一种单臂悬挂式机械手的制作方法
本技术属于机械手领域,尤其涉及一种单臂悬挂式机械手。
背景技术:
1、在现代化生产中,自动化设备是必不可少的机械设备之一,而机械手又是能够取代人工操作的重要设备,机械手通过程序控制操作,能够精确的进行零部件的夹取与放置,随着机械手的发展人工的劳动强度跟随降低,工作效率也跟随着提高。
2、但是,现有的悬挂式机械手在使用过程中,夹持装置一般都是下降到预设的高度后对产品进行夹持,因此不能满足不同高度的产品同时生产需求,如果需要夹取其它高度的产品则需要重新调试,降低生产效率。
技术实现思路
1、针对现有技术的不足,本实用新型提供了一种单臂悬挂式机械手,具备满足不同尺寸产品同时生产的需求,生产效率高的优点,解决了不能满足不同高度的产品同时生产需求,如果需要夹取其它高度的产品则需要重新调试,降低生产效率的问题。
2、为解决上述的技术问题,本实用新型提供如下技术方案:
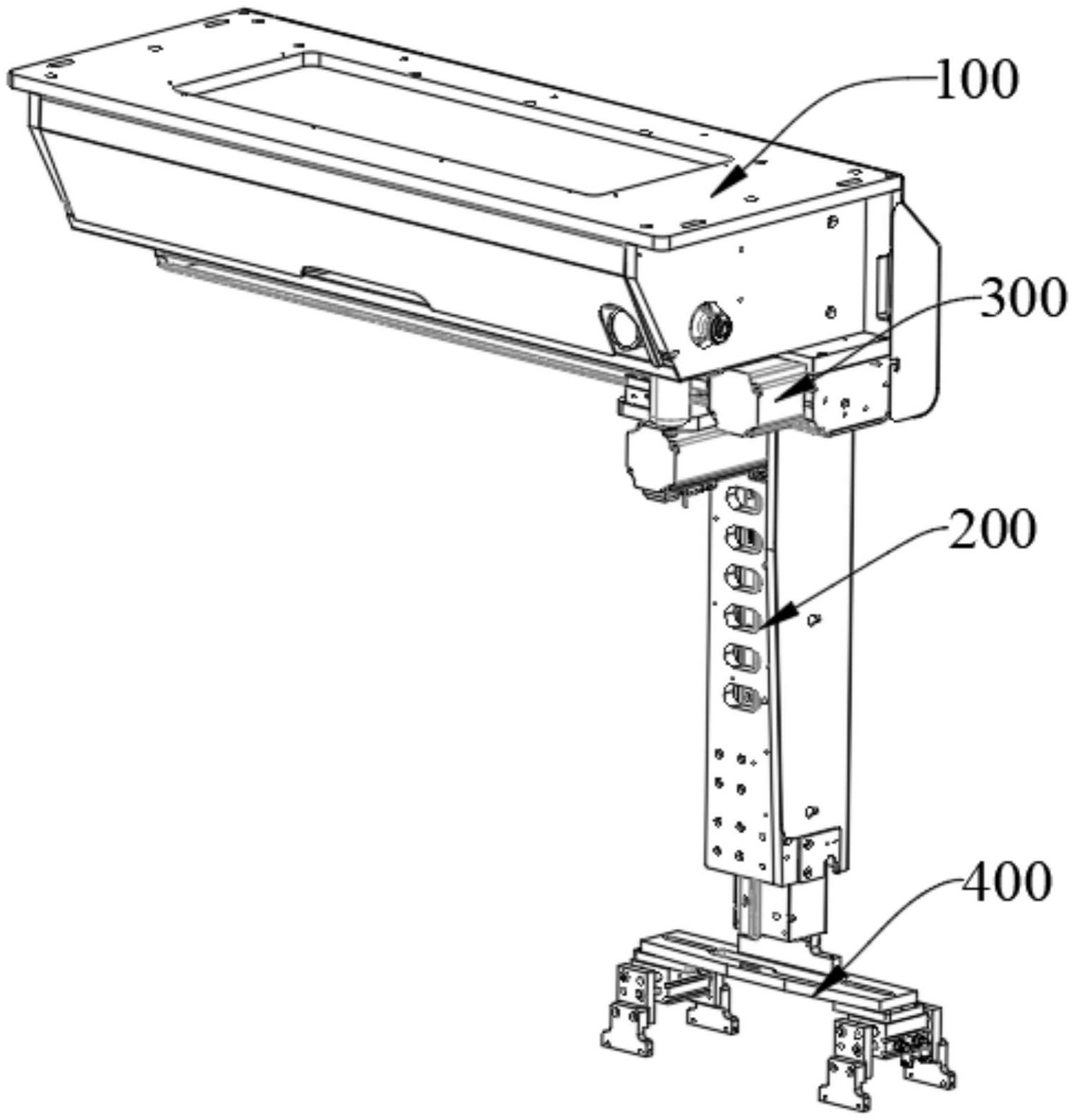
3、一种单臂悬挂式机械手,包括:
4、安装支架;
5、升降悬臂,所述升降悬臂设置在所述安装支架底部,且所述升降悬臂与所述安装支架滑动连接;
6、悬臂驱动,所述悬臂驱动设置在所述安装支架上,所述悬臂驱动的输出端驱动所述升降悬臂在所述安装支架上滑动;
7、夹持装置,所述夹持装置设置在所述升降悬臂远离所述安装支架一端,且所述夹持装置与所述升降悬臂滑动连接。
8、进一步地,所述升降悬臂包括悬臂支架,所述悬臂支架与所述安装支架滑动连接,所述悬臂支架上设置有升降驱动,所述升降驱动的输出端设置有升降支架,所述升降支架位于所述悬臂支架一侧且与所述悬臂支架滑动连接,所述夹持装置与所述升降支架滑动连接。
9、进一步地,所述升降支架一侧固定连接有升降滑轨,所述升降滑轨位于所述升降支架上远离所述安装支架一端,所述夹持装置上与所述升降滑轨对应位置设置有升降滑块,所述升降滑块与所述升降滑轨滑动连接。
10、进一步地,所述升降滑轨的底部设置有升降挡板,所述升降挡板与所述升降支架固定连接。
11、进一步地,所述升降滑轨的数量为两个,两个所述升降滑轨分别与所述升降支架固定连接,所述升降滑块的数量与所述升降滑轨的数量相同,且所述升降滑块分别位于所述夹持装置上与所述升降滑轨对应位置。
12、进一步地,所述升降支架上还固定连接有传感器,且所述传感器位于两个所述升降滑轨之间,所述夹持装置上设置有感应部件,所述感应部件位于两个所述升降滑块之间与所述传感器对应位置。
13、进一步地,所述夹持装置包括夹持支架,所述感应部件固定连接在所述夹持支架的顶部与所述传感器对应位置,所述夹持支架的底部固定连接有手指气缸,所述手指气缸的输出端固定连接有夹持板。
14、进一步地,所述手指气缸的数量为两个,且两个所述手指气缸分别固定连接在所述夹持支架两端。
15、借由上述技术方案,本实用新型提供了一种单臂悬挂式机械手,至少具备以下有益效果:
16、该单臂悬挂式机械手,通过设置夹持装置,夹持装置设置在升降悬臂远离安装支架一端,且夹持装置与升降悬臂滑动连接,当夹持装置与产品接触后,夹持装置会在升降悬臂上滑动,从而能够对不同高度的产品进行夹持,满足不同高度产品的使用需求,提高工作效率。
技术特征:
1.一种单臂悬挂式机械手,其特征在于,包括:
2.根据权利要求1所述的单臂悬挂式机械手,其特征在于,所述升降悬臂(200)包括悬臂支架(210),所述悬臂支架(210)与所述安装支架(100)滑动连接,所述悬臂支架(210)上设置有升降驱动(220),所述升降驱动(220)的输出端设置有升降支架(230),所述升降支架(230)位于所述悬臂支架(210)一侧且与所述悬臂支架(210)滑动连接,所述夹持装置(400)与所述升降支架(230)滑动连接。
3.根据权利要求2所述的单臂悬挂式机械手,其特征在于,所述升降支架(230)一侧固定连接有升降滑轨(240),所述升降滑轨(240)位于所述升降支架(230)上远离所述安装支架(100)一端,所述夹持装置(400)上与所述升降滑轨(240)对应位置设置有升降滑块(410),所述升降滑块(410)与所述升降滑轨(240)滑动连接。
4.根据权利要求3所述的单臂悬挂式机械手,其特征在于,所述升降滑轨(240)的底部设置有升降挡板(260),所述升降挡板(260)与所述升降支架(230)固定连接。
5.根据权利要求4所述的单臂悬挂式机械手,其特征在于,所述升降滑轨(240)的数量为两个,两个所述升降滑轨(240)分别与所述升降支架(230)固定连接,所述升降滑块(410)的数量与所述升降滑轨(240)的数量相同,且所述升降滑块(410)分别位于所述夹持装置(400)上与所述升降滑轨(240)对应位置。
6.根据权利要求5所述的单臂悬挂式机械手,其特征在于,所述升降支架(230)上还固定连接有传感器(250),且所述传感器(250)位于两个所述升降滑轨(240)之间,所述夹持装置(400)上设置有感应部件(420),所述感应部件(420)位于两个所述升降滑块(410)之间与所述传感器(250)对应位置。
7.根据权利要求6所述的单臂悬挂式机械手,其特征在于,所述夹持装置(400)包括夹持支架(430),所述感应部件(420)固定连接在所述夹持支架(430)的顶部与所述传感器(250)对应位置,所述夹持支架(430)的底部固定连接有手指气缸(440),所述手指气缸(440)的输出端固定连接有夹持板(450)。
8.根据权利要求7所述的单臂悬挂式机械手,其特征在于,所述手指气缸(440)的数量为两个,且两个所述手指气缸(440)分别固定连接在所述夹持支架(430)两端。
技术总结
本技术属于机械手领域,尤其涉及一种单臂悬挂式机械手,安装支架;升降悬臂,所述升降悬臂设置在所述安装支架底部,且所述升降悬臂与所述安装支架滑动连接;悬臂驱动,所述悬臂驱动设置在所述安装支架上,所述悬臂驱动的输出端驱动所述升降悬臂在所述安装支架上滑动;夹持装置,所述夹持装置设置在所述升降悬臂远离所述安装支架一端,且所述夹持装置与所述升降悬臂滑动连接。本技术通过设置夹持装置,夹持装置设置在升降悬臂远离安装支架一端,且夹持装置与升降悬臂滑动连接,当夹持装置与产品接触后,夹持装置会在升降悬臂上滑动,从而能够对不同高度的产品进行夹持,满足不同高度产品的使用需求,提高工作效率。
技术研发人员:周成伟,邓永念
受保护的技术使用者:深圳市彼洋自动化科技有限公司
技术研发日:20230524
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!