一种封头抱夹翻转工装的制作方法
本技术涉及lng气瓶生产,具体为一种封头抱夹翻转工装。
背景技术:
1、在lng气瓶生产制作过程中,需要对气瓶封头进行焊接、打磨以及组对操作,封头会在不同工序间频繁的转运,并且需要翻转作业。
2、在生产过程中,常采用人工搬运或者真空吸盘的方式搬运封头,但是由于封头尺寸较大、重量较重,因此采用人工搬运时操作困难,而且存在掉落伤人的安全隐患,而采用真空吸盘搬运封头时,难以实现封头180度翻转,并且真空吸盘的方式在翻转的过程中定位精度较差,在翻转完成后经常存在轻微的倾斜,因此需要配合人工操作才能满足对封头的定位,从而满足对封头进行搬运和翻转的生产作业需求,也比较费时费力。
技术实现思路
1、解决的技术问题
2、针对现有技术的不足,本实用新型提供了一种封头抱夹翻转工装,解决了现有对lng气瓶封头翻转和搬运的方式存在费时费力的问题。
3、技术方案
4、为实现上述目的,本实用新型提供如下技术方案:
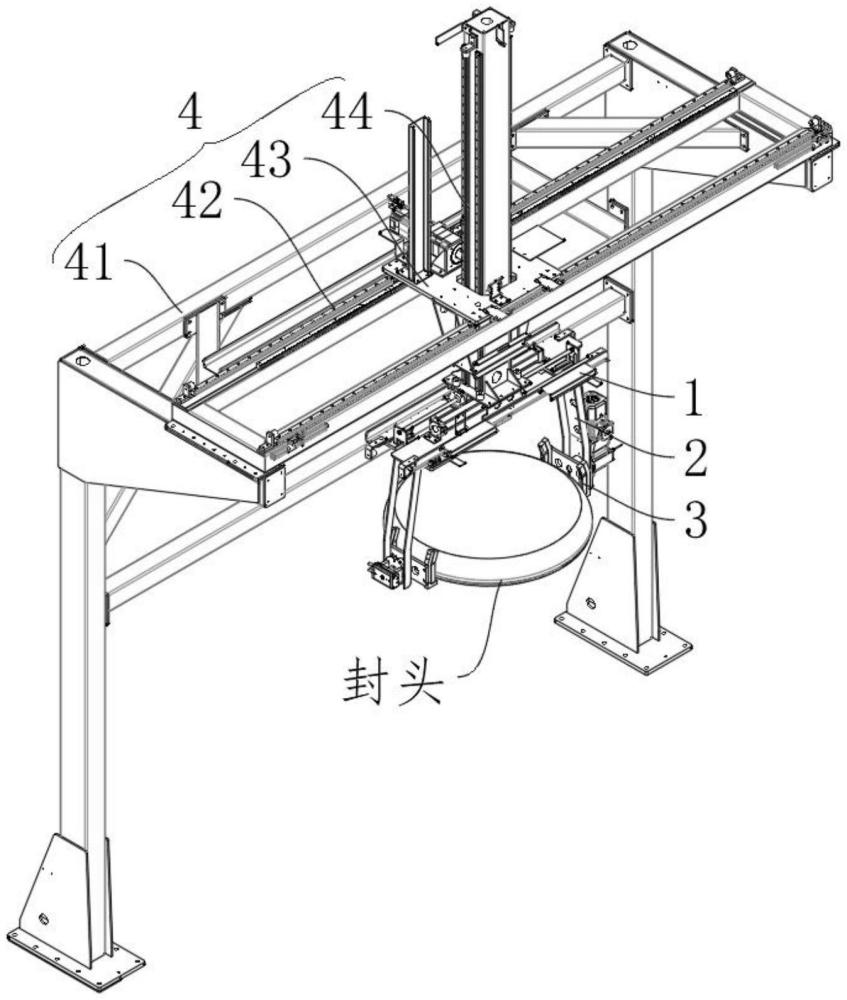
5、一种封头抱夹翻转工装,包括作为安装载体的顶板,所述顶板上对称安装有两个可相对滑动的夹臂机构,两个夹臂机构相对的一侧上均安装有用于配合翻转封头的翻转机构。
6、所述夹臂机构包括滑动设置在顶板上的夹臂本体,还包括用于驱动两个夹臂本体同步移动的驱动组件。
7、所述翻转机构包括转动安装在夹臂本体下部的夹爪组件,夹臂本体上安装有用于驱动夹爪组件转动的转动装置,夹爪组件上安装有用于检测封头是否夹紧的检测组件。
8、作为优选,所述驱动组件包括水平固定在夹臂本体上部的齿条,顶板上转动安装有与两个齿条啮合的齿轮,顶板上固定有用于分别驱动两个夹臂本体移动的两个第一驱动装置。
9、作为优选,所述夹爪组件包括转动安装在夹臂本体上的夹爪安装板,夹爪安装板上安装有用于夹持封头的夹持件,两个夹持件相对的一侧安装有缓冲块。
10、作为优选,所述转动装置包括安装于其中一个夹臂本体上用于驱动相对应的夹爪组件转动的翻转电机,还包括安装于另一个夹臂本体上用于驱动相对应的夹爪组件转动的旋转气缸。
11、作为优选,所述检测组件包括滑动安装在夹爪组件之间夹持部位的接触件,接触件远离另一个夹爪组件的一端固定有感应块,接触件与夹爪组件之间安装有支撑弹簧,夹爪组件上固定有用于探测感应块位置的感应器。
12、作为优选,所述夹爪安装板的转动轴上固定有感应片,夹臂本体的侧壁上固定有用于探测感应片转动角度的探头。
13、作为优选,地面上安装有用于固定顶板的支撑机构,所述支撑机构包括设置于地面上的支架,支架上水平安装有电动滑轨,电动滑轨上传动安装有固定板,固定板上安装有用于驱动顶板升降的电动升降轨道。
14、有益效果
15、与现有技术相比,本实用新型提供了一种封头抱夹翻转工装,具备以下
16、有益效果:
17、1、本实用新型通过第一驱动装置、齿条、齿轮、夹臂组件和夹爪组件的相互配合,可以保证左右夹臂组件抱夹动作的同步性,提高抱夹翻转封头过程的稳定性,再由夹爪组件上的检测机构检测封头夹紧到位,控制第一驱动装置锁紧,有效防止工装翻转过程中封头脱落,并完成对封头的翻转,从而节省人力,更好的实现生产自动化。
18、2、本实用新型可以直接安装对接支撑机构,实现封头自动抓取、翻转、移栽作业,利用检测组件使抱夹和翻转依次进行,保证了翻转整个过程的稳定性,整个动作无需人工作业,使产线自动化程度、生产效率大大提高。
19、3、翻转电机和旋转气缸的配合,一方面能够更加节约电机的成本,另一方面也可以用旋转气缸辅助翻转电机完成对封头的翻转,更加稳定,同时配合感应片和探头能够准确的反馈封头的翻转角度,从而使封头翻转的角度更加到位。
技术特征:
1.一种封头抱夹翻转工装,包括作为安装载体的顶板(1),其特征在于:所述顶板(1)上对称安装有两个可相对滑动的夹臂机构(2),两个夹臂机构(2)相对的一侧上均安装有用于配合翻转封头的翻转机构(3);
2.根据权利要求1所述的一种封头抱夹翻转工装,其特征在于:所述驱动组件(22)包括水平固定在夹臂本体(21)上部的齿条(221),顶板(1)上转动安装有与两个齿条(221)啮合的齿轮(222),顶板(1)上固定有用于分别驱动两个夹臂本体(21)移动的两个第一驱动装置(223)。
3.根据权利要求1所述的一种封头抱夹翻转工装,其特征在于:所述夹爪组件(31)包括转动安装在夹臂本体(21)上的夹爪安装板(311),夹爪安装板(311)上安装有用于夹持封头的夹持件(312),两个夹持件(312)相对的一侧安装有缓冲块(313)。
4.根据权利要求1所述的一种封头抱夹翻转工装,其特征在于:所述转动装置(32)包括安装于其中一个夹臂本体(21)上用于驱动相对应的夹爪组件(31)转动的翻转电机(321),还包括安装于另一个夹臂本体(21)上用于驱动相对应的夹爪组件(31)转动的旋转气缸(322)。
5.根据权利要求1所述的一种封头抱夹翻转工装,其特征在于:所述检测组件(33)包括滑动安装在夹爪组件(31)之间夹持部位的接触件(331),接触件(331)远离另一个夹爪组件(31)的一端固定有感应块(332),接触件(331)与夹爪组件(31)之间安装有支撑弹簧(333),夹爪组件(31)上固定有用于探测感应块(332)位置的感应器(334)。
6.根据权利要求3所述的一种封头抱夹翻转工装,其特征在于:所述夹爪安装板(311)的转动轴上固定有感应片(23),夹臂本体(21)的侧壁上固定有用于探测感应片(23)转动角度的探头(24)。
7.根据权利要求1所述的一种封头抱夹翻转工装,其特征在于:地面上安装有用于固定顶板(1)的支撑机构(4);
技术总结
本技术涉及LNG气瓶生产技术领域,具体为一种封头抱夹翻转工装;通过第一驱动装置、齿条、齿轮、夹臂组件和夹爪组件的相互配合,可以保证左右夹臂组件抱夹动作的同步性,提高抱夹翻转封头过程的稳定性,再由夹爪组件上的检测机构检测封头夹紧到位,控制第一驱动装置锁紧,有效防止工装翻转过程中封头脱落,并完成对封头的翻转,从而节省人力,更好的实现生产自动化,本装置可以直接安装对接支撑机构,实现封头自动抓取、翻转、移栽作业,利用检测组件使抱夹和翻转依次进行,整个动作无需人工作业,使产线自动化程度、生产效率大大提高,解决了现有对LNG气瓶封头翻转和搬运的方式存在费时费力的问题。
技术研发人员:冯春阳,喻建军,刘菲菲
受保护的技术使用者:中机第一设计研究院有限公司
技术研发日:20230905
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!