一种导丝与血管间动态阻力计算的系统
(一)本发明涉及的是一种导丝与血管间动态阻力计算的系统,可用于微创介入式医疗机器人手术中,属于介入式生物医疗领域。
背景技术:
0、(二)背景技术
1、介入式手术是一种微创手术技术,治疗全程在影像设备的引导和监视下进行,利用导丝导管等器械通过人体内的血管或其他自然腔道,进入机体内部进行诊断和治疗,介入式手术能够准确地直接到达病变局部,同时又没有大的创伤,因此具有准确、安全、高效、适应证广、并发症少等优点。目前,介入式手术已经在多个领域得到应用,其中最常见的包括心血管介入、放射介入、内镜介入和神经介入等,并成为治疗血管疾病的主流方法。而微创介入式手术机器人作为介入式手术中的一种新型手术技术,与传统手术相比,通过操纵装置模拟实际手部动作将导丝等医疗器械输送至患者病灶实施诊断与治疗,手术时医护人员不需要在病床旁边,只需要在远离现场辐射环境的操纵间中远程控制手术机器人执行各种动作即可完成手术,同时借助医疗影像和机器人反馈力信息判断手术效果并进行安全保障。利用手术机器人,手术精度得到明显提高,也保障了医护人员的安全。
2、在采用微创介入式手术机器人进行手术的过程中,人手不直接接触导丝导管,无法感知导丝导管插入时的反馈力,易对人体血管造成损伤,针对这类问题,专利cn114191082a提出了一种血管介入手术机器人导丝夹持与导丝阻力测定装置,能精准完成导管与导丝夹持和递送过程中的轴向阻力检测,但是仅仅依据机器人反馈力信息,保障手术操作安全的方式是具有风险的,因系统控制的滞后性,一旦机器人反馈导丝对病人血管作用力过大,系统的滞后性使导丝继续推进导致危险的发生,因此需要一种新型的导丝在推进过程中所受作用力计算的方法,用以提前计算导丝推进所需力的大小,避免介入式导丝推进时推进力过大对血管产生破坏。
3、本发明提出了一种导丝与血管间动态阻力计算的系统,用于实时显示导丝与血管间的阻力,为导丝提供了在推进过程中所需推进力的大小。本方法使介入式手术操作更精确,提高了手术的安全性。
技术实现思路
0、(三)
技术实现要素:
1、本发明的目的在于提供一种导丝与血管间动态阻力计算的系统,该系统基于多芯光纤进行三维形状感测,具有精确度高、安全性好的优点。
2、本发明的目的是这样实现的:
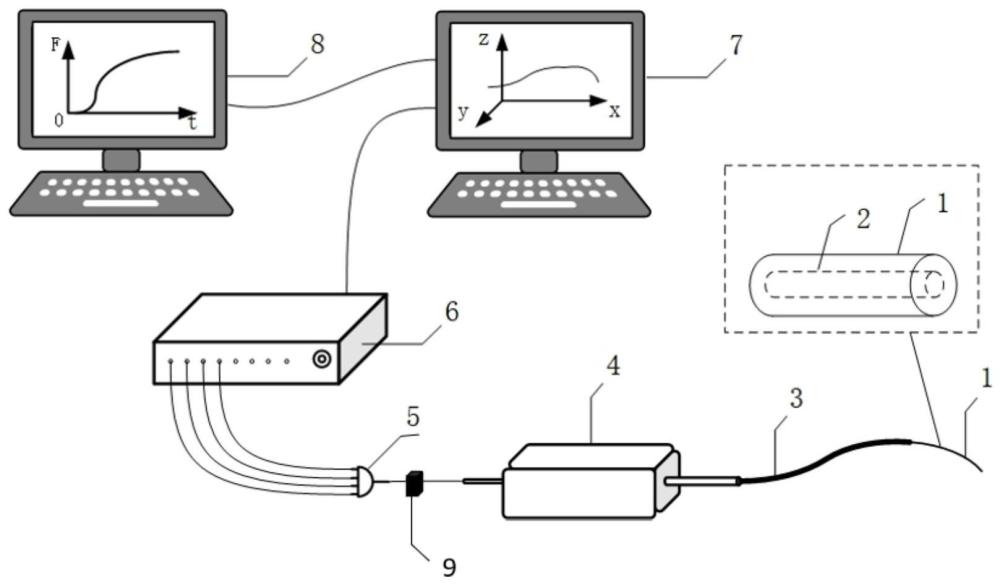
3、它由介入式导丝、刻有光栅阵列的多芯光纤、介入式导管、导丝导管递送装置、活动连接器、多芯光纤扇入扇出器、光栅解调仪、三维形状还原系统和动态阻力计算系统组成,所述系统中刻有光栅阵列的多芯光纤用于介入式导丝形状的检测;导丝导管递送装置用于将介入式导丝与介入式导管分别向前递送;刻有光栅阵列的多芯光纤通过活动连接器和多芯光纤扇入扇出器与光栅解调仪相连,三维形状还原系统用于处理光栅解调仪测量的信号并对介入式导丝在血管内的形状进行还原,实现远程实时三维形状检测;动态阻力计算系统通过三维形状还原系统还原出的介入式导丝在血管内的形状,计算介入式导丝插入后与血管间的动态阻力并显示。
4、该介入式导丝内部为空心结构,刻有光栅阵列的多芯光纤被固定在导丝内部的空心结构中,因此不可在介入式导丝内部发生相对转动。
5、对病人血管进行ct血管造影扫描,通过静脉注射对比剂,使用ct设备进行血管成像,根据扫描得到的数据采用三角形表面网格的方法,在计算机上进行人体局部血管群模型的重建。
6、多芯光纤由一个中间芯和不少于三个的边芯构成,多芯光纤尾端通过活动连接器与多芯光纤扇入扇出器和光栅解调仪相连,使用活动连接器易于更换内部刻有光栅阵列的多芯光纤的介入式导丝,降低手术成本,计算机用于处理光栅解调仪测量的信号并对多芯光纤三维形状进行还原。
7、本发明所使用三维形状还原的原理为光弹理论。
8、根据光弹理论,光栅轴向应变和温度引起的波长变化为:
9、
10、式中:δλb为光栅中心波长变化量,neff为栅区的有效折射率,λ为光栅的周期,ε为外加应变,pi,j为光弹性张量的普克尔压电系数,v为泊松比,α为光纤材料的热膨胀系数,δt为温度变化量。
11、光栅中心波长受到外界因素影响产生偏移,通过波长的变化δλb可解出被测量的物理量的值。
12、刻有光栅阵列的多芯光纤固定在介入式导丝内部,与介入式导丝具有相同的三维形状,进而可以还原介入式导丝插入血管后的实时形状。
13、在介入式导丝插入的过程中,通过计算机上还原的介入式导丝弯曲方向与形状,与ct血管造影扫描后重建的人体局部血管群模型进行对比,确认介入式导丝所进入的血管及在血管中的具体位置,并在三维形状还原系统上进行实时显示。
14、在导丝的推进过程中,导丝与血管相接触产生阻碍导丝向前推送的摩擦力,导丝与血管的接触模式可以由三维形状还原系统实时显示,动态阻力计算系统依据三维形状还原系统,根据导丝与血管不同的接触曲率将接触离散化为n段,导丝导管递送装置可以分别将介入式导丝与介入式导管以恒定的速度向前递送,此时导丝受力平衡,对导丝与血管间接触进行受力分析:
15、因导丝与血管是弹性体,在接触时会产生形变,接触形式为非协调接触,因此我们采用赫兹接触理论;根据赫兹接触理论,两弹性体相互挤压时,接触应力形式上呈现非均匀椭球分布,即接触面中心点处压力最大,接触边缘压力为0,接触正压力的二次曲线分布函数为:
16、p(ξ)=aξ2+b; (2)
17、根据压力分布图的对称性可得:
18、
19、即两弹性体接触压力p(ξ)近似为二次曲线分布,其表达式为:
20、
21、由y方向静力平衡关系得:
22、
23、于是解得:
24、
25、第i段弯曲段接触正压力为:
26、
27、其中1≤i≤n;
28、则接触应力二次曲线分布下的弯曲孔道摩阻为:
29、
30、其中,ri为第i段弯曲段曲率半径,ai为第i段弯曲段接触角,ti为第i段弯曲段前端所受力,ti+1为第i段弯曲段后端所受力,p0为弯曲段接触面中心点处最大压力,ξ为弯曲端至计算截面弯曲段部分切线的夹角绝对值之和,μ是导管与导丝间摩擦系数;
31、导丝推进过程中,导丝与血管相接触产生阻碍导丝向前推送的摩擦力为各弯曲段导丝与血管接触摩擦力的总和:
32、f=f1+f2+……+fn; (9)
33、动态阻力计算系统用以实时显示介入式导丝与血管间的动态阻力。
技术特征:
1.一种导丝与血管间动态阻力计算的系统,其特征是:它由介入式导丝、刻有光栅阵列的多芯光纤、介入式导管、导丝导管递送装置、活动连接器、多芯光纤扇入扇出器、光栅解调仪、三维形状还原系统和动态阻力计算系统组成,所述系统中刻有光栅阵列的多芯光纤用于介入式导丝形状的检测;导丝导管递送装置用于将介入式导丝与介入式导管分别向前递送;刻有光栅阵列的多芯光纤通过活动连接器和多芯光纤扇入扇出器与光栅解调仪相连,三维形状还原系统用于处理光栅解调仪测量的信号并对介入式导丝在血管内的形状进行还原,实现远程实时三维形状检测;动态阻力计算系统通过三维形状还原系统还原出的介入式导丝在血管内的形状,计算介入式导丝插入后与血管间的动态阻力并显示。
2.根据权利要求1所述的一种导丝与血管间动态阻力计算的系统,其特征是:三维形状还原系统中包含对病人血管进行ct血管造影扫描后,根据扫描得到的数据采用三角形表面网格进行人体血管重建模型,并与三维形状还原后的介入式导丝进行对比,可实时显示介入式导丝在血管中的位置与形状。
3.根据权利要求1所述的一种导丝与血管间动态阻力计算的系统,其特征是:动态阻力计算系统通过三维形状还原系统中介入式导丝与血管的动态接触模式,计算介入式导丝与血管间的动态阻力并显示。
技术总结
本发明提供的是一种导丝与血管间动态阻力计算的系统。其特征是:它由介入式导丝、刻有光栅阵列的多芯光纤、介入式导管、导丝导管递送装置、活动连接器、多芯光纤扇入扇出器、光栅解调仪、三维形状还原系统和动态阻力计算系统组成。本发明可用于实时还原导丝的三维形状及进行导丝与血管间的动态阻力计算,可广泛用于微创介入式医疗机器人手术中。本发明属于介入式生物医疗领域。
技术研发人员:苑立波,王骅御,王洪业
受保护的技术使用者:桂林电子科技大学
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!