一种用于电容器缓存的空中移载机的制作方法
本技术属于机械自动化,尤其涉及一种用于电容器缓存的空中移载机。
背景技术:
1、目前为提高生产效率,各种转向输送机构已被广泛应用。如在洗衣机制造业中,输送线体应用了各种转向输送机构,在应用较广的输送方式为齿轮、齿条传动或由无杆气缸驱动且转向机构又是另一整体。结合以往电力电容器中的生产实际,可以发现这种输送方式有很多的局限性且所占空间大,资源比较浪费;例如:齿轮齿条的加工成本高,加工和装配所需的精度要求难以保证,并且齿轮齿条的运行需要润滑,而这些润滑油脂会给生产场所造成较大的污染,同时也污染了操作者的工作环境,给工作人员的人身健康带来了不好的影响;而由无杆气缸驱动则在起动或停止时均会带来冲击,且对于电气来说也不好控制;另外这两种输送方式速度低、不能高速行驶、生产周期加长,严重影响了生产效率。
2、通过上述分析,现有技术存在的问题及缺陷为:
3、现有技术的输送机构在电容器环节有工艺不平衡、产量低、转运难度大、周转空间大的问题。
技术实现思路
1、针对现有技术存在的问题,本实用新型提供了一种用于电容器缓存的空中移载机。
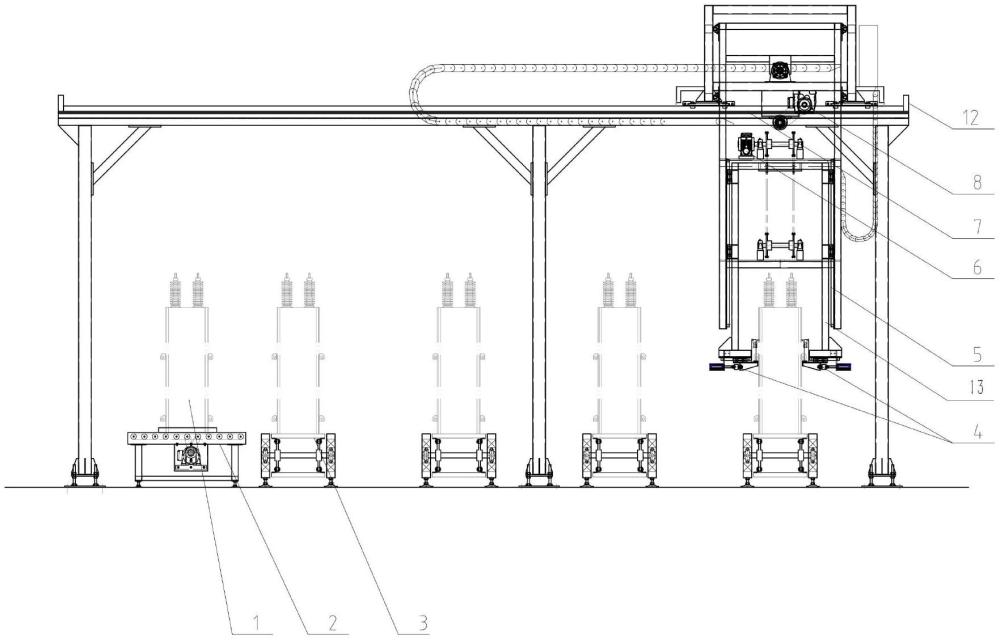
2、本实用新型是这样实现的,一种用于电容器缓存的空中移载机包括:定位输送机、链板缓存机、气动夹爪、升降导轨、升降驱动装置、平移导轨、平移驱动装置、横向移动导轨、横向气动装置、主体框架、阻挡器、气动夹爪架;主体框架上设置升降驱动装置、横向气动装置和平移驱动装置,升降驱动装置与升降导轨连接,横向气动装置与横向移动导轨连接,平移驱动装置与平移导轨连接,气动夹爪架分别与升降导轨、横向移动导轨、平移导轨连接,气动夹爪架底部设置气动夹爪,主体框架顶部设置阻挡器,主体框架内部设置定位输送机和链板缓存机。
3、进一步,气动夹爪是由两个对称的夹爪进行夹紧固定的。
4、进一步,定位输送机与主体框架不连接,数量和位置可根据实际需要设置。
5、进一步,链板缓存机与主体框架不连接,数量和位置可根据实际需要设置。
6、进一步,气动夹爪架的平移和横动由主体框架顶部的阻挡器进行限位。
7、进一步,平移驱动装置、升降驱动装置有内置电机。
8、进一步,气动夹爪架为u型结构。
9、结合上述的技术方案和解决的技术问题,本实用新型所要保护的技术方案所具备的优点及积极效果为:
10、第一、本实用新型解决了现有技术的输送机构在电容器环节有工艺不平衡、产量低、转运难度大、周转空间大的问题,采用空中抓取移动的方式进行换线缓存,能适应小型电容器。
11、第二,将本实用新型应用到电力电容器的生产环节,可显著提高产量、降低运转难度,空中抓取能适应小型电容器并且对比现有的移栽机本发明仅需很小的空间就能实现周转,提高了生产效率。
12、第三,作为本实用新型的权利要求的创造性辅助证据,还体现在以下几个重要方面:
13、1)高效自动化:整个移载机系统实现了电容器的自动输送、夹紧、升降、平移和横向移动,大大提高了生产效率和自动化程度。
14、2)灵活配置:定位输送机和链板缓存机与主体框架不连接,数量和位置可根据实际需要设置,提供了高度的灵活性和适应性。
15、3)精确控制:平移驱动装置、升降驱动装置内置电机,实现精确的位置控制,同时气动夹爪架的平移和横动由主体框架顶部的阻挡器进行限位,确保操作安全可靠。
16、4)稳定夹持:气动夹爪由两个对称的夹爪进行夹紧固定,实现了稳定可靠的电容器夹持。
17、5)结构紧凑:气动夹爪架为u型结构,占地面积小,可以节省空间资源。
18、6)易于维护:各个驱动装置和气动装置设计合理,便于日常维护和检修。
19、7)适应性强:该空中移载机适用于不同类型和尺寸的电容器,具有广泛的适应性。
20、总之,该用于电容器缓存的空中移载机通过合理的结构设计和精确的控制系统,实现了高效、稳定、安全的电容器输送与缓存功能,为电容器生产线提供了有效的支持。
技术特征:
1.一种用于电容器缓存的空中移载机,其特征在于,该用于电容器缓存的空中移载机的主体框架上设置升降驱动装置、横向气动装置和平移驱动装置,升降驱动装置与升降导轨连接,横向气动装置与横向移动导轨连接,平移驱动装置与平移导轨连接;气动夹爪架分别与升降导轨、横向移动导轨、平移导轨连接,气动夹爪架底部设置气动夹爪;定位输送机和链板缓存机设置在主体框架内部;阻挡器设置在主体框架顶部,用于限位气动夹爪架的运动。
2.如权利要求1所述的用于电容器缓存的空中移载机,其特征在于,通过升降驱动装置、横向气动装置和平移驱动装置带动气动夹爪架在升降导轨、横向移动导轨和平移导轨上运动,气动夹爪架带动气动夹爪进行定位、夹持、移载和缓存电容器,定位输送机和链板缓存机用于输送和缓存电容器,阻挡器用于限位气动夹爪架运动轨迹。
3.如权利要求1所述的用于电容器缓存的空中移载机,其特征在于,链板缓存机与主体框架不连接,数量和位置可根据实际需要设置。
4.如权利要求1所述的用于电容器缓存的空中移载机,其特征在于,气动夹爪架的平移和横动由主体框架顶部的阻挡器进行限位。
5.如权利要求1所述的用于电容器缓存的空中移载机,其特征在于,平移驱动装置、升降驱动装置有内置电机。
6.如权利要求1所述的用于电容器缓存的空中移载机,其特征在于,气动夹爪架为u型结构。
技术总结
本技术属于机械自动化技术领域,公开了一种用于电容器缓存的空中移载机,包括:定位输送机、链板缓存机、气动夹爪、升降导轨、升降驱动装置、平移导轨、平移驱动装置、横向移动导轨、横向气动装置等;主体框架上设置升降驱动装置、横向气动装置和平移驱动装置,升降驱动装置与升降导轨连接,横向气动装置与横向移动导轨连接,平移驱动装置与平移导轨连接,气动夹爪架分别与升降导轨、横向移动导轨、平移导轨连接,气动夹爪架底部设置气动夹爪,主体框架顶部设置阻挡器,主体框架内部设置定位输送机和链板缓存机。解决了现有技术的输送机构在电容器环节有工艺不平衡、产量低、转运难度大、周转空间大的问题。
技术研发人员:杨勇,翟紫峰
受保护的技术使用者:西安飞仕达智能科技有限公司
技术研发日:20230823
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!