一种自动化管体注肩设备的制作方法
1.本技术涉及管体注肩设备的领域,尤其是涉及一种自动化管体注肩设备。
背景技术:
2.目前,牙膏管、化妆品管、药管等产品在制造时,多采用分段式的制造方法,先将管体制成,然后在管体的头部注胶,待胶体冷凝后,管体的肩部成型。随着自动化设备的快速发展,自动化注肩机已大量应用于牙膏管、化妆品管等软管的注肩生产。注肩机是指用于将管体的一端注胶成型,使得管体的一端形成肩部,这个过程也称为管体注肩。
3.在进行管体的注肩作业前,各组管体进行预制,各组管体散落在箱体内部,车间人员在进行注肩作业时,将箱体转运至注肩工位,现有的注肩机需要车间人员将各组待进行注肩作业的管体逐一安装在注肩模具内部,各组管体安装完毕后,操控注肩机将熔融状态的胶体向各组管体的上端部位置进行输送,注肩模具内部的胶体经冷凝成型,各组管体的上端部形成肩部,之后进行注肩模具的开模,车间人员再逐一将各组完成注肩作业的管体取下,不断重复循环上述过程,完成对各组管体的注肩作业。
4.针对上述中的相关技术,发明人认为存在有如下的缺陷:进行管体的注肩作业时,各组管体的数量大,车间人员在进行管体的注肩作业时,需要不断对各组管体向注肩模具内部的安装及卸载,管体在模具内部完成注肩作业后,车间人员将各组管体从模具内部取出,管体的肩部散发出刺鼻的气味,使车间人员的健康存在潜在的威胁,故存在改进的空间。
技术实现要素:
5.为了提升在管体注肩过程中对车间人员的健康保护,本技术提供一种自动化管体注肩设备。
6.本技术提供的一种自动化管体注肩设备采用如下的技术方案:
7.一种自动化管体注肩设备,包括输送装置及注肩装置,所述输送装置包括辊床、位于所述辊床末端的用于将管件从所述辊床上卸载的抓取组件、推送组件及卸料组件;所述注肩装置包括外周面固定有若干组杆子的轴体及位于所述轴体竖直上方的模具,所述推送组件将各组管体插接入各组所述杆子上,所述轴体转动使插接有管体的杆子插接入所述模具内部,所述模具内部不断输送熔融状的胶体,胶体向所述模具内部填充,完成各组管体的注肩作业后,所述模具开模并驱动所述轴体转动,所述卸料组件将完成注肩的各组管体从各组所述杆子上进行卸载。
8.通过采用上述技术方案,各组管体被放置在输送装置中的辊床上,辊床不断转动,将各组管体向抓取组件的位置进行输送,抓取组件将辊床上的各组管体进行抓取,各组管件被放置在卸料组件上,卸料组件开始运动,将各组管体推入轴体上的各组杆子上,轴体不断转动,使各组插接有管体的杆子插接入模具内部,模具内部不断输送熔融态的胶体,胶体在模具内部不断填充,完成对管体上端部的注肩作业,完成管体的注肩作业后,模具开模,
轴体转动,使完成注肩作业的各组管体转动至卸料组件的一侧,同时下一组待进行注肩作业的管体进入模具内部,卸料组件将各组完成注肩作业的管体从杆子上进行卸载,完成管体的全部注肩作业过程,上述配合实现了管体注肩过程的全程自动化进行,管体完成注肩作业后不再需要通过人力进行管体的卸载,降低了潜在的车间人员的健康威胁,提升在管体注肩过程中对车间人员的健康保护。
9.优选的,还包括上料装置、换向装置,所述上料装置包括用于盛装各组管体的箱体及安装在箱内的用于抬升各组管体的升举组件,所述换向装置包括桌体、安装在所述桌体上的输送组件及吊装组件,经所述升举组件抬升的各组管体不断向所述输送组件进行输送,所述吊装组件对所述输送组件上的管体进行抓取,所述输送组件上安装有检测管体上端部的二维码的相机,所述吊装组件与所述相机信号连接,所述吊装组件将完成换向的各组管体放置在所述输送装置上。
10.通过采用上述技术方案,该种注肩设备包括上料装置、换向装置,进行注肩作业前,车间人员将各组待进行注肩作业的管体向箱体内部倾倒,各组管体上预印有二维码,各组管体经箱体内部的升举组件抬升,各组管体再经输送组件的运输,管体逐一向前运动,在输送组件的位置上,相机对管体上的二维码进行获取,当未获取到二维码的信息时,说明抬升的管体的方向错位,相机与吊装组件信号连接,吊装组件转动,使错位的管体转动180
°
,使管体的方向被调正,管体在吊装组件位置完成方向调整。
11.优选的,所述箱体的箱底安装有剪叉结构的升降台,所述升举组件包括呈曲柄摇杆结构的推板及第一输送带,所述推板不断将所述箱体内部的各组管体向所述第一输送带上进行推动,所述箱体靠近所述换向装置的一侧开口设置,所述第一输送带穿过开口并向所述输送组件的位置延伸。
12.通过采用上述技术方案,各组待进行注肩作业的管体倾倒入箱体内部,管体的方向杂乱无序,升降台将各组管体在竖直方向上进行抬升,各组管体在曲柄摇杆结构的推板作用下,各组管体不断运动至第一输送带上,随着第一输送带的转动,各组管体从箱体上的开口进入输送组件的位置,实现了管体从箱体向输送组件的运动。
13.优选的,所述输送组件包括第二输送带及平行于所述第二输送带的延伸方向分布的两组输送槽,两组所述输送槽之间安装有上端面与所述第一输送带共面的分流座,所述第二输送带上安装有朝向所述分流座的第一气缸,所述第一气缸的推杆上固定有推动各组管体向两侧的所述输送槽滑落的立板。
14.通过采用上述技术方案,输送组件中的第二输送带不断转动,各组管体从箱体输出后位于分流座上,第一气缸的推杆上安装有朝向分流座的立板,第一气缸上电后做往复直线式运动,当第一气缸伸出时,分流座上的管体散落在远离第一气缸的一组输送槽内部,同时管体持续向分流座上输送,当第一气缸收缩时,立板与分流座上的管体接触,使管体滑落入靠近第一气缸的一侧输送槽内部,上述配合实现了将管体向各组输送槽内部的装载,提升了管体在第二输送带上的运输效率。
15.优选的,所述桌体的上端面竖直架设有机架,所述吊装组件安装在所述机架上并朝向所述换向装置的一侧,所述吊装组件沿着所述机架水平滑动,所述吊装组件包括连接板及竖直安装在所述连接板下端面的均为两组的第一抓取及第二抓取,所述第二抓取的上端部同轴转动有微转电机,所述第一抓取位于所述输送槽的竖直上方。
16.通过采用上述技术方案,机架竖直架设在桌体上,吊装组件用于将输送槽内部的各组管体向下一输送装置的工位进行转运,吊装组件中的连接板对第一抓取及第二抓取进行连接,使第一抓取及第二抓取实现联动,第一抓取将输送槽内部的管体向检测二维码的工位进行输送,第二抓取将完成方向调整的各组管体向下一工位进行输送,实现第一抓取及第二抓取的联动,进而使换向装置的整体运转效率提升。
17.优选的,所述第二输送带背离所述箱体的一侧安装有检测板,所述检测板上凹设有两组位于各组所述输送槽延伸方向上的方槽,各组所述方槽内部均转动连接有两组相向转动的辊子,各组管体与两组所述辊子转动连接,所述第二抓取位于所述方槽的竖直上方,所述相机固定在所述检测板远离所述第二输送带的一侧,所述相机朝向所述方槽并实时获取二维码的信息。
18.通过采用上述技术方案,检测板上端面凹设两组方槽,各组方槽内部转动连接两组相向转动的辊子,当第一抓取将输送槽上的管体放置在各组方槽内部时,各组管体的外周面与两组辊子转动连接,两组辊子使管体不断转动,使管体上端部的二维码能够持续转动,相机能够快速准确的获取二维码的信息,进而使换向装置对各组管体的方向调整更加快捷,降低了因相机为准确获取二维码而致使管体方向调整被遗漏等情况的发生。
19.优选的,所述桌体的背面安装有支座,所述抓取组件包括竖直架设在所述支座上端面的支架,两组所述支架的上端面架设有水平设置的线性电机,所述线性电机与所述辊床的延伸方向相同,所述线性电机的端部固定有竖直延伸的第三气缸,所述第三气缸的竖直下端固定有水平设置的横杆,所述横杆的下端部等间距安装有若干组吸附头。
20.通过采用上述技术方案,支座安装在桌体的背面,抓取组件中的支架安装在支座上端面,当辊床上运输的各组管体进行卸载时,线性电机上电运动,线性电机的端部竖直固定有第三气缸,第三气缸的竖直下端固定有水平设置的横杆,当进行管体的卸载时,线性电机靠近辊床的末端,第三气缸竖直向下运动并与各组管体接触,各组吸附头对各组管体进行抓取,完成管体的固定后,线性电机反向运动,第三气缸竖直向下运动,完成对辊床上各组管体的卸载作业,省去了车间人员的参与,提升了劳动效率。
21.优选的,所述卸料组件位于所述轴体背离所述推送组件的一侧,所述卸料组件包括两组竖直设置在所述支座上端面的架子及第五气缸,所述第五气缸朝向所述轴体的一侧,所述第五气缸的推杆上固定有用于装夹各组完成注肩作业的管体的夹紧组件,所述夹紧组件包括朝向所述轴体的基体及位于所述基体上端面的第六气缸,所述基体朝向所述轴体的竖直端面上凹设有若干组与各组所述杆子正对的插孔,所述基体的上端面凹设有与各组所述插孔连通的方口,各组所述插孔内部插接滑动有夹紧板,所述夹紧板的上端面伸出所述方口并与所述第六气缸的推杆固定连接。
22.通过采用上述技术方案,当各组管体在模具内部完成注肩作业后,轴体转动至卸料组件的一侧,此时下料组件中的第五气缸向轴体的一侧运动,第五气缸的推杆上固定有基体,基体向各组杆子的一侧运动,各组管体插接入基体上的插孔内部,第六气缸安装在基体的上端面,第六气缸的推杆与各组插孔内部的夹紧板伸出方口的一端固定连接,当各组管体插接入插孔内部后,第六气缸上电运动,使各组插孔内部的夹紧板对各组管体进行夹紧,完成对管体的夹紧后,第五气缸的推杆向缸体内部收缩,使基体向远离各组杆子的一侧运动,进而使各组管体与管子脱离,完成对各组管体的卸载,整个过程无需人力参与,提升
了各组管体从杆子上的卸载效率。
23.综上所述,本技术包括以下至少一种有益技术效果:
24.1.箱体内部的各组管体经升举组件不断被抬升,将第一输送带的输送,各组管体在换向装置的位置完成方向的调整,随着第一抓取及第二抓取的操作,各组管体转移至不断转动的辊床上,各组管体卡接在各组卡槽的槽口内部,随着管体的运动,各组运动至抓取组件的位置,各组管体经抓取组件及推动组件的作业,各组管体插接在轴体外周面上的各组杆子上,随着轴体的转动,杆子上的各组管体进入模具内部,模具内部输送熔融状的胶体,胶体不断对模具部内部进行填充,胶体冷凝后形成管体的肩部,最后经卸料组件的作用,各组完成注肩作业的管体从杆子上实现卸载,完成对管体的全部注肩作业过程,上述配合实现了管体注肩过程的全程自动化进行,解放了车间人员的劳动,管体注肩作业过程的效率高,各工位之间协调配合,提升了企业的经济效益;
25.2.检测板上端面凹设两组方槽,各组方槽内部转动连接两组相向转动的辊子,当第一抓取将输送槽上的管体放置在各组方槽内部时,各组管体的外周面与两组辊子转动连接,两组辊子使管体不断转动,使管体上端部的二维码能够持续转动,相机能够快速准确的获取二维码的信息,进而使换向装置对各组管体的方向调整更加快捷,降低了因相机为准确获取二维码而致使管体方向调整被遗漏等情况的发生。
附图说明
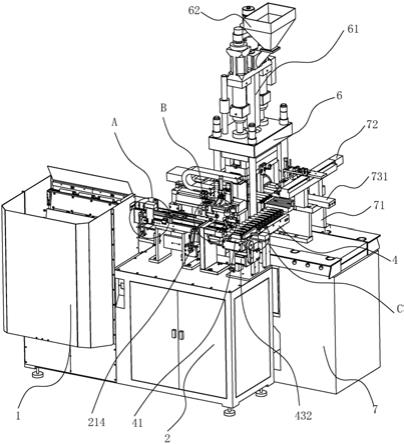
26.图1是本技术实施例的整体结构示意图;
27.图2是本技术中箱体的半剖示意图;
28.图3是图1中a处的放大图;
29.图4是图1中b处的放大图;
30.图5是图1中c处的放大图;
31.图6是本技术实施例的另一视角的整体结构示意图;
32.图7是图6中d处的放大图;
33.图8是图6中e处的放大图。
34.附图标记说明:1、箱体;11、升降台;12、推板;13、第一输送带;131、第一电机;132、辊子;2、桌体;21、第二输送带;211、输送槽;212、分流座;213、检测板;2131、方槽;2132、相机;2133、第三电机;214、第二电机;22、第一气缸;221、立板;222、l型件;23、机架;2311、连接板;2312、滑槽;2313、板组;2314、紧固螺栓;232、第一抓取;233、第二抓取;2331、微转电机;2332、圆孔;2333、螺纹孔;2334、螺钉;3、管体;31、二维码;4、辊床;41、第三输送带;411、卡槽;4111、槽口;412、支撑板;43、第二气缸;431、板子;432、第四电机;5、轴体;51、杆子;6、模具;61、注胶装置;62、进胶口;7、支座;71、支架;72、线性电机;721、第三气缸;7211、横杆;7212、吸附头;73、板床;731、第四气缸;732、凹槽;8、架子;81、第五气缸;82、基体;821、插孔;822、方口;823、夹紧板;83、第六气缸;9、开关。
具体实施方式
35.以下结合附图1
‑
8对本技术作进一步详细说明。
36.本技术实施例公开一种自动化管体注肩设备。参照图1及图2,包括上料装置、换向
装置、输送装置及注肩装置,上料装置包括上端开口设置的箱体1及安装在箱内的升举组件,箱体1的箱底一侧安装有呈剪叉结构的推板12,升举组件包括由曲柄滑块机构驱动的升降台11及第一输送带13,第一输送带13位于升降台11的竖直上方,升降台11向第一输送带13的一侧倾斜设置。
37.箱体1内部倾倒若干在待进行注肩作业的管体3,管体3经升降台11的抬升,各组管体3逐一被放置在第一输送带13上,第一输送带13的宽度一次只能容纳一组管体3,第一输送带13上的各组管体3首尾正对的分布在第一输送带13上。
38.参照图1及图3,换向装置包括呈长方体的桌体2、安装在所述桌体2上的输送组件及吊装组件,桌体2安装在有与箱体1的一侧并与箱体1一体拼接,升举组件抬升的各组管体3不断经输送组件进行输送,箱体1靠近桌体2的一侧开口设置,输送组件包括第二输送带21及平行于第二输送带21的延伸方向分布的两组输送槽211,第一输送带13穿过开口并向第二输送带21的一侧延伸,第二输送带21的竖直下方固定有通过带传动实现第一输送带13转动的第一电机131。第二输送带21的一侧竖直架设有l型件222,l型件222的上端面固定有水平设置的第一气缸22,第一气缸22朝向第二输送带21且第一气缸22的推杆的延伸方向垂直于第二输送带21的延伸方向;第二输送带21宽度方向的中间位置安装有分流座212,分流座212与第一输送带13的延伸方向同向设置,分流座212的上端面与第一输送带13的所在平面共面,第一输送带13上输送的各组管体3移动至分流座212的上端面;第一气缸22的推杆的端部固定有朝向分流座212的立板221,分流座212的两侧设置有两组输送槽211,各组输送槽211的宽度不小于管体3的管径。第二输送带21的下端位置在远离第一电机131的位置固定有第二电机214,第二电机214通过带传动的方式驱动第二输送带21转动。
39.第一气缸22做往复直线运动,当推杆伸出缸体时,立板221将分流座212上的管体3推入远离第一气缸22一侧的输送槽211内部;当推杆向缸体内部受收缩时,立板221将分流座212上的管体3推入靠近第一气缸22一侧的输送槽211内部。落入各组输送槽211内部的管体3随着第二输送带21的运动不断向前输送。
40.参照图1及图4,桌体2的上端面竖直架设有机架23,机架23的上端面水平设置,吊装组件安装在机架23上并朝向换向装置的一侧,吊装组件沿着机架23的上端面水平滑动,吊装组件包括连接板2311及竖直安装在连接板2311下端面的、均为两组的第一抓取232及第二抓取233。
41.连接板2311靠近输送槽211的一侧贯通开设有两组滑槽2312,两组滑槽2312的延伸方向平行于第二输送带21的延伸方向,连接板2311靠近输送槽211的一端的下端面安装有板组2313,各组滑槽2312内部插接有与板组2313螺纹连接的紧固螺栓2314。各组第一抓取232位于各组输送槽211的竖直上方,各组第一抓取232分别与板组2313的下端面固定连接,各组第一抓取232竖直设置,各组第一抓取232的下端部固定有两组吸附头7212,各组吸附头7212与管体3的外周面吸附固定。各组第二抓取233位于连接板2311远离第二输送带21的一端,各组第二抓取233的上端部同轴转动有微转电机2331,第一抓取232、第二抓取233及输送槽211共面设置,第一抓取232的下端部固定有两组吸附头7212,各组吸附头7212与管体3的外周面吸附固定。
42.第二输送带21背离箱体1的一侧安装有所在平面水平设置的支撑板412,支撑板412的上端面竖直凹设有两组方槽2131,各组方槽2131的延伸方向与各组输送槽211的延伸
方向同向,各组方槽2131内部转动连接有两组辊子132,支撑板412的下端面安装有驱动各组辊子132转动的第三电机2133,各组方槽2131内部的两组辊子132相向转动,第一抓取232将输送槽211内部的各组管体3向方槽2131内部移动,各组管体3在预制时在其前端预印二维码31,连接板2311远离第二输送带21的上端面安装有两组能够检测二维码31信息的相机2132,各组相机2132朝向方槽2131内部,各组相机2132与微转电机2331信号连接,当相机2132未获取到二维码31的信息时,相机2132竖直上方的微转电机2331转动180
°
,使各组管体3的方向得到调正。
43.各组第二抓取233的上端面凹设有竖直延伸的圆孔2332,第二抓取233的一侧端面上凹设有与圆孔2332连通的螺纹孔2333,各组微转电机2331的输出轴与圆孔2332插接滑动,螺纹孔2333内部螺纹连接有螺钉2334,螺钉2334的攻入端与微转电机2331的输出轴抵紧。连接板2311在机架23上端面做间歇往复式滑动,使第二输送带21上的各组管体3转移至支撑板412上,同时支撑板412上的各组管体3在第二抓取233的作用下不断向输送装置的工位移动。
44.参照图1及图4,输送装置包括辊床4、位于辊床4末端的用于将管件从辊床4上卸载的抓取组件、推送组件及卸料组件。辊床4水平设置,辊床4的延伸方向垂直于二代的延伸方向。辊床4上转动连接有第三输送带41,辊床4的下端面固定有第四电机432,第四电机432通过带传动的方式驱动第三输送带41转动。第三输送带41的外周面上等间距分布有若干组卡槽411,各组卡槽411背离第三输送带41的一侧端面上凹设有延伸方向垂直于第三输送带41转动方向的槽口4111。
45.辊床4与换向装置正对的位置上安装有对齐组件,对齐组件包括所在平面水平设置的支撑板412及安装在支撑板412上端面的第二气缸43,支撑板412固定在辊床4一侧的竖直端面上,第二气缸43的推杆朝向第三输送带41且第二气缸43的延伸方向垂直于第三输送带41的延伸方向,第二气缸43的推杆远离缸体的一端固定有朝向各组卡槽411的板子431,板子431的所在平面垂直于各组卡槽411的延伸方向,第二气缸43的推杆驱动板子431与卡槽411的端部抵接。对齐组件将第三输送带41上的各组管体3进行对齐,使各组管体3的排列较为规整。
46.参照图6及图7,桌体2的背面安装有呈长方体的支座7,抓取组件包括竖直架设在支座7上端面的支架71,两组支架71的上端面架设有水平设置的线性电机72,线性电机72与辊床4的延伸方向相同,线性电机72的端部固定有竖直延伸的第三气缸721,第三气缸721的竖直下端固定有水平设置的横杆7211,横杆7211的下端部等间距安装有若干组吸附头7212,各组吸附头7212之间的间距与第三输送带41上的相邻两组卡槽411之间的距离相同。
47.注肩装置包括包括外周面固定有若干组杆子51的轴体5及位于所述轴体5竖直上方的模具6。轴体5的外周面上沿轴向固定有若干组杆子51,同一竖直截面共四组杆子51,各组杆子51绕轴体5的轴线等角度圆周分布,推送组件安装在两组支座7上,推送组件位于抓取组件的竖直下方,推送组件包括呈长方形的板床73及第四气缸731,板床73水平设置,板床73的上端面凹设有若干组相互平行设置的凹槽732,各组凹槽732均朝向轴体5上的杆子51,相邻两组凹槽732之间的间距与第三输送带41上的相邻两组卡槽411之间的距离相同。
48.推送组件中的第四气缸731将各组管体3插接入各组杆子51上,模具6的竖直上端安装有注肩装置,注胶装置61上安装有开口朝上设置的进胶口62。轴体5转动使插接有管体
3的杆子51插接入模具6内部,模具6内部不断输送熔融状的胶体,胶体向模具6内部填充,完成各组管体3的注肩作业后,模具6开模并驱动轴体5转动,使各组完成注肩作业的管体3转动至模具6背离推送组件的一侧。远离第三输送带41的一组支架71上安装有控制该设备的开关9。
49.参照图6及图8,卸料组件将完成注肩的各组管体3从各组杆子51上进行卸载。卸料组件位于轴体5背离推送组件的一侧,卸料组件包括两组竖直设置在支座7上端面的架子8及固定在架子8上端面的第五气缸81,第五气缸81朝向轴体5的一侧,第五气缸81的推杆上固定有用于装夹各组完成注肩作业的管体3的夹紧组件,夹紧组件包括朝向轴体5的基体82及位于基体82上端面的第六气缸83,基体82朝向轴体5的竖直端面上凹设有若干组与各组杆子51正对的插孔821,基体82的上端面凹设有与各组插孔821连通的方口822,各组插孔821内部插接滑动有夹紧板823,夹紧板823的上端面伸出方口822并与第六气缸83的推杆固定连接。
50.本技术实施例的一种自动化管体注肩设备的实施原理为:
51.进行注肩作业前,启动开关9,各组电机及第二气缸43上电运动。在进行管体3的注肩作业时,车间人员将各组待进行注肩作业的管体3倾倒入箱体1内部,各组管体3经推板12及升降台11的作用,不断向第一输送带13上转移,随着第一输送带13的输送,在第一气缸22的作用下,立板221将各组管体3向输送槽211内部推动,各组管体3随着第二输送带21的输送,不断向支撑板412的位置移动,此时存在部分管体3的方向不正。
52.在吊装组件的作用下,连接板2311上的第一抓取232与第二抓取233对各组管体3进行抓取,使输送槽211内部的各组管体3不断向支撑板412上方槽2131位置移动,同时第二抓取233将各组管体3从方槽2131位置向辊床4上进行输送,输送的同时完成对管体3方向的调正,对齐组件将各组管体3进行对齐,提升了各组管体3的规整性。
53.随着辊床4的运动,各组管体3运动至抓取组件的位置,线性电机72向辊床4的一侧移动,第三气缸721驱动推杆向下运动,各组吸附头7212对管体3进行吸附、移动,各组管体3转移至板床73上,在第四气缸731的推动下,各组管体3与轴体5上的各组杆子51插接配合。
54.之后轴体5转动,使各组杆子51插接入模具6内部,注胶装置61的进胶口62不断输送胶体,胶体向模具6内部填充,使胶体在模具6内部填充、冷凝成型,胶体在管体3的上端部形成肩部,最后模具6开模,轴体5进一步转动至朝向卸料组件的一侧,第五气缸81的推杆运动,使各组管体3插接入基体82上的各组插孔821内部,在第六气缸83的作用下,夹紧板823对各组管体3进行夹紧,第五气缸81收缩,使各组管体3从杆子51上脱离,最后第六气缸83复位,使夹紧板823不再对管体3夹紧,各组管体3能够顺利从卸料组件上掉落,完成对各组管体3的全部注肩作业过程。
55.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1