一种机器人自动化搬运夹持装置
本技术涉及搬运机器人,具体是一种机器人自动化搬运夹持装置。
背景技术:
1、随着自动化技术的飞速发展,自动化类的设备层出不穷,而在搬运物流方面,智慧物流也逐渐开始占主导地位,自动化搬运机器人则是一种广泛应用在物流以及生产方面的搬运设备。
2、现有技术中,如公开号为cn218258457u中国专利公开的一种自动化搬运机器人,涉及搬运机器人技术领域。本实用新型包括载物平台、控制机构、侧防滑落部件和捆绑组件,载物平台前侧连接有控制机构,载物平台两侧位置对应转动连接有侧防滑落部件,载物平台两侧在侧防滑落部件两侧的对应位置连接有捆绑组件。该实用新型通过设置简单的捆绑组件和可以转动的防落挡板,能够快速实现物件的捆绑,也能放下挡板避免物件碰撞破损,解决了现有的自动化搬运机器人无绑带可能会引起物体侧翻,有绑带的设备拆卸麻烦,影响效率以及装有侧防落板的设备放置物件可能会损伤物件且不便放置大物件的问题。
3、但该专利还存在不足之处,该专利仅仅使用绑带作为携带物品的固定器具,结构较为简单,固定效果差,且每次装载或卸下物品时,都需要安装绑带或是松开绑带,比较麻烦;而且在搬运的过程中如遇颠簸路段,容易出现绑带松动,物品掉落的情况,故提出一种机器人自动化搬运夹持装置来解决上述问题。
技术实现思路
1、本实用新型的目的在于提供一种机器人自动化搬运夹持装置,以解决上述背景技术中提出的问题。
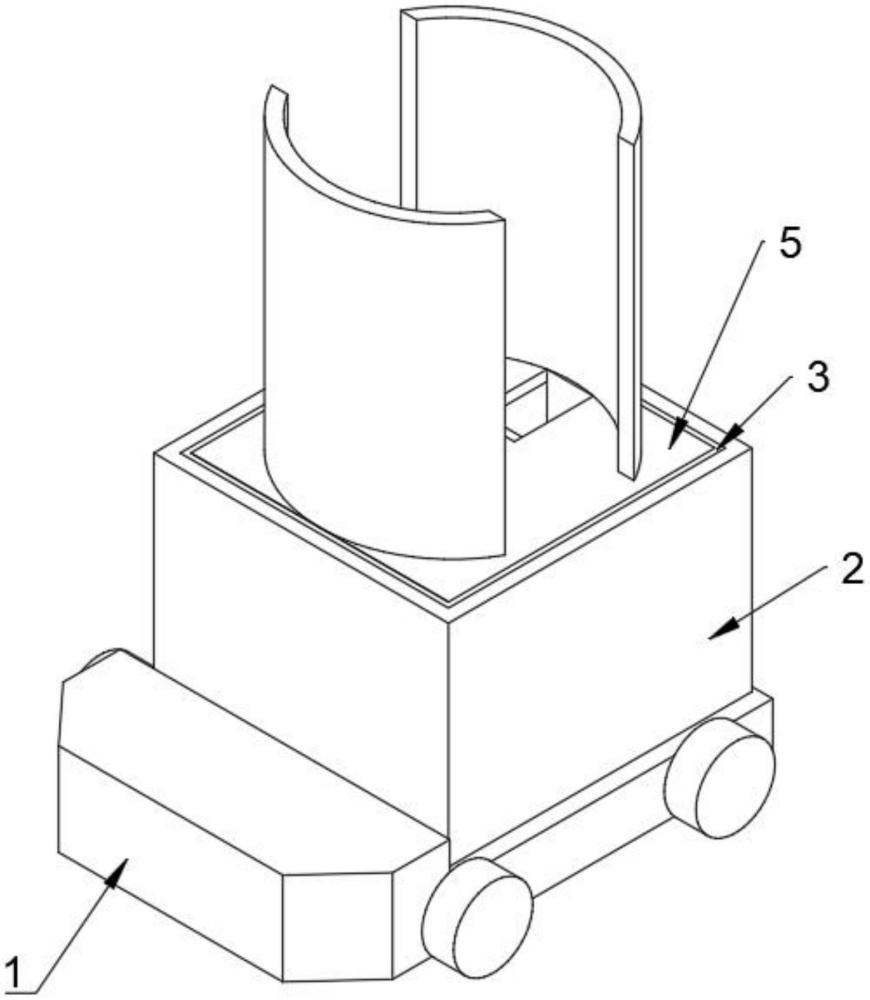
2、本实用新型的技术方案是:一种机器人自动化搬运夹持装置,包括搬运机器人本体,所述搬运机器人本体的上表面固定连接有减震底台,所述减震底台的内壁滑动连接有自动夹持仓室,所述减震底台内设置有减震组件,所述减震组件与自动夹持仓室相连接,所述自动夹持仓室内设置有自动夹持组件。
3、优选的,所述减震组件包括与减震底台的内壁固定连接的固定柱,所述固定柱的表面滑动连接有两个阻尼块,所述减震底台的两侧均固定连接有缓冲弹簧,两个所述缓冲弹簧相互靠近的一端分别与两个阻尼块互相远离的一侧固定连接。
4、优选的,所述减震组件还包括与两个阻尼块的上端开口处转动连接的缓冲杆,所述自动夹持仓室的下表面固定连接有连接座,两个所述缓冲杆远离阻尼块的一端与连接座的内壁转动连接。
5、优选的,所述自动夹持组件包括与自动夹持仓室的内壁转动连接的齿轮柱,所述自动夹持仓室的内底壁滑动连接有两个移动板,两个所述移动板互相靠近的一侧均固定连接有夹持齿条,所述夹持齿条与齿轮柱相啮合,两个所述移动板的上表面均固定连接有夹持板。
6、优选的,所述自动夹持组件还包括与自动夹持仓室的内壁滑动连接的重力触发板,所述重力触发板的下表面固定连接有触发齿条,所述触发齿条板与齿轮柱相啮合。
7、优选的,所述重力触发板的下表面固定连接有若干复位弹簧,所述复位弹簧远离重力触发板的一端与自动夹持仓室的内底壁固定连接。
8、本实用新型通过改进在此提供一种机器人自动化搬运夹持装置,与现有技术相比,具有如下改进及优点:
9、其一:本实用新型,通过将需要搬动的物体放在重力触发板上(放置于两个夹持板之间的区域),当重力触发板受到重力,会使得重力触发板和触发齿条向下运动,在啮合作用下,齿轮柱转动,使得两个夹持齿条向互相靠近的方向移动,带动移动板和夹持板一同移动,将处于两个夹持板内的物体夹持住,形成固定,能够更加方便快捷的对物体进行固定,且在卸货时只需将重物拿出,自动夹持组件便会自动复位,相对于绑带,本装置在取拿货物时,更加方便快捷,能够提高搬运转运的工作效率;
10、其二:本实用新型,通过在遇到颠簸路段时,移动座上下颠簸移动,使得缓冲杆发生偏转,同时将两个阻尼块向靠近缓冲弹簧的一端压制,利用缓冲弹簧的反作用力抵消受到的颠簸,减轻整体运输时物体的颠簸程度,使得搬运物品时更稳定,物品更安全。
技术特征:
1.一种机器人自动化搬运夹持装置,包括搬运机器人本体(1),其特征在于:所述搬运机器人本体(1)的上表面固定连接有减震底台(2),所述减震底台(2)的内壁滑动连接有自动夹持仓室(3),所述减震底台(2)内设置有减震组件(4),所述减震组件(4)与自动夹持仓室(3)相连接,所述自动夹持仓室(3)内设置有自动夹持组件(5)。
2.根据权利要求1所述的一种机器人自动化搬运夹持装置,其特征在于:所述减震组件(4)包括与减震底台(2)的内壁固定连接的固定柱(401),所述固定柱(401)的表面滑动连接有两个阻尼块(402),所述减震底台(2)的两侧均固定连接有缓冲弹簧(403),两个所述缓冲弹簧(403)相互靠近的一端分别与两个阻尼块(402)互相远离的一侧固定连接。
3.根据权利要求1所述的一种机器人自动化搬运夹持装置,其特征在于:所述减震组件(4)还包括与两个阻尼块(402)的上端开口处转动连接的缓冲杆(404),所述自动夹持仓室(3)的下表面固定连接有连接座(405),两个所述缓冲杆(404)远离阻尼块(402)的一端与连接座(405)的内壁转动连接。
4.根据权利要求1所述的一种机器人自动化搬运夹持装置,其特征在于:所述自动夹持组件(5)包括与自动夹持仓室(3)的内壁转动连接的齿轮柱(501),所述自动夹持仓室(3)的内底壁滑动连接有两个移动板(502),两个所述移动板(502)互相靠近的一侧均固定连接有夹持齿条(503),所述夹持齿条(503)与齿轮柱(501)相啮合,两个所述移动板(502)的上表面均固定连接有夹持板(504)。
5.根据权利要求1所述的一种机器人自动化搬运夹持装置,其特征在于:所述自动夹持组件(5)还包括与自动夹持仓室(3)的内壁滑动连接的重力触发板(505),所述重力触发板(505)的下表面固定连接有触发齿条(506),所述触发齿条(506)与齿轮柱(501)相啮合。
6.根据权利要求5所述的一种机器人自动化搬运夹持装置,其特征在于:所述重力触发板(505)的下表面固定连接有若干复位弹簧(6),所述复位弹簧(6)远离重力触发板(505)的一端与自动夹持仓室(3)的内底壁固定连接。
技术总结
本技术涉及搬运机器人技术领域,具体是一种机器人自动化搬运夹持装置,包括搬运机器人本体,搬运机器人本体的上表面固定连接有减震底台,减震底台的内壁滑动连接有自动夹持仓室,减震底台内设置有减震组件,减震组件与自动夹持仓室相连接,自动夹持仓室内设置有自动夹持组件。本技术通过将需要搬动的物体放在重力触发板上(两个夹持板之间的区域),使得触发齿条向下运动,齿轮柱转动使两个夹持齿条带动移动板和夹持板一同移动,将处于两个夹持板内的物体夹持住,能够更加方便快捷的对物体进行固定,在卸货时只需将重物拿出,自动夹持组件便会自动复位,相对于绑带,本装置在取拿货物时,更加方便快捷,能够提高搬运转运的工作效率。
技术研发人员:刘慕然,周爽
受保护的技术使用者:华北电力大学
技术研发日:20240127
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!