驱动电机、支架、传送带、转动轴和皮带轮,所述驱动电机安装在支架上,所述转动轴设置有两个,且分别位于支架的两端,一个所述转动轴的两端分别与支架活动连接,另一个所述转动轴的两端分别与支架和驱动电机连接,所述皮带轮固定套设在转动轴上,两个所述皮带轮通过传送带连接。
4、优选的,所述升降机构包括移动杆一、移动杆二、连接板一、连接板二和连杆,所述连接板一与支架固定连接,所述移动杆一和移动杆二均设置在连接板一和连接板二之间,所述连杆安装在连接板一上,所述移动杆一的两端分别与连接板一和连接板二活动连接,所述移动杆二的一端与连接板二活动连接,所述连杆的外表面设置有外螺纹,所述移动杆二的另一端套设在连杆上,并与连杆螺纹配合。
5、优选的,所述支架上设置有水平尺。
6、优选的,所述连杆的一端固定连接有转动把手。
7、与现有技术相比,本实用新型的有益效果是:
8、(1)本实用新型为一种高效机器人自动装箱机,通过设置输送机构对包装物进行输送,启动驱动电机可带动一个转动轴进行转动,由于两个转动轴上均设置有皮带轮,且两个皮带轮通过传送带连接,实现了传送带在转动时可包装物进行输送,解决传统的通过人工进行操作,劳动力度大的问题,安全性高;
9、(2)本实用新型为一种高效机器人自动装箱机,通过设置通过升降机构可对包装物的高度进行调节,通过转动连杆,使其在转动时,连杆和移动杆二6螺纹配合,从而实现移动杆二进行移动,实现调节支架的高度,满足不同的需求;
10、(3)本实用新型为一种高效机器人自动装箱机,通过设置夹取机构,启动气缸可带动调节柱进行移动,调节柱在移动时可带动移动柱进行移动,实现了夹块对包装物进行夹取,实现自动化对包装物的位置进行调整,提高装箱的工作效率和质量。
技术特征:
1.一种高效机器人自动装箱机,其特征在于,包括支撑架(1)和机器人(16),所述支撑架(1)的下方设置有输送机构,所述输送机构的底部两端均设置有升降机构,所述支撑架(1)上设置有夹取机构,所述夹取机构包括气缸(11)、安装座(12)、夹块(13)、移动柱(14)和调节柱(15),所述安装座(12)安装在支撑架(1)上,所述移动柱(14)设置有三个,且呈三角形等距设置,所述移动柱(14)的一端与安装座(12)活动连接,所述移动柱(14)的另一端与调节柱(15)的一端活动连接,所述气缸(11)安装在安装座(12)上,所述夹块(13)安装在调节柱(15)的另一端,所述气缸(11)的输出端与调节柱(15)连接,所述机器人(16)设置在支撑架(1)的一侧。
2.根据权利要求1所述的一种高效机器人自动装箱机,其特征在于,所述输送机构包括驱动电机(2)、支架(3)、传送带(4)、转动轴和皮带轮,所述驱动电机(2)安装在支架(3)上,所述转动轴设置有两个,且分别位于支架(3)的两端,一个所述转动轴的两端分别与支架(3)活动连接,另一个所述转动轴的两端分别与支架(3)和驱动电机(2)连接,所述皮带轮固定套设在转动轴上,两个所述皮带轮通过传送带(4)连接。
3.根据权利要求2所述的一种高效机器人自动装箱机,其特征在于,所述升降机构包括移动杆一(5)、移动杆二(6)、连接板一(7)、连接板二(8)和连杆(9),所述连接板一(7)与支架(3)固定连接,所述移动杆一(5)和移动杆二(6)均设置在连接板一(7)和连接板二(8)之间,所述连杆(9)安装在连接板一(7)上,所述移动杆一(5)的两端分别与连接板一(7)和连接板二(8)活动连接,所述移动杆二(6)的一端与连接板二(8)活动连接,所述连杆(9)的外表面设置有外螺纹,所述移动杆二(6)的另一端套设在连杆(9)上,并与连杆(9)螺纹配合。
4.根据权利要求2所述的一种高效机器人自动装箱机,其特征在于,所述支架(3)上设置有水平尺(10)。
5.根据权利要求3所述的一种高效机器人自动装箱机,其特征在于,所述连杆(9)的一端固定连接有转动把手。
技术总结
本技术属于装箱机技术领域,公开了一种高效机器人自动装箱机,包括支撑架和机器人,所述支撑架的下方设置有输送机构,所述输送机构的底部两端均设置有升降机构,所述支撑架上设置有夹取机构,所述夹取机构包括气缸、安装座、夹块、移动柱和调节柱,所述输送机构包括驱动电机、支架、传送带、转动轴和皮带轮,所述升降机构包括移动杆一、移动杆二、连接板一、连接板二和连杆。本技术结构新颖,实现自动化对包装物的位置进行调整,提高装箱的工作效率和质量,解决传统的通过人工进行操作,劳动力度大的问题,自动化程度高。
技术研发人员:李鹏飞
受保护的技术使用者:合肥千带智能科技有限公司
技术研发日:20230505
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!