存储半导体晶圆片的光罩盒的智能仓储的制作方法
本技术涉及半导体晶圆片存储,具体涉及一种用于存储半导体晶圆片的智能仓储结构。
背景技术:
1、半导体晶圆片是半导体制造的重要原料,其上刻有微小的电路图案,用于生产各种集成电路。为了保护晶圆片上的电路图案不受污染或损坏,需要使用光罩盒将晶圆片密封存放。光罩盒是一种特殊的容器,其内部具有洁净的环境,可以防止灰尘、水汽、静电等对晶圆片造成影响。
2、随着半导体技术的发展,晶圆片的尺寸越来越大,光罩盒的数量也越来越多,因此对光罩盒的储存和管理提出了更高的要求。传统的光罩盒储存方式是使用手动或半自动的方式将光罩盒放置在货架或柜子上,这种方式存在以下缺点:占用空间大,储存效率低;人工操作容易造成误操作或损坏;无法实现智能化管理和追溯;无法满足高洁净度和高稳定性的要求。
3、为了解决上述问题,一些技术人员提出了使用智能仓储系统来存储和管理光罩盒的方案。智能仓储系统是一种利用自动化设备和信息技术实现光罩盒的自动化搬运、储存、检索和管理的系统。智能仓储系统具有以下优点:节省空间,提高储存效率;减少人工操作,降低损坏风险;实现智能化管理和追溯,提高生产效率和质量;保证高洁净度和高稳定性,延长光罩盒寿命。
4、现有技术中公开了若干光罩盒智能仓储系统的专利,如申请号为cn201910801498.8公开了一种半导体晶圆片光罩盒自动化仓储系统及其控制方法,该系统包括:多个货架单元、多个货架单元之间设置的传输轨道、沿传输轨道运行的搬运机器人、位于传输轨道两端的进出口装置、位于进出口装置旁边的缓冲区、位于缓冲区旁边的清洗区、位于清洗区旁边的检测区以及控制中心。该系统通过搬运机器人实现光罩盒在货架单元、缓冲区、清洗区、检测区之间的自动化搬运,并通过控制中心实现对整个系统的监控和管理。
5、该技术需要使用搬运机器人进行搬运,存在搬运过程中震动或碰撞导致光罩盒损坏的风险,也存在机器人故障或失控的可能性,影响系统的安全性和可靠性。
6、本技术希望能够提供一种能够对存放半导体光罩盒的循环装置,通过在循环装置内对光罩盒存储循环存储,并通过取料机构对光罩盒存入仓体中或者由仓体中取出放入循环装置中,减少不必要的人工或者机械手的搬运并提升存放光罩盒的效率。
技术实现思路
1、为解决上述技术问题,本实用新型提供了一种能够实现光罩盒的自动取放和旋转移动的存储半导体晶圆片的光罩盒的智能仓储,其目的是,提升对光罩盒存取的效率。
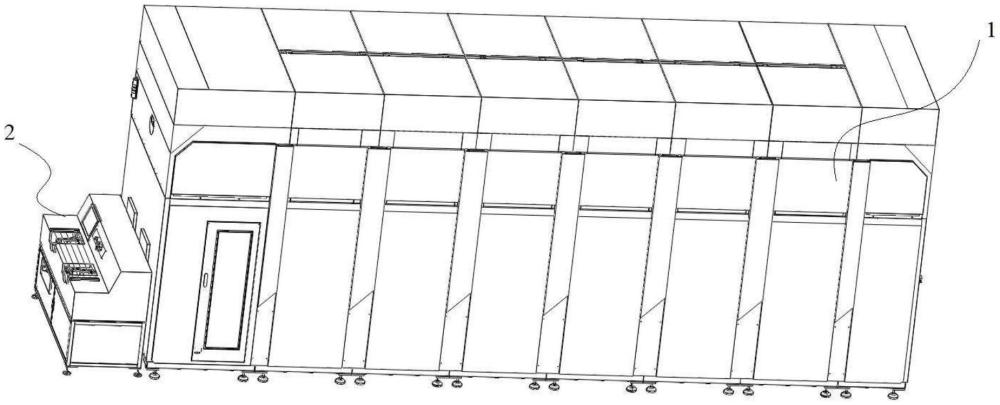
2、一种存储半导体晶圆片的光罩盒的智能仓储,包括仓储体,所述的仓储体的一侧设置有光罩盒移送循环装置用于对光罩盒进行循环移送并通过光罩盒取料装置将光罩盒送入仓储体内,所述光罩盒取料装置将光罩盒送入仓储体内,
3、所述光罩盒移送循环装置,包括机壳,机壳内设置有循环导轨;滚轮,若干个滚轮与所述循环导轨连接,所述滚轮能够沿着所述循环导轨循环运动;治具,若干个治具分别固定在所述滚轮上,所述治具上设置有光罩盒座,用于放置光罩盒;链条传动装置,包括驱动电机和链条,所述驱动电机与所述链条连接,所述链条与所述滚轮连接,用于驱动所述滚轮沿着所述循环导轨循环运动;定位装置,包括定位块和定位传感器,所述定位块设置在所述循环导轨的一侧;进料口和出料口,分别设置在所述机壳的一侧和另一侧,与所述循环导轨相连通,用于光罩盒的进出料;控制单元,与所述驱动电机、所述定位传感器、进料口和出料口连接,用于控制整个装置的运行;
4、所述仓储体上设置有仓门,所述仓门打开后,所述光罩盒取料装置的安装板二将从仓门处伸出后通过负压装置将光罩盒移送循环装置循环移送的光罩盒移送至仓门对应位置的光罩盒吸取后移送入仓储体内;
5、所述光罩盒取料装置包括导轨一,所述的导轨一上设置有行走支撑座,所述的行走支撑座上设置竖向支撑架,所述竖向支撑架上设置竖向导轨,还包括横向支撑板,所述横向支撑板两侧与竖向导轨连接,所述横向支撑板上设置有旋转机构,所述旋转机构上设置有安装板一,所述旋转机构带动所述安装板一做旋转移动;所述安装板一上设置横向导轨一,所述横向导轨一上设置滑块,所述滑块上设置安装板二,所述安装板二上设置有负压装置用于吸取光罩盒;
6、所述仓储体内设置有存储光罩盒的支架。
7、进一步的,所述治具为扁平的矩形结构,所述治具上设置有光罩盒座,所述光罩盒座为凹槽状结构,所述光罩盒座的大小和形状与所述光罩盒的大小和形状相适应,以便将所述光罩盒稳固地放置在所述光罩盒座中,所述治具的底部设置有载体,所述载体与滚轮连接。
8、优选的,在所述机壳两侧设置有传动链轮,所述传动链轮与链条传动连接带动所述滚轮沿着所述循环轨道运动。
9、优选的,所述载体上还设置有缺口,所述定位块能够卡接入所述缺口内,以固定所述治具的位置。
10、进一步的,所述定位块为直杆状结构,所述定位传感器为光电传感器;在所述载体的缺口为凹槽状结构,所述缺口的大小和形状与所述定位块的大小和形状相适应,以便将所述定位块卡接入所述缺口内,以固定所述治具的位置。
11、进一步的,所述负压装置包括丝杆,所述丝杆连接安装板三,电机驱动所述丝杆转动带动所述安装板三沿着所述丝杆上下移动,所述安装板三上设置真空发生器,所述安装板三设置有吸板,所述吸板内设置有气体通路,所述吸板内的气体通路与气嘴联通,所述气嘴与真空发生器通过气管联通,所述的吸板连接有硅胶垫,所述硅胶垫上设置有若干个通孔。
12、进一步的,所述安装板三上设置有丝杆框架,所述丝杆一端连接于框架的通孔内,所述安装板二的一侧设置有丝杆电机,所述丝杆电机的输出轴通过皮带轮驱动所述丝杆转动;
13、所述旋转机构包括旋转底座,所述旋转底座上设置有转动盘,所述转动盘与所述安装板二固定连接;
14、所述安装板二的一端设置有传动电机,所述传动电机的输出轴与第一传动齿轮连接,所述安装板二的另一侧设置有第二传动齿轮,所述第一传动齿轮与第二传动齿轮通过具有齿条的传动皮带连接,所述安装板三的底部固定连接有连接块,所述连接块的内侧设置有与传动皮带的齿条啮合传动。
15、本实用新型提供的一种存储半导体晶圆片的光罩盒的智能仓储,其有益效果在于,
16、光罩盒放置于光罩盒移送循环装置内进行循环移送,现了光罩盒的自动化循环进出料,提高了光罩盒的使用效率和安全性,避免了人工搬运和仓储管理的低效和风险;其中,链条、链轮和电机组成驱动装置驱动滚轮在循环轨道上运转,使得光罩盒可以在机壳内按照预设程序进行循环移动和进出料。所述移送循环装置的壳体侧面设置有与仓储体的仓门对接的进出料口,通过该料口光罩盒取料装置的安装板二能够通过负压吸取的方式将光罩盒从治具上取出送入仓储体内,或者从仓储体内将光罩盒放入治具内。
17、所述的光罩盒取料机构,通过设置旋转机构和负压装置,可以根据不同的取放位置和方向,对光罩盒进行精确的定位和吸取,避免了人工或机械手臂操作时可能造成的光罩盒的损坏或污染,提高了光罩盒的处理效率和安全性。进一步通过设置丝杆、电机、真空发生器、吸板等组件,实现了负压装置的上下移动和真空吸附功能,可以根据不同高度和大小的光罩盒进行适应性的调节和吸取,增加了光罩盒取料机构的适用范围和灵活性。
18、当光罩盒收入仓储体内,需要将光罩盒在仓储体内设置有导轨一,所述的导轨一上设置有行走支撑座,所述的行走支撑座上设置竖向支撑架,所述竖向支撑架上设置竖向导轨,还包括横向支撑板。所述横向支撑板两侧与竖向导轨连接,所述横向支撑板上设置有旋转机构。行走支撑座在导轨一上移动至存储光罩盒的支架位置,并通过横向支撑板上在竖向导轨上移动,到达支撑架相应的高度位置。最终旋转座旋转后,所述安装板二伸缩将光罩盒送入支架上。当需要将光罩盒从仓储体内将光罩盒取出的时候,则由安装板二移动至指定的支架位置将光罩盒取下后,通过光罩盒取料机构将光罩盒放在循环装置的治具上。由循环装置将光罩盒在循环装置内移送至后端等待排位使用或者移送至循环装置外使用。
19、通过本智能仓储能够实现对光罩盒在仓储体外的循环存储功能,避免人工对光罩盒的反复搬运,通过取料机构在垂直方向的调节和吸取,增加了对光罩盒取料机构的移动范围和精度。整体提升对光罩盒存取的效率。
- 还没有人留言评论。精彩留言会获得点赞!