一种AGV车的制作方法
本技术涉及及物流自动化,具体为一种agv车。
背景技术:
1、agv又名无人搬运车,自动导航车,激光导航车,其显著特点的是无人驾驶,agv上装备有自动导向系统,可以保障系统在不需要人工引航的情况下就能够沿预定的路线自动行驶,将货物或物料自动从起始点运送到目的地,agv的另一个特点是柔性好,自动化程度高和智能化水平高,agv的行驶路径可以根据仓储货位要求、生产工艺流程等改变而灵活改变,并且运行路径改变的费用与传统的输送带和刚性的传送线相比非常低廉,agv一般配备有装卸机构,可以与其他物流设备自动接口,实现货物和物料装卸与搬运全过程自动化。
2、但是,在实际应用中,我们发现现有技术中的agv车在同时实现旋转和升降功能时,由旋转导致震动的原因会导致agv不平稳,稳定性差,这限制了其应用范围和效率。
技术实现思路
1、针对现有技术的不足,本实用新型提供了一种agv车,解决了现有装置稳定性差的问题。
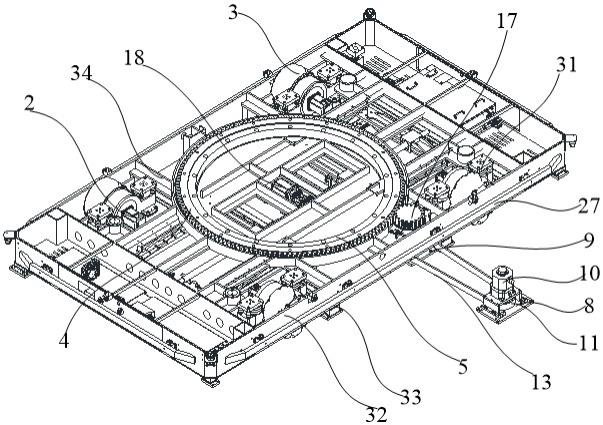
2、为实现以上目的,本实用新型通过以下技术方案予以实现:一种agv车,包括:底板,所述底板上设有第一电机,所述第一电机驱动端连接有万向轮,所述底板中央设有上升机构,所述上升机构固定连接有固定架,所述固定架四周连接有围板,所述上升机构上设有旋转机构,所述旋转机构位于车身的中央部位,所述旋转机构包括大齿轮,所述大齿轮转动连接有内轮,所述内轮固定在上升机构上,所述大齿轮顶部固定连接有顶板,所述底板底部设有第一固定板,所述第一固定板上方设有第二固定板,所述第一固定板与所述第二固定板均固定于地表,所述第一固定板上固定安装有第二电机,所述第二电机驱动端设有第一转轮,所述第二固定板上活动连接有第二转轮,所述第一转轮与所述第二转轮之间套设有皮带,所述第二转轮上固定连接有限位柱,所述限位柱内有凹槽,所述围板其中一侧固定安装有连接架,所述连接架上固定连接有外环,所述外环上端活动连接有小齿轮,所述外环下端设有限位块,所述小齿轮与所述大齿轮相啮合,所述限位块可嵌入所述凹槽内。
3、优选的,所述上升机构包括第三电机,所述第三电机固定于所述底板中央,所述底板上设有底座,所述底座上设有固定座和检测传感器,所述第三电机两端分别连接有传动轴,所述传动轴贯穿于所述固定座与所述第三电机之间,所述传动轴上套设有滑动机构,所述滑动机构上端滑动连接有支撑板,所述支撑板上与所述内轮相连接,所述底板和所述支撑板之间设有导向柱,所述导向柱套设有导向套,所述支撑板与所述固定架相连接,所述支撑板与所述内轮固定连接,所述滑动机构通过与所述支撑板导向面配合并沿导向面方向做相对位移,用于举升工件,所述滑动机构下端固定安装有滑块,所述滑块滑动连接有导轨,所述导轨安装于所述底板上。
4、优选的,还包括联轴器与调节装置,所述调节装置与所述滑动机构相连接,所述第三电机的输出端与所述联轴器活动连接,所述联轴器与所述调节装置均套设在所述传动轴上,所述第三电机的旋转运动通过所述联轴器将传到所述传动轴上,所述调节装置将旋转运动调整为直线运动。
5、优选的,所述调节装置可以是滚珠螺母。
6、优选的,所述支撑板表面上设置有防滑层。
7、优选的,所述围板四周设有指示灯。
8、优选的,所述围板四周设有激光导航传感器和激光避障传感器。
9、优选的,所述万向轮两侧设有减震装置,所述万向轮的数量为4个。
10、优选的,所述围板下方设有垫块。
11、优选的,所述限位柱上设有位置传感器。
12、有益效果
13、本实用新型提供一种agv车,具备以下有益效果:本实用新型结构简单,通过在底板上设置上升机构,上升机构通过调节装置使传动轴将旋转运动调整为直线运动,并使滑动机构通过滑块在导轨上前后进行移动从而实现顶板的升降功能,上升机构上方连接着旋转机构,首先先通过限位柱上的位置传感器感应到限位块,其次将限位块嵌入限位柱的凹槽内,通过第二电机提供的驱动力,使第一转轮带动第二转轮转动从而带动小齿轮进行转动进而使大齿轮进行同步转动,同时使顶板进行旋转,该agv车旋转和升降功能可随意切换,保持该装置的稳定性,有效的提高了生产效率和灵活性,通过设置指示灯和激光避障传感器,提高了使用上的安全性,防止工作人员工作时发生碰撞,也避免了意外的发生,通过减震装置使agv车行驶过程中状态保持平稳。
技术特征:
1.一种agv车,其特征在于,包括:底板(1),所述底板(1)上设有第一电机(2),所述第一电机(2)驱动端连接有万向轮(3),所述底板(1)中央设有上升机构,所述上升机构固定连接有固定架(15),所述固定架(15)四周连接有围板(32),所述上升机构上设有旋转机构,所述旋转机构位于车身的中央部位,所述旋转机构包括大齿轮(4),所述大齿轮(4)转动连接有内轮(5),所述内轮(5)固定在上升机构上,所述大齿轮(4)顶部固定连接有顶板(7),所述底板(1)底部设有第一固定板(8),所述第一固定板(8)上方设有第二固定板(9),所述第一固定板(8)与所述第二固定板(9)均固定于地表,所述第一固定板(8)上固定安装有第二电机(10),所述第二电机(10)驱动端设有第一转轮(11),所述第二固定板(9)上活动连接有第二转轮(12),所述第一转轮(11)与所述第二转轮(12)之间套设有皮带(13),所述第二转轮(12)上固定连接有限位柱(14),所述限位柱(14)内有凹槽,所述围板(32)其中一侧固定安装有连接架(6),所述连接架(6)上固定连接有外环(36),所述外环(36)上端活动连接有小齿轮(17),所述外环(36)下端设有限位块(16),所述小齿轮(17)与所述大齿轮(4)相啮合,所述限位块(16)可嵌入所述凹槽内。
2.根据权利要求1所述的一种agv车,其特征在于,所述上升机构包括第三电机(18),所述第三电机(18)固定于所述底板(1)中央,所述底板(1)上设有底座(26),所述底座(26)上设有检测传感器(37),所述第三电机(18)两端分别连接有传动轴(19),所述传动轴(19)贯穿于所述底座(26)与所述第三电机(18)之间,所述传动轴(19)上套设有滑动机构(20),所述滑动机构(20)上端滑动连接有支撑板(21),所述支撑板(21)上与所述内轮(5)相连接,所述底板(1)和所述支撑板(21)之间设有导向柱(34),所述导向柱(34)套设有导向套(35),所述支撑板(21)与所述固定架(15)相连接,所述支撑板(21)与所述内轮(5)固定连接,所述滑动机构(20)通过与所述支撑板(21)导向面配合并沿导向面方向做相对位移,用于举升工件,所述滑动机构(20)下端固定安装有滑块(22),所述滑块(22)滑动连接有导轨(23),所述导轨(23)安装于所述底板(1)上。
3.根据权利要求2所述的一种agv车,其特征在于,还包括联轴器(24)与调节装置(25),所述调节装置(25)与所述滑动机构(20)相连接,所述第三电机(18)的输出端与所述联轴器(24)活动连接,所述联轴器(24)与所述调节装置(25)均套设在所述传动轴(19)上,所述第三电机(18)的旋转运动通过所述联轴器(24)将传到所述传动轴(19)上,所述调节装置(25)将旋转运动调整为直线运动。
4.根据权利要求3所述的一种agv车,其特征在于,所述调节装置(25)可以是滚珠螺母。
5.根据权利要求2所述的一种agv车,其特征在于,所述支撑板(21)表面上设置有防滑层。
6.根据权利要求1所述的一种agv车,其特征在于,所述围板(32)四周设有指示灯(28)。
7.根据权利要求1所述的一种agv车,其特征在于,所述围板(32)四周设有激光导航传感器(29)和激光避障传感器(30)。
8.根据权利要求1所述的一种agv车,其特征在于,所述万向轮(3)两侧设有减震装置(31),所述万向轮(3)的数量为4个。
9.根据权利要求1所述的一种agv车,其特征在于,所述围板(32)下方设有垫块(33)。
10.根据权利要求1所述的一种agv车,其特征在于,所述限位柱(14)上设有位置传感器。
技术总结
本技术公开了一种AGV车,本技术涉及技术领域,包括:底板,所述底板上设有第一电机,所述第一电机驱动端连接有万向轮,所述底板中央设有上升机构,所述上升机构固定连接有固定架,所述固定架四周连接有围板,所述上升机构上设有旋转机构,所述旋转机构位于车身的中央部位,本技术结构简单,通过在底板上设置上升机构,上升机构通过调节装置使传动轴将旋转运动调整为直线运动,并使滑动机构通过滑块在导轨上前后进行移动从而实现顶板的升降功能,上升机构上方连接着旋转机构,首先先通过限位柱上的位置传感器感应到限位块,其次将限位块嵌入限位柱的凹槽内,通过第二电机提供的驱动力。
技术研发人员:孙小荣,张爱爱
受保护的技术使用者:逸顿智能制造(沈阳)有限公司
技术研发日:20230516
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!