一种集装袋机器人套袋装置的制作方法
本技术涉及集装袋,尤其涉及一种集装袋机器人套袋装置。
背景技术:
1、集装袋又称柔性集装袋、吨装袋、太空袋等,是集装单元器具的一种,配以起重机或叉车,就可以实现集装单元化运输,它适用于装运大宗散状粉粒状物料。
2、制袋厂通过人工将若干袋子按特定叠法叠放成垛,由液压设备将成垛袋子压实并在外部套上袋子进行包装,起到对集装袋的包装操作,该操作程序一般依靠集装袋装袋机器人完成,借助机器人实现包装袋袋口的打开处理,随后手动装入呈垛的集装袋,其存在自动化不足的缺点,呈垛的集装袋较重需耗费较多的人力等。
技术实现思路
1、本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种集装袋机器人套袋装置。
2、为了实现上述目的,本实用新型采用了如下技术方案:
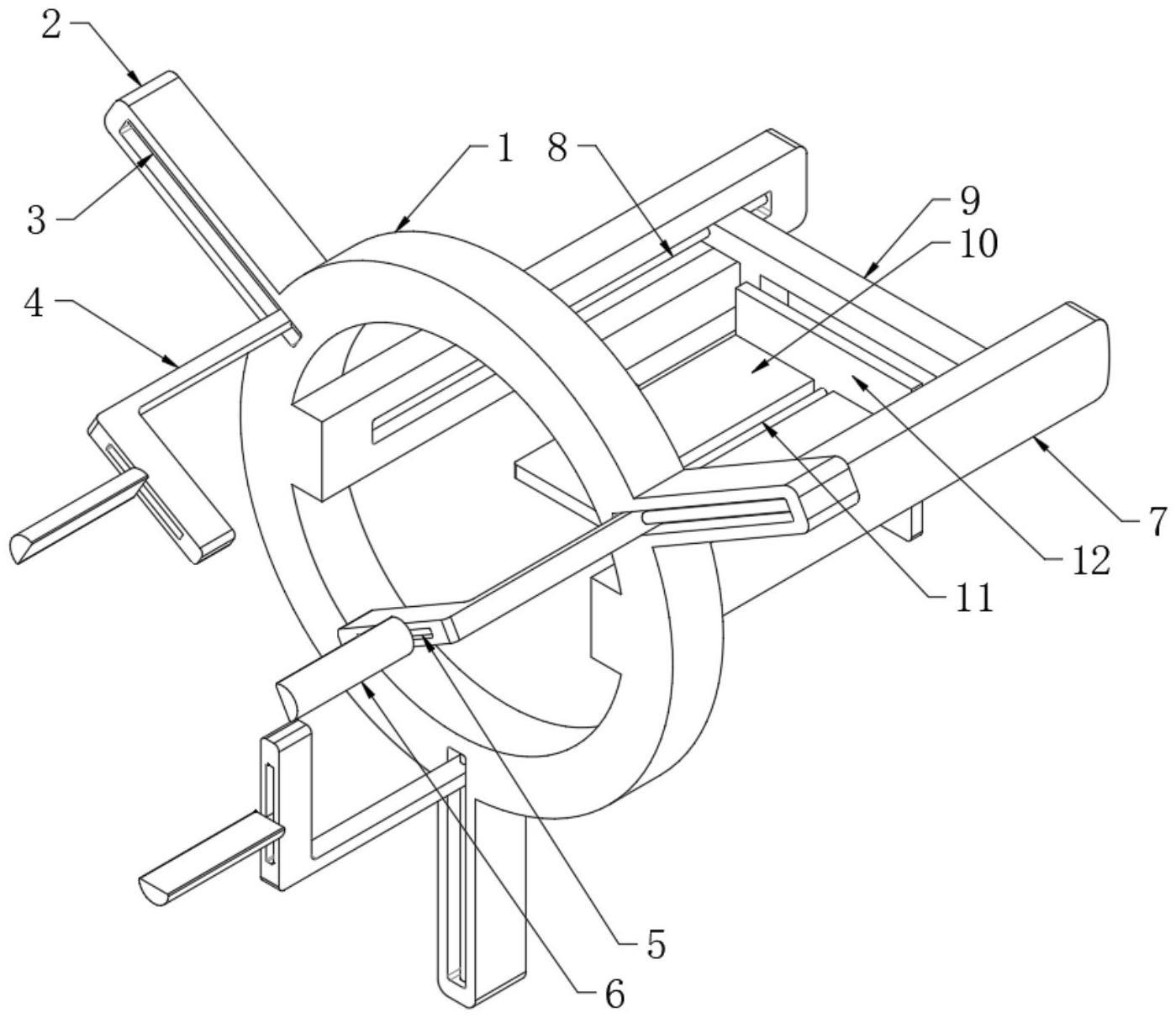
3、一种集装袋机器人套袋装置,包括圆环,所述圆环外壁上固定设有多根延伸板,多根所述延伸板侧壁均设有第一凹槽,所述第一凹槽内转动设有调节螺杆,所述调节螺杆外壁通过第一限位机构螺纹套设有第一螺母,所述第一螺母外壁固定设有活动杆,所述活动杆外壁上设有第二凹槽,所述第二凹槽内固定设有滑杆,所述滑杆外壁通过弹性机构滑动套设有滑套,所述滑套外壁固定设有开口板,所述圆环上固定设有两根支撑板,两根所述支撑板外壁均设有第三凹槽,其中一个所述第三凹槽内转动设有移动螺杆,所述移动螺杆外壁螺纹套设有移动架,另外一个所述第三凹槽内设有与移动架对应的稳定机构,所述移动架底部连接有堆放板,所述堆放板上设有条形口,所述条形口内转动设有推动螺杆,所述推动螺杆外壁通过第二限位机构螺纹套设有推动螺母,所述推动螺母外壁固定设有推板。
4、优选地,所述第一限位机构包括设置在第一凹槽内的第一限位杆,所述第一限位杆滑动贯穿第一螺母。
5、优选地,所述弹性机构包括套设在滑杆外部的弹簧,所述弹簧两端分别与滑套外壁以及第二凹槽内壁弹性连接。
6、优选地,所述稳定机构包括设置在另外一个第三凹槽内的稳定杆,所述稳定杆滑动贯穿移动架。
7、优选地,所述第二限位机构包括设置在条形口内的第二限位杆,所述第二限位杆滑动贯穿推动螺母。
8、优选地,所述活动杆呈l形,所述开口板外壁凸起呈弧形且表面光滑设置。
9、本实用新型的有益效果:
10、1、通过设置支撑板、移动螺杆与堆放板等组件,该装置借助开口板实现包装袋袋口的打开,借助堆放板实现成垛集装袋的运送处理,降低人工接入率,提高装置自动化程度。
11、2、通过设置推动螺杆与推板等组件,处于堆放板上的呈垛的集装袋还能借助推板移动推送至包装袋中,再度提高装置自动化程度。
技术特征:
1.一种集装袋机器人套袋装置,包括圆环(1),其特征在于,所述圆环(1)外壁上固定设有多根延伸板(2),多根所述延伸板(2)侧壁均设有第一凹槽,所述第一凹槽内转动设有调节螺杆(3),所述调节螺杆(3)外壁通过第一限位机构螺纹套设有第一螺母,所述第一螺母外壁固定设有活动杆(4),所述活动杆(4)外壁上设有第二凹槽,所述第二凹槽内固定设有滑杆(5),所述滑杆(5)外壁通过弹性机构滑动套设有滑套(14),所述滑套(14)外壁固定设有开口板(6),所述圆环(1)上固定设有两根支撑板(7),两根所述支撑板(7)外壁均设有第三凹槽,其中一个所述第三凹槽内转动设有移动螺杆(8),所述移动螺杆(8)外壁螺纹套设有移动架(9),另外一个所述第三凹槽内设有与移动架(9)对应的稳定机构,所述移动架(9)底部连接有堆放板(10),所述堆放板(10)上设有条形口,所述条形口内转动设有推动螺杆(11),所述推动螺杆(11)外壁通过第二限位机构螺纹套设有推动螺母,所述推动螺母外壁固定设有推板(12)。
2.根据权利要求1所述的一种集装袋机器人套袋装置,其特征在于,所述第一限位机构包括设置在第一凹槽内的第一限位杆,所述第一限位杆滑动贯穿第一螺母。
3.根据权利要求2所述的一种集装袋机器人套袋装置,其特征在于,所述弹性机构包括套设在滑杆(5)外部的弹簧(15),所述弹簧(15)两端分别与滑套(14)外壁以及第二凹槽内壁弹性连接。
4.根据权利要求3所述的一种集装袋机器人套袋装置,其特征在于,所述稳定机构包括设置在另外一个第三凹槽内的稳定杆(13),所述稳定杆(13)滑动贯穿移动架(9)。
5.根据权利要求4所述的一种集装袋机器人套袋装置,其特征在于,所述第二限位机构包括设置在条形口内的第二限位杆,所述第二限位杆滑动贯穿推动螺母。
6.根据权利要求5所述的一种集装袋机器人套袋装置,其特征在于,所述活动杆(4)呈l形,所述开口板(6)外壁凸起呈弧形且表面光滑设置。
技术总结
本技术公开了一种集装袋机器人套袋装置,包括圆环,所述圆环外壁上固定设有多根延伸板,多根所述延伸板侧壁均设有第一凹槽,所述第一凹槽内转动设有调节螺杆,所述调节螺杆外壁通过第一限位机构螺纹套设有第一螺母,所述第一螺母外壁固定设有活动杆,所述活动杆外壁上设有第二凹槽,所述第二凹槽内固定设有滑杆,所述滑杆外壁通过弹性机构滑动套设有滑套,所述滑套外壁固定设有开口板,所述圆环上固定设有两根支撑板。本技术通过设置支撑板、移动螺杆与堆放板等组件,该装置借助开口板实现包装袋袋口的打开,借助堆放板实现成垛集装袋的运送处理,降低人工接入率,提高装置自动化程度。
技术研发人员:栾英洲,韩开营
受保护的技术使用者:烟台圣元自动化设备有限公司
技术研发日:20230506
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!