一种全天候装船机的防碰撞方法、系统及电子设备
背景技术:
1、煤炭是主要的化石能源之一,被广泛用于电力、钢铁、建筑等行业。目前,为了满足市场需求,每天都有大量的货船在北方港口等待装载煤炭。然而,煤炭装船作业效率低下已成为制约煤炭运输行业发展的一个重要问题,这不仅会导致煤炭供应紧张,还会增加运输成本和环境污染。
2、对于煤炭装船作业来说,装船机作为其中的重要设备,一旦发生碰撞事故,就会对货物、人员以及设备造成严重的损失和影响。因此,如何提高装船机的防碰撞能力,在保障安全的前提下提升效率,成为了需要解决的问题。早期,对于装船机安全防护主要采用人工操作方式,但由于装船机作业频繁、复杂,人工操作容易出现疏漏,导致安全事故频发。为此,开始探索利用先进技术对装船机进行控制,提高其安全性。如今的装船机的防碰撞方法常用到的传感器包括摄像头、激光雷达等。对于海港的煤炭运输会出现的雾雨雪天气和作业过程中经常出现的扬尘情况,光学设备和激光雷达会因此受到限制,并不能精确、快速的实现装船机的碰撞检测,进而为装船机的工作过程带来安全隐患。
技术实现思路
1、为解决现有技术存在的上述问题,本发明提供了一种全天候装船机的防碰撞方法、系统及电子设备。
2、为实现上述目的,本发明提供了如下方案:
3、一种全天候装船机的防碰撞方法,包括:
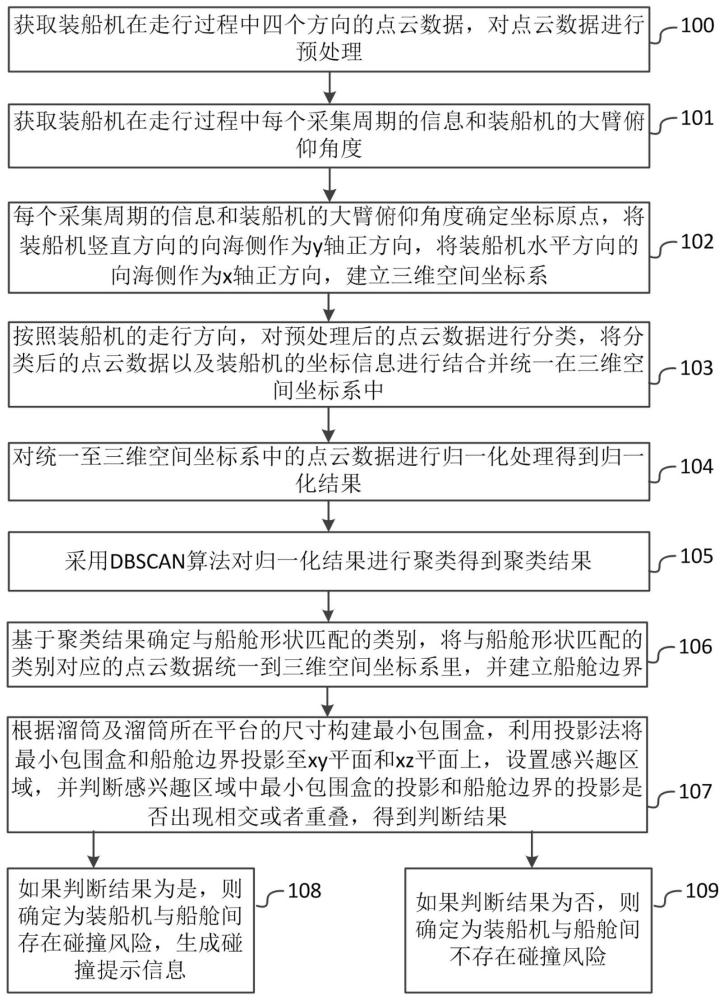
4、获取装船机在走行过程中四个方向的点云数据,对所述点云数据进行预处理;装船机在走行过程中四个方向的点云数据由毫米波雷达采集得到;
5、获取装船机在走行过程中每个采集周期的信息和装船机的大臂俯仰角度;每个采集周期的信息包括装船机初始位置的坐标信息和毫米波雷达所处的安装位置;
6、每个采集周期的信息和装船机的大臂俯仰角度确定坐标原点,将装船机竖直方向的向海侧作为y轴正方向,将装船机水平方向的向海侧作为x轴正方向,建立三维空间坐标系;
7、按照装船机的走行方向,对预处理后的点云数据进行分类,将分类后的点云数据以及装船机的坐标信息进行结合并统一在所述三维空间坐标系中;装船机的走行方向包括前后走行和左右走行;
8、对统一至所述三维空间坐标系中的点云数据进行归一化处理得到归一化结果;
9、采用dbscan算法对所述归一化结果进行聚类得到聚类结果;
10、基于所述聚类结果确定与船舱形状匹配的类别,将与船舱形状匹配的类别对应的点云数据统一到三维空间坐标系里,并建立船舱边界;
11、根据溜筒及溜筒所在平台的尺寸构建最小包围盒,利用投影法将所述最小包围盒和船舱边界投影至xy平面和xz平面上,设置感兴趣区域,并判断所述感兴趣区域中最小包围盒的投影和船舱边界的投影是否出现相交或者重叠,得到判断结果;
12、如果所述判断结果为是,则确定为装船机与船舱间存在碰撞风险,生成碰撞提示信息;
13、如果所述判断结果为否,则确定为装船机与船舱间不存在碰撞风险。
14、可选地,所述三维空间坐标系的原点为:(x0,y0*cos(β-90°),z0);其中,(x0,y0)为装船机初始位置的坐标信息,z0为毫米波雷达所处的安装位置,β为装船机的大臂俯仰角度。
15、可选地,按照装船机的走行方向,对预处理后的点云数据进行分类,将分类后的点云数据以及装船机的坐标信息进行结合并统一在所述三维空间坐标系中,具体包括:
16、按照装船机的走行方向,将预处理后的点云数据分为前后侧点云数据和左右侧点云数据;其中,前后侧点云数据采用装船机左右侧的毫米波雷达获取,左右侧点云数据采用装船机左右侧的毫米波雷达获取;
17、将前后侧点云数据从雷达坐标系下映射到三维空间坐标系中的yz平面;
18、将左右侧点云数据从雷达坐标系下映射到三维空间坐标系中的xz平面。
19、可选地,基于所述聚类结果确定与船舱形状匹配的类别,具体包括:
20、得到所述聚类结果后,确定前后侧点云数据每一个类别的平均y值和每一个类别的平均x值;
21、根据平均y值和平均x值确定与船舱每一侧对应的类别;
22、根据四个方向上毫米波雷达的安装位置分别给点云数据加上对应的标签值并统一在同一坐标系中;
23、采用dbscan算法分别对同一坐标系中y轴的点云数据和x轴的点云数据进行聚类后,再次选取与船舱形状匹配的类别。
24、可选地,所述预处理包括直通滤波和标准差滤波。
25、可选地,对所述点云数据进行预处理,包括:
26、确定窗口,并在所述窗口内,确定所述点云数据中x值的均值和y值的均值,并确定以及与x值对应的标准差和y值对应的标准差;
27、对于点云数据中的每一点,确定x值与x值的均值间的差值以及y值与y值的均值间的差值;
28、判断x值与x值的均值间的差值是否小于1倍的与x值对应的标准差,并判断y值与y值的均值间的差值是否小于1倍的与y值对应的标准差;
29、如果x值与x值的均值间的差值小于1倍的与x值对应的标准差,且y值与y值的均值间的差值小于1倍的与y值对应的标准差,则保留该点;
30、如果x值与x值的均值间的差值大于等于1倍的与x值对应的标准差,或y值与y值的均值间的差值大于等于1倍的与y值对应的标准差,则删除该点。
31、根据本发明提供的具体实施例,本发明公开了以下技术效果:
32、本发明通过采用毫米波雷达获取装船机的点云数据,并基于装船机的周期信息建立三维空间坐标系。通过坐标转换与坐标信息结合将点云数据统一在三维空间坐标系下。分别对点云数据进行归一化和聚类操作后,得到所需要的类别。将与船舱形状匹配的类别对应的点云数据统一到三维空间坐标系里,高效准确地确定船舱边界。根据溜筒及溜筒所在平台的尺寸构建最小包围盒,利用投影法将最小包围盒和船舱边界投影至xy平面和xz平面上,设置感兴趣区域,并通过判断感兴趣区域中最小包围盒的投影和船舱边界的投影是否出现相交或者重叠,快速、精确地达到检测防碰撞的目的。此外,使用毫米波雷达传感器作为检测设备,可以避免雾雨雪天气以及工业粉尘的影响,可以全天候地进行检测,具有很强的稳定性。
33、进一步,本发明提供了一种全天候装船机的防碰撞系统,所述系统用于实施上述提供的全天候装船机的防碰撞方法;所述系统包括:
34、点云数据获取模块,用于获取装船机在走行过程中四个方向的点云数据,对所述点云数据进行预处理;装船机在走行过程中四个方向的点云数据由毫米波雷达采集得到;
35、信息俯仰角获取模块,用于获取装船机在走行过程中每个采集周期的信息和装船机的大臂俯仰角度;每个采集周期的信息包括装船机初始位置的坐标信息和毫米波雷达所处的安装位置;
36、空间坐标系构建模块,用于每个采集周期的信息和装船机的大臂俯仰角度确定坐标原点,将装船机竖直方向的向海侧作为y轴正方向,将装船机水平方向的向海侧作为x轴正方向,建立三维空间坐标系;
37、点云数据映射模块,用于按照装船机的走行方向,对预处理后的点云数据进行分类,将分类后的点云数据以及装船机的坐标信息进行结合并统一在所述三维空间坐标系中;装船机的走行方向包括前后走行和左右走行;
38、点云数据归一化模块,用于对统一至所述三维空间坐标系中的点云数据进行归一化处理得到归一化结果;
39、聚类处理模块,用于采用dbscan算法对所述归一化结果进行聚类得到聚类结果;
40、船舱边界构建模块,用于基于所述聚类结果确定与船舱形状匹配的类别,将与船舱形状匹配的类别对应的点云数据统一到三维空间坐标系里,并建立船舱边界;
41、碰撞判断结果,用于根据溜筒及溜筒所在平台的尺寸构建最小包围盒,利用投影法将所述最小包围盒和船舱边界投影至xy平面和xz平面上,设置感兴趣区域,并判断所述感兴趣区域中最小包围盒的投影和船舱边界的投影是否出现相交或者重叠,得到判断结果;如果所述判断结果为是,则确定为装船机与船舱间存在碰撞风险,生成碰撞提示信息;如果所述判断结果为否,则确定为装船机与船舱间不存在碰撞风险。
42、再进一步,本发明还提供了一种电子设备,该电子设备包括:
43、存储器,用于存储计算机程序;
44、处理器,与所述存储器连接,用于调取并执行所述计算机程序,以实施上述提供的全天候装船机的防碰撞方法。
45、因本发明提供的上述系统和电子设备实现的技术效果与本发明提供的全天候装船机的防碰撞方法实现的技术效果相同,故在此不再进行赘述。
- 还没有人留言评论。精彩留言会获得点赞!