口腔修复体3D打印方法及装置
口腔修复体3d打印方法及装置
技术领域
1.本发明涉及3d打印技术领域,更具体的说是涉及一种口腔修复体3d打印方法及装置。
背景技术:
2.口腔修复学是研究用符合口腔生理和生物力学的方法修复口腔内及颌面部各种缺损的一门学科,是口腔医学的重要分支和组成部分。口腔修复学的内容包括研究牙体牙列缺损、牙列缺失及口腔颌面缺损发生的原因、临床表现、诊断、治疗方法和预防,合理地设计制作各种修复体,使之恢复和改善患者的口腔功能和形态,以保障患者口腔器官及全身的健康。在制作修复体时采用打印等相关技术,但现有的高精度打印技术存在一些问题;例如为了保证精度,常见的方法包括支撑优化、调整零件摆放角度和姿态、分多区域扫描、光斑补偿、轮廓偏置、z轴补偿、调整热处理工艺以减少残余应力等,但是在实践中,分多区域扫描的方法会导致数据量急剧增大并且后处理工作增加,打印效率降低;因此,在保持打印精度的提高打印效率是本领域技术人员亟需解决的问题。
技术实现要素:
3.有鉴于此,本发明提供了一种口腔修复体3d打印方法及装置,在保持打印精度的提高打印效率。
4.为了实现上述目的,本发明提供如下技术方案:
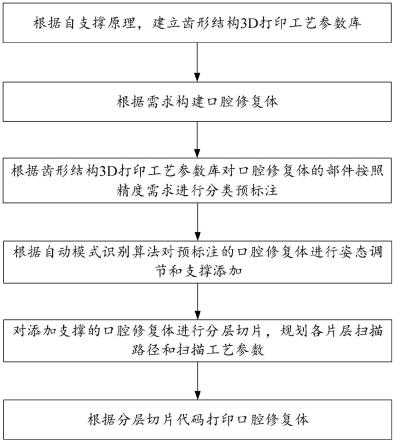
5.一种口腔修复体3d打印方法,具体步骤为:
6.根据自支撑原理,建立齿形结构3d打印工艺参数库;
7.根据需求构建口腔修复体;
8.根据齿形结构3d打印工艺参数库对口腔修复体的部件按照精度需求进行分类预标注;
9.根据自动模式识别算法对预标注的口腔修复体进行姿态调节和支撑添加;
10.对添加支撑的口腔修复体进行分层切片,规划各片层扫描路径和扫描工艺参数;
11.根据分层切片代码打印口腔修复体。
12.可选的,构建口腔修复体的步骤为:
13.采集口腔信息;
14.根据口腔信息在cad中构建口腔修复体。
15.可选的,姿态调节包括三角面片角度和摆放角度的计算。
16.可选的,三角面片角度的计算步骤具体为:
17.以口腔修复体中心为原点建立局部坐标系;
18.根据局部三角面片的顶点坐标获得局部三角面片的法向量;
19.根据局部角面片法向量获得局部三角面片角度θi。
20.进一步可具体为:以三维口腔修复体中心为原点建立局部坐标系,该局部坐标系
的x轴、y轴、z轴与全局坐标系的x轴、y轴、z轴平行,三角面片三个顶点坐标为ai=(x
i1
,y
i1
,z
i1
),bi=(x
i2
,y
i2
,z
i2
),ci=(x
i3
,y
i3
,z
i3
),三角面片角度为三角面片法向量ni=(xi,yi,zi)与z轴负方向的夹角与z轴负方向的夹角
21.可选的,口腔修复体的部件摆放角度的获取步骤为:
22.根据局部三角面片的顶点坐标以及绕局部坐标系的旋转角度,获得旋转后关键局部三角面片顶点坐标;
23.根据局部三角面片的法向量以及绕局部坐标系的旋转角度,获得旋转后关键局部区域三角面片的法向量;
24.根据绕局部坐标系的旋转角度以及旋转后关键局部区域三角面片的法向量获得旋转后关键局部区域三角面片角度;
25.利用优化算法求解,得到口腔修复体的部件的最佳摆放角度。
26.进一步可具体为:摆放角度为三维口腔修复体绕局部坐标系x轴的旋转角度α、绕y轴的旋转角度β,三维口腔修复体旋转后关键局部区域三角面片法向量变为n'i(α,β),三个顶点坐标变为a'i(α,β),b'i(α,β),c'i(α,β),计算公式如下:n'i(α,β)=n
irx
(α)ry(β);
27.a
′i(α,β)=a
irx
(α)ry(β);
28.b
′i(α,β)=b
irx
(α)ry(β);
29.c
′i(α,β)=c
irx
(α)ry(β);
30.其中,
[0031][0032][0033]
旋转后关键局部区域三角面片法向量与z轴负方向的夹角为旋转后关键局部区域三角面片法向量与z轴负方向的夹角为三个顶点坐标为a'i(α,β)=(x'
i1
,y'
i1
,z'
i1
),b'i(α,β)=(x'
i2
,y'
i2
,z'
i2
),c
′i(α,β)=(x
′
i3
,y
′
i3
,z
′
i3
);
[0034]
式中,α为口腔修复体绕局部坐标系x轴的旋转角度;β为口腔修复体绕局部坐标系y轴的旋转角度;ni为三角面片法向量;n'i(α,β)为口腔修复体绕局部坐标系旋转后三角面片法向量;a'i(α,β)、b'i(α,β)、c'i(α,β)为口腔修复体绕局部坐标系旋转后局部区域三角面片三个顶点坐标;r
x
(α)为口腔修复体绕局部坐标系x轴的旋转后的坐标矩阵;ry(β)为口腔修复体绕局部坐标系y轴的旋转后的坐标矩阵。
[0035]
利用优化算法求解,得到三维口腔修复体的部件的最佳摆放角度。
[0036]
可选的,优化算法的优化条件为:
[0037]
1)旋转后局部区域三角面片角度θ'1,
…
,θ'n平均值最小,即
[0038]
2)旋转后局部区域三角面片角度θ'i,
…
,θ'n小于悬垂角度阈值θ的数量最大,即其中
[0039][0040]
3)口腔修复体的局部区域三角面片在打印平面投影面积最小,即其中
[0041][0042]
摆放角度为三维口腔修复体绕局部坐标系x轴的旋转角度α、绕y轴的旋转角度β,利用优化算法求解,得到三维口腔修复体的部件的摆放角度。
[0043]
可选的,悬垂角度阈值θ为口腔修复体的部件表面与成形平台xy平面法向最大无支撑成型的角度,由粉末材料特性、3d打印机能力和打印工艺共同决定。
[0044]
可选的,支撑添加的步骤为:
[0045]
获取口腔修复体的部件的分类预标注;
[0046]
根据悬垂角度添加通用支撑;
[0047]
根据口腔修复体的部件的特征添加增强支撑。
[0048]
可选的,在支撑添加中支撑接触点为应力中断结构。
[0049]
可选的,扫描策略为先成型切片轮廓、后成型内部填充区域。
[0050]
一种口腔修复体3d打印装置,包括:
[0051]
数据采集装置:获取口腔修复体的历史数据以及待制作的口腔修复体的信息;
[0052]
口腔修复体构建装置:根据待制作的口腔修复体的信息建立待制作的口腔修复体;
[0053]
数据处理装置:根据口腔修复体的历史数据构建数据库;依据数据库对口腔修复体进行分类预标注以及局部优化;对分类标注以及局部优化的口腔修复体的部件进行分层切片,规划各片层扫描路径和扫描工艺参数;
[0054]
打印装置:根据分层切片代码打印口腔修复体。
[0055]
经由上述的技术方案可知,与现有技术相比,本发明公开提供了一种口腔修复体3d打印方法及装置,适于各种复杂形态制件的批量打印,可有效提高关键局部的打印精度,并减少支撑的数量、质量和长度,节约打印材料并提高打印效率。
附图说明
[0056]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本
发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
[0057]
图1为本发明的方法流程示意图;
[0058]
图2为本发明的结构示意图;
[0059]
图3为本发明实施例2的结构示意图。
具体实施方式
[0060]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0061]
仿生义齿是工程科学、材料科学与生命科学交叉融合的前沿方向,其内涵为:基于人工合成材料设计制造义齿,其功能形态、结构和性能与缺损/缺失的天然牙齿相契合。截至目前,义齿(也称为“口腔修复体”)是天然牙齿缺损或缺失后的最主要治疗方式。天然牙齿具有典型的各向异性多层梯度结构,历经数千年的迭代进化,其宏观形状和空间姿态高度个性化、微观组织结构高度功能化、综合机械性能与口颌系统和谐匹配。人工智能、3d打印和仿生材料技术的蓬勃发展,有潜力实现个性化仿生义齿的“高效、精准、智能”设计制造,而揭示复杂自由结构虚实转换过程中多源生物信息的充要提取、有效传递与仿生调控机制,是义齿仿生设计制造技术创新的关键。
[0062]
实施例1
[0063]
本发明实施例公开了一种口腔修复体3d打印方法及装置,针对冠、桥、可摘局部义齿支架等齿形结构独特的几何形状,根据特定角度重力悬垂面逐点成形的自支撑原理,建立了齿形结构3d打印专用工艺参数库,使打印的齿形结构在具有较高的强度、较大的韧性的同时,具有较高的精度和较小的表面粗糙度;然后基础上建立了分类与模式识别算法,对精度需求不同的区域进行分类预标注,并生成差异化的智能自适应打印工艺;实现了总体与关键局部精度的差异化成形,将修复体关键局部打印精度提升2倍。本技术中采用分布构造牙科修复体的部件,对部件的每个面片标记部件属性,部件融合过程,部件的标记属性不变。
[0064]
首先建立了自动分类算法,自动分类标记高、低两种不同精度需求区域(例如肩台外缘线、卡环精度要求高,而义齿基托固位网精度要求低)。建立自动模式识别算法,针对常见口腔修复体如全冠、固定桥和可摘局部义齿等,可自动识别应用功能部件,调整适当的姿态,让高精度需求表面避免添加支撑,实现精度最优化;对于精度需求高且复杂的曲面添加智能支撑,包括根据表面的悬垂角度自动添加通用支撑,薄弱、易变形区域添加增强支撑,将支撑接触点设计为应力中断结构提高后期去除效率,通过将面线/网状空心支撑与实体支撑自动混合,在发挥支撑的打印支持和散热作用的同时,减小重力和应力变形等。最终,实现了总体打印精度持平、但关键局部打印精度优于国际同类水平的关键突破。该策略首次实现了以设计为引导、精度为驱动、打印姿态与支撑为主要变量的局部精度最优、整体打印精度适宜的高效3d打印技术,具有极高的工程实践与应用价值。
[0065]
各个部件的精度要求有差异。例如卡环,精度要求高。例如义齿基托固位网,精度
要求低。根据复杂修复体的部件精度要求属性,利用专家的长期工艺测试经验,建立了专家数据库,智能生成局部精度最优解方案,涵盖支撑的优化、摆放姿态的优化、以及工艺参数的优化。
[0066]
具体为:在口腔修复过程中发现增材制造复杂多变凹凸型面制件的悬垂面自支撑现象,在小于悬垂角度阈值θ时上游层已成形结构可对下游层待成形结构实现“层间界面全支撑”。因此在超悬垂角度阈值打印时,不同材料在特定气氛或原材料环境中“成形误差”的可预知、可编程属性,可用于“微纳粗糙界面”(例如多材料粘接面)、“超分辨率结构”(例如桁架直径小于喷头直径的发丝样生物支架)等难成形特殊表面/结构的控形控性成形。基于此,本实施例提出了“全局支撑”批量打印的理念,基于特殊摆放姿态,多个独立制件之间的不同凸凹结构,可呈现“交互支撑”效应,抵抗重力作用的同时,比额外添加的易去除支撑具有更优良的消除打印进程“内应力”和抵御后处理进程“应力致形变”的能力。
[0067]
受细胞和组织器官之间的因果关系,“仿生生物体生长发育”的增材成形理念,即在逐点增材成形过程中,光形晶胞(单光斑成形的最小单元,零维)在成形线(一维)、面(二维)和体(三维)结构过程中的堆叠与熔合行为,初步揭示了晶胞多维堆叠模式对构件精度、效率、表面形貌、力学属性等综合性能的影响规律。提出了个性自由结构制件不同宏观区域的性能赋权式激光扫描策略,和“光形晶胞”逆向填充式三角面片拓扑重构式新设计理念,形成了构件宏微观结构设计与“光形晶胞”多维堆叠行为的双向调控新机理。
[0068]
在生物仿生构件的“个性化”属性,决定其外形和结构的“差异包容和非唯一性”,以“高可控”成形为目标,提出一种“设计耦合于工艺”的新概念构想,为控形控性增材制造提供了新的灵感和启发。根据构件界/表面三角面片倾角和支撑设计对成形精度的影响规律,提出面向逐点式增材成形的虚拟模型分区模式识别与性能预标注方法。
[0069]
以海量三角面片倾角与悬垂阈值的“概率符合”(以构件中心为原点建立局部坐标系,得到初始姿态下关键局部区域三角面片的顶点坐标(ai,bi,ci)、法向量ni和三角面片角度θi;其中,初始姿态下关键局部区域三角面片的顶点坐标分别表示为:ai=(x
i1
,y
i1
,z
i1
),bi=(x
i2
,y
i2
,z
i2
),ci=(x
i3
,y
i3
,z
i3
);法向量ni=(xi,yi,zi)与z轴负方向的夹角利用优化算法求解构件绕x轴的旋转角度α和绕y轴的旋转角度β,即最佳摆放姿态、支撑布局为前处理静态参量;其优化算法可具体为:
[0070]
1)
[0071]
2)
[0072]
3)
[0073]
得到的最佳摆放姿态为:
[0074][0075][0076]
其中,三维口腔修复体旋转后关键局部区域三角面片的三个顶点的坐标分别变化为:
[0077]a′i(α,β)=a
irx
(α)ry(β);
[0078]b′i(α,β)=b
irx
(α)ry(β);
[0079]c′i(α,β)=c
irx
(α)ry(β);
[0080]
法向量分别变化为:
[0081]n′i(α,β)=n
irx
(α)ry(β);
[0082]
旋转后关键局部区域三角面片法向量与z轴负方向的夹角为:
[0083][0084]
以激光器输出功率、扫描速度、熔池温度为在线动态调控参量,实现虚-实转换效果的正向增强。进一步,系统研究了增材制造单层内光形晶胞及其一、二维堆叠(短线段、小平面)的连接与融合,通过反向调整虚拟数据的微观三维结构设计方法,降低激光调制难度和扫描振镜瞬间加减速导致的能量输出的不确定性。采用实-虚反向优化策略进一步提升了打印性能,初步实现综合性能驱动的复杂自由构件虚实转换过程的双向互哺,显著提升了打印效率和构件的综合性能。
[0085]
一种口腔修复体3d打印装置,如图2所示,包括:
[0086]
数据采集装置:获取口腔修复体的历史数据以及待制作的口腔修复体的信息;
[0087]
口腔修复体构建装置:根据待制作的口腔修复体的信息建立待制作的口腔修复体;
[0088]
数据处理装置:根据口腔修复体的历史数据构建数据库;依据数据库对口腔修复体进行分类预标注以及局部优化;对口腔修复体的部件进行分层切片,规划各片层扫描路径和扫描工艺参数;
[0089]
打印装置:根据分层切片代码打印口腔修复体。
[0090]
实施例2
[0091]
根据图1所示的流程,在cad软件中,设计基底冠、基底桥、可摘局部义齿等复杂口腔修复体时,将部件属性自动标记并将修复体各组件分类为a(高精度)、b(低精度)两部分区域,如图3所示。
[0092]
将制件带有预标记信息的三维设计数据,导入到3d打印排版切片软件中。
[0093]
设定悬垂角度阈值θ,该角度指零部件表面与成形平台xy平面法向最大可无支撑可成型的角度,该角度由粉末材料特性、3d打印机能力和打印工艺共同决定,由实验测定或参照经验参数,为一常数。
[0094]
首先,计算摆放角度,定义:摆放角度为摆放角度为三维口腔修复体绕局部坐标系
x轴的旋转角度α、绕y轴的旋转角度β,利用优化算法求解:
[0095]
(i)关键局部面片θ'1,
…
,θ'n平均值最小;
[0096]
(ii)关键局部面片θ'1,
…
,θ'n小于悬垂角度阈值θ的数量最大;
[0097]
(iii)三维零部件所有面片在打印平面投影面积最小;
[0098]
求得以上条件最优解,即得到三维零部件的摆放角度。
[0099]
接下来,用周围制件的b区域或者成形平台延伸出来的柱状支撑连接到a区域待支撑面接触点。
[0100]
此种支撑起点选择规则:i.该支撑不能和除a区域指定接触点外的任何区域产生干涉,ii.该支撑两端点连线和成形平台xy平面法向夹角小于悬垂角,以满足i、ii条件在b区域或成型平台寻找到a区域指定接触点距离最短的点作为支撑起点。此种支撑与制件的连接结构为锥体结构,这种结构使得支撑与制件的接触面积减小,令支撑更容易从制件上剥离。
[0101]
a、b区域剩余待支撑面的接触点,自动添加实体(树状、柱状等)支撑和非实体(单扫面线/网状)支撑。
[0102]
根据待打印制件特征,对薄弱、易变形区域,补充添加增强支撑。
[0103]
采用先成型切片轮廓、后成型内部填充区域的扫描策略。
[0104]
a区域切片轮廓和内部填充区域均采用高分辨率、较低的扫描速率。b区域切片轮廓区域采用高分辨率、较低的扫描速率,内部填充区域采用低分辨率、较高的线能量密度和扫描速率。为降低温度梯度,相邻两层内部填充扫描路径旋转一定角度。支撑采用低分辨率、较低的扫描速率。
[0105]
生成分层切片加工工艺代码,将分层切片代码输入到打印机的控制软件,即可开始打印。
[0106]
三角面片为口腔修复体表面的最小构成单元。
[0107]
本发明适于各种复杂形态制件的批量打印,可有效提高关键局部的打印精度,并减少支撑的数量、质量和长度,节约打印材料并提高打印效率。
[0108]
相比传统打印方法,使用本算法后可摘局部义齿支架的打印综合效率提高约30%(支撑减少,打印时间和材料损耗均减少),关键局部区域(卡环)精度提高到50μm以内,比传统方法精度显著提高。
[0109]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的装置而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
[0110]
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1