一种键盘铁板贴胶装置的制作方法
1.本发明涉及一种键盘铁板贴胶装置。
背景技术:
2.现有的一些键盘(如薄膜键盘)由于整体结构脆弱,为此,需要在键盘内部粘贴铁板以固定和保护键盘的整体结构。在将铁板粘接在键盘上之前,需要在键盘铁板上的待贴胶区域11粘贴粘胶片(如图1所示),为了将粘胶片粘接在键盘上,最初是通过人工操作的方式进行,而工人在操作时,因为粘接速度、力度的不均,使得粘接在铁板上的粘胶片之间具有气泡,导致粘贴不均匀,进而影响铁板粘接在键盘轴体上的粘接效果,降低键盘品质,因此,现有的一些厂家制作了贴胶装置用于对铁板进行贴胶处理。
3.然而,由于粘胶片在进行粘贴前,粘胶片用于粘贴在铁板的一侧上粘贴有塑料膜,因此,现有的贴胶装置仍然需要工作人员手动将粘胶片放置在贴胶装置上,并手动撕下粘胶片上的塑料膜,而由于塑料膜与粘胶片粘贴紧密,处理起来不仅比较麻烦,且需要花费大量的时间。
技术实现要素:
4.针对上述现有技术的不足,本发明所要解决的技术问题是:提供一种能够自动放置并撕下粘胶片塑料膜的键盘铁板贴胶装置。
5.为解决上述技术问题,本发明采用的一个技术方案是:本发明的键盘铁板贴胶装置包括工作台以及设置在工作台上的粘胶片传送机构、用于去除粘胶片顶面的塑料膜的去膜机构、贴胶机构以及与所述贴胶机构连接的驱动机构,所述驱动机构用于驱动所述贴胶机构移动至所述粘胶片传送机构处以接收粘胶片传送机构传送的粘胶片,驱动机构还用于驱动所述贴胶机构移动至所述去膜机构位置处以去除粘胶片顶面的塑料膜,如此便可通过机械化的方式自动摘除粘胶片顶面的塑料膜,无需手动操作进行;所述贴胶机构用于使所述铁板与去膜后的粘胶片粘贴在一起,机械化的设置能够减轻工作人员的劳动负担。
6.所述粘胶片传送机构、去膜机构以及贴胶机构沿所述工作台的纵向依次间隔设置于所述工作台上,所述驱动机构还用于驱动所述贴胶机构沿所述工作台的纵向途经所述去膜机构后到达所述粘胶片传送机构位置处;所述驱动机构还用于在所述贴胶机构接收所述粘胶片之后驱动所述贴胶机构途经所述去膜机构回到初始位,所述去膜机构用于在所述贴胶机构回位途经时去除所述粘胶片顶面的塑料膜,如此便可使得整个操作过程有序的进行,通过机械化实现输送粘胶片、撕下塑料膜以及贴胶,无需工作人员动手操作。
7.所述粘胶片传送机构包括设于所述工作台上的第一支架、设于所述第一支架上的用于存储叠放在一起的粘胶片的存储盒以及设于所述第一支架上且位于所述存储盒正下方位置处的粘胶片传送组件;所述存储盒上形成有用于取放粘胶片的第一开口,所述存储盒的底部形成有供位于所述存储盒内最底层的一片粘胶片自由下落的第二开口;所述粘胶片传送组件包括可转动地设置于所述第一支架上的第一滚筒、用于使所述第一滚筒转动的
转动件、设置于所述第一滚筒的外周面上的用于承载所述粘胶片的承载槽、用于阻挡所述粘胶片在所述第一滚筒的正下方以外的其他方向脱离所述承载槽的粘胶片挡部,挡部能够在第一滚筒转动过程中挡住承载槽内的粘胶片,直至粘胶片位于第一滚筒的正下方位置处,使得承载槽内的粘胶片能够从第一滚筒的正下方自由下落;在水平投影面上,所述第一滚筒的旋转轴线与所述贴胶机构的纵向移动方向垂直;所述驱动机构用于驱动所述贴胶机构移动至所述第一滚筒正下方位置处,所述第一滚筒带动所述承载槽转动至所述第二开口正下方位置处时,所述最底层的一片粘胶片通过所述第二开口自由下落至所述承载槽中并随所述第一滚筒继续转动,而存储盒内的其他粘胶片收第一滚筒外壁阻挡而无法继续向下移动,所述承载槽被转动至所述第一滚筒底部时,所述粘胶片脱离所述粘胶片挡部而自由下落至所述贴胶机构上,达到自动输送粘胶片的目的。
8.所述第一滚筒的顶面与所述存储盒的底面之间具有第一间隙,所述第一间隙的宽度小于一片粘胶片的厚度;所述承载槽的底面至承载槽槽口之间的间距小于所述一片粘胶片的厚度,如此便可在位于最底层的粘胶片掉落至承载槽内随着第一滚筒一起转动时,次一片的粘胶片不会一同掉落至承载槽内,并不会通过第一间隙被带离第一滚筒,且承载槽内的粘胶片远离承载槽的一侧延伸至承载槽外,避免次一片的粘胶片部分伸出第二开口外并伸入承载槽内以妨碍最下方一片粘胶片随第一滚筒移动,如此便可使得每一次承载槽转动至第二开口正下方时,仅只有一片整的粘胶片通过第二开口,且仅只有一片粘胶片掉落在承载槽内。
9.所述去膜机构包括设置于所述工作台上的第二支架、可转动地设于所述第二支架上的第二滚筒、覆于所述第二滚筒外周面上的塑料膜吸附层以及与所述第二滚筒的一端轴接以驱动所述第二滚筒往复转动的第一驱动件;所述第二滚筒的旋转轴线与所述第一滚筒的旋转轴线平行,且所述第二滚筒的底面高度与位于所述贴胶机构上的粘胶片的顶面高度相适配;所述贴胶机构途经所述去膜机构时从所述第二滚筒的下方穿越而过,所述驱动机构驱动承载有所述粘胶片的贴胶机构途经所述去膜机构后回位时,所述第二滚筒外周面上的塑料吸附层与移动的粘胶片滚动配合以去除所述粘胶片顶面的塑料膜,如此便可在贴胶机构经过去膜机构下方时,第二滚筒上的塑料膜吸附层粘住粘胶片上的塑料膜并撕下,实现自动去除粘胶片顶面塑料膜的效果。
10.所述转动件包括第一减速器,所述第一减速器的输入轴与第二滚筒的另一端传动连接,第一减速器的输出轴与第一滚筒的一端轴接以使所述第一滚筒与所述第二滚筒同向不同速转动。
11.所述贴胶机构包括用于支撑铁板和粘胶片的支撑组件、架设于所述工作台上且能够与所述支撑组件配合以将所述铁板和粘胶片粘贴在一起的按压组件;所述驱动机构用于驱动支撑有所述粘胶片的支撑组件沿所述工作台的纵向途经所述去膜机构后到达所述第一滚筒的正下方以及用于驱动所述支撑组件沿所述工作台的纵向途经所述去膜机构后回到初始位,所述支撑组件的初始位位于所述按压组件的正下方;所述支撑组件在经过所述去膜机构时,所述支撑组件上的粘胶片的顶面与所述第二滚筒外周的塑料吸附层滚动摩擦配合,驱动组件带动支撑组件移动至第一滚筒正下方后,第一驱动件使得第一滚筒和第二滚筒同向不同速地转动,第一滚筒将粘胶片输送至支撑组件上,驱动组件带动支撑组件回位,并在回位过程与塑料吸附层滚动摩擦配合以撕下粘胶片顶面的塑料膜。
12.所述贴胶机构还包括用于在所述支撑组件回到初始位后将所述铁板上料至所述支撑组件上对应于去膜后的粘胶片位置处的铁板上料机构,所述铁板上料机构包括一用于存储层叠在一起的铁板的存储箱和用于将存储箱内的铁板推送至所述支撑组件上用于支撑铁板的位置处的推送组件;所述存储箱朝向所述支撑组件的一侧形成有供所述铁板穿越而出的第四开口,所述存储箱朝向所述推送组件的一侧形成有供所述推送组件的推送端自由出入的第五开口,推动组件经第五开口将铁板从第四开口处推出至支撑组件上以实现自动向上层板输送铁板的目的;当所述支撑组件携带去膜后的粘胶片回至初始位时,所述推送组件将所述存储箱内的一片铁板推送至所述支撑组件上用于支撑铁板的位置处,所述按压组件将所述铁板与所述去膜后的粘胶片按压在一起以实现铁板与所述粘胶片的粘合,达到机械自动化的目的。
13.所述支撑组件包括粘胶片支撑部、间隔设置于所述粘胶片支撑部上方的铁板支撑部以及形成于所述粘胶片支撑部与所述铁板支撑部之间的自恢复弹簧;所述粘胶片支撑部包括下层板以及形成于所述下层板顶面的用于放置所述粘胶片的放置台,所述放置台位置与所述铁板的待粘胶区域位置对应,且所述放置台所在的水平位与所述第二滚筒所在的水平位相适配,如此便可使得第二滚筒的最低面始终与放置台顶面的高度保持一致,便于第二滚筒与放置台顶面的粘胶片之间能够继续滚动摩擦配合;所述铁板支撑部包括形成于所述下层板上方的用于支撑铁板的上层板以及形成于所述上层板上的供所述放置台向上穿入的竖向通槽,所述上层板朝向所述支撑组件的往复移动方向的两端分别形成有第一倾斜面,两所述第一倾斜面朝向相背离的方向向下倾斜,且两所述第一倾斜面最低点所在的水平位与所述第二滚筒所在的水平位相适配,使得上层板在经过第二滚筒下方之间,第二滚筒的最低点先与第一倾斜面接触并挤压第一倾斜面,直至第二滚筒的最底点与放置台顶面齐平;所述自恢复弹簧的上端与所述上层板连接、下端与所述下层板连接以使上层板能够向下移动并下上挤压上层板以使上层板复位;当所述支撑组件位于所述第一滚筒的正下方时,所述承载槽中的粘胶片脱离所述粘胶片挡部后下落于位于所述竖向通槽内的放置台上;当所述支撑组件经过所述第二滚筒时,所述上层板受第二滚筒的位置限定而向下移动以使所述放置台被动向上穿越所述竖向通槽后与所述第二滚筒外周面的塑料膜吸附层滚动摩擦配合;所述按压组件与驱动机构传动配合,当所述驱动机构驱动所述支撑组件从第一滚筒正下方回到初始位时,所述铁板上料机构将铁板上料至所述上层板上,所述驱动机构同时驱动按压组件向下按压铁板和上层板以使其朝向所述下层板方向移动,所述自恢复弹簧被压缩,所述放置台被动穿过所述竖向通槽以使粘胶片贴于所述铁板下表面的待贴胶区域,当驱动机构驱动所述支撑组件从初始位向第一滚筒正下方移动时,驱动机构同时驱动按压组件复位,所述上层板在所述自恢复弹簧的作用下复位,如此可使得按压组件和支撑组件同步运行,支撑组件回到初始位,按压组件向下按压上层板,支撑组件朝向第一滚筒移动,按压组件向上移动复位,如此,在驱动机构实现支撑组件移动的同时实现按压组件的移动,避免更多设备的使用,节约成本。
14.所述上层板的顶面上对应放置台形成有用于放置铁板的限位槽,限位槽具有向上贯通所述上层板的第一槽口以及向所述存储箱方向贯通所述上层板的第二槽口;所述第二槽口的宽度向所述存储箱方向渐宽,如此可便于推送组件在将铁板推送至限位槽内时,对铁板进行导向,使得铁板能够准确的进入到限位槽内,限位槽对铁板进行限位以使铁板能
够达到指定位置并与放置台的位置相适配;所述第二滚筒的长度小于限位槽的长度,如此便可使得第二滚筒能够挤压限位限位槽内的铁板。
15.本发明的键盘铁板贴胶装置,至少具有如下有益效果:
16.通过粘胶片传送机构、去膜机构、贴胶机构以及驱动机构的配合使用,使得粘胶片传送机构向移动至粘胶片传送机构正下方的支撑组件上输送粘胶片,去膜机构将向初始位移动并经过的支撑组件上的粘胶片顶面的塑料膜撕下后,支撑组件带动粘胶片输送至按压组件下方,并在放上铁板后通过按压组件使得粘胶片粘贴在铁板上,以实现机械自动化的进行送胶、撕下塑料膜和贴胶的一体化机械操作,减轻工作人员的工作轻度,节省工作人员的时间。
附图说明
17.此处所说明的附图用来提供对本技术的进一步理解,构成本技术的一部分,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。在附图中:
18.图1为现有技术中的铁板的结构示意图;
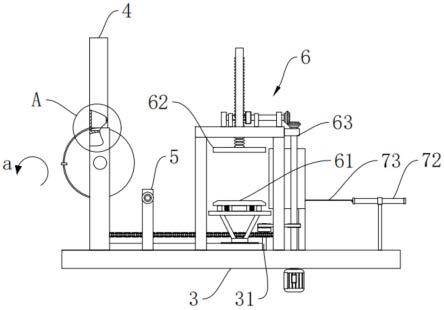
19.图2为本发明的键盘铁板贴胶装置的正视图;
20.图3为图2所示a部分的当大图;
21.图4为本发明的上层板与放置台的配合俯视图;
22.图5为本发明的上层板与放置台的配合结构示意图;
23.图6为本发明的键盘铁板贴胶装置的俯视图;
24.图7为本发明的键盘铁板贴胶装置移除去膜机构和推送机构的右视图;
25.图8为本发明的第一驱动组件的俯视图;
26.图9为本发明的去膜机构与支撑组件配合的正面剖视图;
27.图10为本发明的第一滚筒的正面剖视图;
28.图11为本发明的推送机构的正面剖视图。
29.附图中各标号的含义为:
30.铁板-1;待贴胶区域-11;
31.粘胶片-2;塑料膜-21;
32.工作台-3;第二转轴-31;
33.粘胶片传送机构-4;存储盒-41;存放腔-411;第一支架-42;第一滚筒-43;承载槽-431;粘胶片挡部-44;
34.去膜机构-5;第二支架-51;第二滚筒-52;第一伺服电机-53;
35.贴胶机构-6;支撑组件-61;下层板-611;第一导向柱-612;上层板-613;竖向通槽-6131;限位槽-6132;第一倾斜面-6313;自恢复弹簧-614;放置台-615;垫层-616;按压组件-62;第三支架-621;齿杆-622;第二导向柱-623;按压板
ꢀ‑
624;第一齿轮-625;第三转轴-63;滑轨-631;第一滑块-632;连接块-633;连接杆-634;链轮-635;链条-636;第二滑块-637;第二伺服电机-638;第一移动段-6361;第二移动段-6362;第三移动段-6363;第四移动段-6364;条形通孔-639;存储箱-71;第一空腔-711;第四开口-712;第五开口-713;气缸-72;推送板-73。
具体实施方式
36.下面结合附图对本发明作进一步说明。
37.参照图1所示,键盘的铁板1上具有待贴胶区域11,需要对待贴胶区域11 贴上粘胶片2,所述粘胶片2的两个面上均覆设有塑料膜21。在需要将粘胶片 2粘贴在铁板1上时,首先需要先撕下粘胶面一侧面上的塑料膜21,然后将撕下塑料膜21的一面粘贴在铁板1的待贴胶区域11上以完成铁板1的贴胶操作。
38.参照图2至图11所示,本发明的键盘铁板贴胶装置包括工作台3以及设于所述工作台3上的粘胶片传送机构4、用于去除粘胶片顶面的塑料膜21的去膜机构5、用于将铁板1和粘胶片2粘贴在一起的贴胶机构6以及用于驱动贴胶机构6移动的驱动机构,所述粘胶片传送机构4、去膜机构5以及贴胶机构6 沿所述工作台3的纵向依次间隔设置于所述工作台3上,所述工作台3的纵向对应所述工作台3的左右方向。所述驱动机构用于驱动所述贴胶机构6移动至所述粘胶片传送机构4处以接收粘胶片传送机构4传送的粘胶片2,还用于驱动所述贴胶机构6移动至所述去膜机构5位置处以去除粘胶片2顶面的塑料膜 21;所述铁板上料机构用于将待贴胶的铁板1上料至所述贴胶机构5上对应于所述粘胶片2的位置处,所述贴胶机构5用于使所述铁板1与去膜后的粘胶片 2粘贴在一起。
39.所述粘胶片送胶机构4包括设置于所述工作台3上的第一支架42、设置于所述第一支架42上的用于存储叠放在一起的粘胶片2的存储盒41以及设置所述第一支架42上且位于所述存储盒4正下方位置处的粘胶片传送组件。第一支架42用于支撑存储盒41以及粘胶片传送组件,存储盒41向粘胶片传送组件上输出粘胶片2,而粘胶片传送组件将粘胶片2输送至贴胶机构6上。
40.具体的,第一支架42包括两第一竖直架,两第一竖直架竖向设置在工作台 3的前后两侧。所述存储盒41设置在两第一竖直架的顶部,所述存储盒41呈长方体状,其内形成有用于放置粘胶片2的存放腔411,所述存放腔411沿垂直方向贯通所述存储盒41以使所述存储盒41顶部和底部分别形成第一开口和第二开口,粘胶片2能够从第二开口自由下落,存储盒41的右侧或左侧侧壁上开设有连通所述存放腔411以形成用于观察和取放所述粘胶片2的通口,从而便于观察存放腔411内的粘胶片2,且工作人员能够通过将手伸入通口内以将粘贴片2放置在存放腔411内。
41.所述粘胶片传送组件包括可转动地设置于所述第一支架42上的第一滚筒 43、用于使所述第一滚筒43转动的转动件、设置于所述第一滚筒43的外周面上的用于承载所述粘胶片2的承载槽431和设置在第一滚筒43上的粘胶片挡部44。第一支架42用于支撑第一滚筒43,转动件能够驱动第一滚筒43沿自身轴线转动,承载槽431随着第一滚筒43的转动而进行转动,并在承载槽431转动至第二开口的正下方时,存储盒41内位于最下方的一片粘胶片2经第二开口自由掉落至承载槽431内并随着第一滚筒43继续转动,粘胶片挡部44能够挡住承载槽431内的粘胶片2在承载槽431位于第一滚筒43正下方之外的位置掉落。
42.具体的,两第一竖直架上均沿形成有前后贯通的穿孔,穿孔内设置有轴承,两轴承之间设置分别连接于两轴承的第一转轴以使第一转轴沿前后方向布置,如此便可使得第一转轴沿自身轴线自由转动,第一转轴位于后侧的一端上延伸至穿孔外,所述第一滚筒43固定套设于所述第一转轴上以能够随所述第一转轴自由转动。转动件包括第一减速器(图中未示出),第一减速器的输出轴与第一转轴轴接;所述承载槽431形成于所述第一滚筒43的
外壁上,承载槽431 的深度小于等于一片粘胶片2的厚度以使承载槽431内仅可装载一片粘胶片2,所述承载槽431的槽底面至所述存储盒41的底面之间的间距大于所述一片粘胶片2的厚度以使位于最底部的一片粘胶片2能够完全掉落至第二开口外;且第一滚筒43的顶面与存储盒41的底面之间具有一第一间隙,所述第一间隙的宽度小于一片粘胶片2的厚度,如此可使得所述第二开口处的粘胶片2在承载槽 431没有转动至第二开口正下方时,位于最下方的一片粘胶片2的底面抵在所述第一滚筒43的外表面上,所述粘胶片2的顶面仍位于所述存放腔411的第二开口内,而第一间隙的设置又使得位于最下方的一片粘胶片2不会随着第一滚筒43的转动而从第一间隙滑出。当所述第一滚筒43转动使所述承载槽431位于所述第二开口的正下方位置处时,由于所述承载槽431的槽底至所述存储盒 41的底面间距大于所述一片粘胶片2的厚度,因此,位于最下方的一片粘胶片 2穿过所述第二开口落入所述承载槽431中,而所述承载槽431的底面至所述存储盒41的底面之间的间距大于所述一片粘胶片2的厚度且小于两片粘胶片2 的厚度使得掉落至承载槽431内的一片粘胶片2能够随着所述第一滚筒43转动而转离所述第二开口的正下方。所述粘胶片挡部44用于阻挡所述粘胶片2在所述第一滚筒43的正下方以外的其他方位置处脱离所述承载槽431。一种实施方式中,所述粘胶片挡部44平行设于所述第一滚筒43滚动面外,且粘胶片挡部 44的内侧面与所述第一滚筒43的滚动面之间具有一第二间隙,所述第二间隙的宽度小于一片粘胶片2的厚度,以使粘胶片挡部44在阻挡承载槽431的的粘胶片2的过程中,粘胶片2不会从承载槽431内滑出从而影响粘胶片2的输送。所述粘胶片挡部44上位于所述第一滚筒43的底部的正下方部分形成有供所述粘胶片2从所述承载槽431脱落并向下穿越的穿口。本具体实施方式中,所述粘胶片挡部44为一挡条,所述挡条位于所述第一支架42上远离所述去膜机构 5的一侧,所述挡条的上端延伸至第一滚筒43的上方,挡条延伸至还在第一滚筒43上方的一端端末位于第二开口正下方的左侧,所述挡条的下端沿所述第一滚筒43的滚动面延伸并靠近所述第一滚筒43的底部,所述挡条的内侧面与所述第一滚筒43的滚动面对应位置之间形成所述第二间隙。当所述粘胶片2落入所述承载槽431内后,所述第一滚筒43继续转动以使所述承载槽431转入所述挡条区域,所述承载槽431内的粘胶片2在所述挡条的阻挡下保持在所述承载槽431内,当所述承载槽431位于底部时脱离所述挡条区域,所述粘胶片2自由掉落至所述第一滚筒43的正下方以达到自动输送的目的。
43.所述去膜机构5包括设于所述工作台3上的第二支架51、可转动地设于所述第二支架51上且与所述第一滚筒43平行的第二滚筒52、覆于所述第二滚筒 52外周面上的塑料膜吸附层以及与所述第二滚筒52轴接以驱动所述第二滚筒 52往复转动的第一驱动件,第二支架51用于支撑所述第二滚筒52,所述第二滚筒52的底面高度与位于所述贴胶机构6上的粘胶片2的顶面高度相适配;所述贴胶机构6途经所述第二滚筒52时从第二滚筒52的下方穿越而过,所述驱动机构驱动承载有所述粘胶片2的贴胶机构6途经所述第二滚筒52后回位时,塑料膜吸附层与移动的粘胶片2滚动配合以取出所述粘胶片2顶面的塑料膜21。
44.具体的,第二支架51包括沿所述工作台3的一前一后设置在所述工作台3 上的两第二竖直架和横向设置于所述两第二竖直架之间的横梁。两第二竖直架上均嵌设有轴承,第二滚筒52的两端分别连接于两轴承中以能够绕自身轴线转动。塑料膜吸附层具有粘性,以能够粘住粘贴片2上的塑料膜21。
45.第一驱动件包括第一伺服电机53,第一伺服电机53设置在其中一第二竖直架上,
第二滚筒52的一端穿过对应的轴承和第二竖直架,第二滚筒52穿出第二竖直架的一端与第一伺服电机53的输出轴轴接,第一伺服电机53运行以能够带动第二滚筒52沿a方向(如图2)进行转动,第一减速器的输入轴与第二滚筒52的另一端传动连接。当使得第一伺服电机53运行时,第一伺服电机 53驱动第二滚筒52沿a方向转动时,第一减速器通过与第二滚筒52传动配合以带动第一滚筒43沿a方向进行转动,对应的,粘胶片挡部44设置在第一滚筒43的左侧,沿a方向转动能够使得贴胶机构6带动粘胶片2沿纵向方向向右侧移动时,粘胶片吸附层能够在粘住塑料膜21后逆着粘胶片2移动的方向逆向撕下塑料膜21,如此便于更好的撕下塑料膜21;而第一减速器的使用以使所述第一滚筒43缓慢转动,如此便可通过第一伺服电机53实现第一滚筒43和第二滚筒52的联动,并使得第一滚筒43和第二滚筒52同向不同速的转动;而由于第二滚筒52和第一滚筒43的作用和转动的周长不同,第二滚筒52需要在第一伺服电机53运行后,在贴胶机构6移动至第一滚筒43正下方至被第二滚筒52 去除贴胶机构6上的粘胶片2顶面的塑料膜21之后的这段时间内仅转动一周、而第二滚筒52需要转动多周,因此,第一减速器的设置实现第一滚筒43和第二滚筒52同向不同速的进行转动,避免因第一滚筒43转动过快而使得承载槽 431内的粘胶片2在贴胶机构6不在第一滚筒43正下方时从第一滚筒43正下方掉落,从而造成不必要的麻烦。
46.所述贴胶机构6包括设置在所述驱动机构上的支撑组件61、架设在所述工作台3上且能够与所述支撑组件61配合以将铁板1和粘胶片2粘贴在一起的按压组件62以及用于向贴胶机构6上推送铁板1的铁板上料机构,所述支撑组件 61用于支撑铁板1和粘胶片2,驱动机构用于驱动支撑组件61沿工作台3的纵向方向移动,并在经过第二滚筒52后到达所述第一滚筒43的正下方,同时,驱动机构驱动按压组件62向上移动;在粘胶片传送机构4将粘胶片2输送至支撑组件61上之后,驱动机构继续带动承载有粘胶片2的支撑组件61沿工作台 3的纵向方向经过第二滚筒52下方,支撑组件61上的粘胶片2顶面与第二滚筒52的塑料膜吸附层滚动摩擦配合,直至支撑组件61位于按压组件62的正下方,同时,驱动机构驱动按压组件62向下移动以在支撑组件61移动至正下方,铁板上料机构在支撑组件61移动至初始位(所述按压组件62的正下方为所述初始位)时将铁板1输送至支撑组件61上之后,按压组件62挤压支撑组件61 上的铁板1以使铁板与粘胶片2粘贴在一起。具体的,驱动机构驱动支撑组件 61从初始位向第一滚筒43移动的同时驱动按压组件62向上移动,驱动机构驱动支撑组件61从第一滚筒43向初始位移动的同时驱动按压组件62向下移动,以实现支撑组件61和按压组件62之间的联动。
47.具体的,所述支撑组件61包括连接于驱动机构的粘胶片支撑部、间隔设置于所述粘胶片支撑部上方的铁板支撑部以及形成于粘胶片支撑部与铁板支撑部之间的自恢复弹簧614,粘胶片支撑部用于支撑粘胶片2,铁板支撑部用于支撑铁板1,驱动机构驱动按压组件62按压铁板1和粘胶片支撑部以使铁板1和粘胶片2粘贴在一起,在按压组件62按压铁板1的过程中,自恢复弹簧614收缩,当按压组件62向上移动以远离粘胶片支撑部之后,粘胶片支撑部受自恢复弹簧 614的弹力而复位。
48.在本实施例中,所述粘胶片支撑部包括下层板611以及形成于所述下层板 611顶面的用于放置所述粘胶片2的放置台615,所述放置台位置与所述铁板1 的待粘胶区域11位置对应,且所述放置台615所在的水平位与所述第二滚筒52所在的水平位相适配,即放置台615的顶面与第二滚筒52的底面在同一水平面上以使第二滚筒52能够在放置台615经过第
二滚筒52正下方时,与放置台615顶面的粘胶片2滚动配合;所述铁板支撑部包括对应所述待贴胶区域11 并用于供所述放置台615向上穿入的贯通的竖向通槽6131,所述上层板613朝向所述支撑组件61的往复移动方向的两端(即左右两端)分别形成有第一倾斜面6133,两所述第一倾斜面6133朝向相背离的方向向下倾斜,且两所述第一倾斜面6133的最低点所在的水平位与所述第二滚筒52所在的水平位相适配;所述自恢复弹簧614的上端与所述上层板613连接、下端与所述下层板611连接。当驱动机构带动上层板613和放置台615移动至第一滚筒43的正下方时,承载槽431内的粘胶片2通过竖向通槽6131并掉落至放置台615上,当驱动机构驱动放置台615和上层板613经过第二滚筒52时,上层板613受到第二滚筒 52的挤压第一倾斜面6133以使上层板613向下移动,如此便可使得放置台615 被动向上穿过所述竖向通槽6131后与第二滚筒52外周面上的塑料膜吸附层滚动配合,从而去掉粘胶片2顶面上的塑料膜21.
49.具体的,下层板611的顶面竖直设置有第一导向柱612,上层板613上竖向开设有与第一导向柱612滑动配合的第一导向孔,第一导向柱612滑动穿装在第一导向孔内,当所述上层板613向所述下层板611方向移动和复位时,第一导向柱612对上层板613进行导向,以防止所述上层板613在移动过程中偏离,确保上层板613能够准确无误的竖直移动至下层板611的位置处。所述上层板613的顶面上对应所述铁板1的位置形成有用于放置铁板1的限位槽6132,限位槽6132的深度小于等于铁板1的深度,以使按压组件62能够按压铁板1,限位槽6132具有向上贯通所述上层板613的第一槽口以及向所述铁板上料机构方向贯通所述上层板613的第二槽口;所述第二槽口的宽度向所述铁板上料机构方向渐宽;所述第二滚筒52的长度小于限位槽6132的长度以便于铁板上料机构向限位槽6132内推送铁板1,第二槽口向所述铁板上料机构方向渐宽设置使得铁板1在被推动的过程中,即使铁板1有发生偏移也会随着第二槽口而被推送至限位槽6132内,限位槽6132限定铁板1的位置,使得铁板1能够保持在对应的位置,以保证粘胶片2的粘贴位置;所述竖向通槽6131设置在限位槽 6132的底面上对应待贴胶区域11的位置处,放置台615对应竖向通槽6131设置并能够伸入并穿出竖向通槽6131外。
50.两所述第一倾斜面6133分别对称设置在上层板613顶面的左右两侧上,位于左侧的第一倾斜面6133向左下渐斜,位于右侧的第一倾斜面6133向右下渐斜,第一倾斜面6133的底侧的高度低于或等于第二滚筒52底部的高度,由于上层板613在未受到第二滚筒52的力的作用下,自恢复弹簧614向上伸展而支撑上层板613,以使得放置台615的顶面高度低于限位槽6132底面所在的高度,因此,在下层板611从左至右准备经过第二滚筒52的下方时,上层板613的顶面高度高于第二滚筒52底面的高度,而第一倾斜面6133的设置,使得第二滚筒52在接触到上层板613之前首先与上层板613位于右侧的第一倾斜面6133 接触,而第二滚筒52在转动过程中挤压第一倾斜面6133,使得上层板613被下压,自恢复弹簧614向下收缩,直至第二滚筒52位于限位槽6132内、第二滚筒52的底面与限位槽6132的底面接触,自恢复弹簧614停止收缩;随着上层板613继续向初始位移动,第二滚筒52在转动过程中逐渐靠近粘胶片2的右侧边缘,直至第二滚筒52的粘胶片吸附层粘住粘胶片2右侧边缘的塑料膜21,粘住后,上层板613继续向右移动,第二滚筒52沿a方向转动以带动塑料膜 21相对于粘胶片2逆方向移动,如此便可更轻易的将塑料膜21撕下;由于第二滚筒52是从粘胶片2的边缘开始粘贴,因此,塑料膜21很容易就被粘住并撕开,且在第二滚筒52转动过程中,粘贴片2
会因第二滚筒52的转动而向粘胶片2提供一个朝向右下方向的力,以使粘胶片2可能会被推向右侧并抵在竖向通槽6131的右侧壁上,加之第二滚筒52在接触并挤压粘贴片2的过程中挤压粘贴片2,使得粘贴片2在塑料膜21被卷走后不会被推出竖向通槽6131外或者被第二滚筒52带走。为了进一步防止粘贴片2可能随着第二滚筒52移动,在放置台615的顶面上设置有垫层616,用于加大粘贴片2底面与放置台615 之间的摩擦力,从而在第二滚筒52向粘贴片2提供一个推力时,使得粘贴片2 难以被推动,垫层616优选采用亚敏胶粘剂,且垫层616优选设置在放置台615 的中部并呈条状,以从粘胶片2中部吸附住粘胶片2,放置粘胶片2底面的塑料膜21被撕下而导致粘胶片2被第二滚筒52带走;而亚敏胶粘剂在具有较大的黏附力的同时不会贴在粘贴片2上,以进一步保证粘胶片2不会被第二滚筒 52带离放置台615。
51.参照图11所示,在本实施例中,限位槽6132的左侧侧壁形成有第三倾斜面,所述第三倾斜面的上倾斜端向上且向左倾斜,下倾斜端向下且向右倾斜,如此可使得所述第二滚筒52在粘住塑料膜21后通过挤压第三倾斜面而挤压上层板613,使得上层板613向下移动直至第二滚筒52转离限位槽6132。被粘附在第二滚筒52的塑料膜吸附层上的塑料膜21可通过人工处理的方式取下,并不会影响对铁板1贴胶的时间和操作。
52.所述自恢复弹簧614可设置为四个,并以上层板613和下层板611的中点为中心呈矩形阵列布置。在初始状态下,自恢复弹簧614自然伸展并支撑上层板613,当按压组件62向下按压上层板613或第二滚筒52按压上层板613后,上层板613下行使自恢复弹簧614收缩,当按压组件62或第二滚筒52远离上层板613后,上层板613受自恢复弹簧614伸展的弹力而回复原位。
53.所述按压组件62包括固定设置在工作台3上的第三支架621、竖直设置在第三支架621上并能够在竖直方向上移动的齿杆622、设置在第三支架621上并与齿杆622啮合配合的第一齿轮625、竖直并滑动设置在第三支架621上的第二导向柱623和连接在第二导向柱623底端并用于按压铁板1的按压板624,第一齿轮625与驱动机构传动连接,驱动机构带动第一齿轮625转动,第一齿轮625通过与齿杆622啮合配合以带动齿杆622向上或向下移动,当驱动机构带动去掉塑料膜21后的粘胶片2向初始位移动的同时,驱动机构驱动第一齿轮 625转动,如此便可使得齿杆622向下移动,而齿杆622底端的按压板624向下移动,直至上层板613和放置台615移动至按压板624的正下方、按压板624 按压铁板1并使得粘胶片2粘贴于铁板1上之后,驱动机构驱动上层板613和放置台615向左移动,同时驱动第一齿轮逆向转动,从而带动齿杆622向上移动,使得按压板624远离上层板613。
54.具体的,第三支架621包括四个第三竖直架和一水平支撑板,四个第三竖直架两两竖直分设在工作台3顶面的前后两侧上,且各第三竖直架均位于第二支架51的右侧,水平支撑板设置在各第三竖直架的顶端。在水平支撑板上间隔开设有四个穿孔,四个穿孔位于同一直线上,齿杆622设置为两个并竖直设置,两齿杆622分别活动穿装在位于中间的两个穿孔上,第二导向柱623设置为两个并竖直设置,两第二导向柱623分别滑动穿装在另外两个穿孔内,按压板624 水平设置并与各齿杆622和第二导向柱623延伸至穿孔下方的一端连接。
55.优选的,齿杆622远离第一齿轮625的一侧上沿齿杆622的长度方向设置有凹槽,对应的穿孔内设置有与凹槽滑动配合的凸部,如此便可使得第一齿轮 625在于齿杆622啮合过程中,齿杆622远离第一齿轮625的一侧抵在凸部上,从而防止齿杆622打滑,使得齿杆622
能够更顺畅的竖直移动。
56.所述铁板上料机构用于在支撑组件61回到初始位后将铁板1上料至支撑组件61的限位槽6132内,所述铁板上料机构包括用于存储层叠在一起的铁板1 的存储箱71和用于将存储箱71内的铁板推送至限位槽6132内的推送组件,存储箱71上朝向上层板613的一侧形成有供铁板1穿出的第四开口712,存储箱 71朝向所述推送组件的一侧形成有供所述推送组件推送端自由出入的第五开口713,当驱动机构带动去掉塑料膜21后的粘胶片2回到初始位时,所述推送组件的推送端朝向存储箱71移动,并经第五开口713将存储箱71内的铁板1 从第四开口712处推向限位槽6132内,随后按压板624在驱动机构的驱动下挤压铁板1以使铁板1和去掉塑料膜21后的粘胶片2粘贴在一起,从而实现对铁板1的自动送料,进一步提升铁板1粘胶的自动化操作。
57.在本实施例中,存储箱71的底部竖向设置有用于支撑存储箱71的多根支撑杆;所述存储箱71内形成有用于存放所述铁板1的第一空腔711,所述第一空腔711的底面高于所述限位槽6132的底面;所述存储箱71的顶部形成有用于工作人员将铁板1放置于存储箱71内的第三开口;所述存储箱71面向上层板613的一侧(即左侧)上开设用于供所述第一空腔711内的铁板1通过的所述第四开口712;所述存储箱71背向上层板613的一侧上(即右侧)开设有连通第一空腔711的所述第五开口713。其中,所述第四开口712的顶面到底面之间的垂直距离小于两个铁板1的厚度之和并大于一个铁板1的厚度,如此便可使得第四开口712处每次仅能通过一片铁板1;第四开口712和第五开口713 的底面与第一空腔711的底面齐平,以使得推送组件在推送最底层的一铁板1 时,其他铁板1不会被推出第四开口712而影响铁板1的输送。
58.所述推送组件包括气缸72和推送板73,气缸72通过一竖直设置的固定架横向设置在工作台3的顶面上,并位于存储箱71背向上层板613一侧上,气缸 72的活塞杆朝向第五开口713设置,推送板73横向连接于气缸72的活塞杆,推送板73的顶面低于第五开口713的顶面,推送板73的底面高于第五开口713 的底面以使推送板73能够自由穿越第五开口713。当上层板613被驱动机构带动至初始位时,气缸72运行,气缸72的活塞杆朝向第五开口713伸出以带动推送板73朝向存储箱71内移动;当推送板73推动位于最底层的铁板1经第四开口712被推送至限位槽6132内直至铁板1抵在限位槽6132的左侧壁上,即完成铁板1的自动输送,实现整体的机械自动化操作。
59.驱动机构包括设置在工作台3上并能够往复转动的第二伺服电机638、设置在工作台3上并与所述下层板611连接的第一驱动组件以及设置在第三支架上621的第二驱动组件,第二伺服电机638分别与第一驱动组件和第二驱动组件传动配合,第一驱动组件用于带动支撑组件61沿工作台3的纵向方向移动,第二驱动组件用于带动第一齿轮625往复转动。
60.第一驱动组件包括沿所述工作台3纵向设置的滑轨631、滑动配合于所述滑轨631上的第一滑块632、与所述第一滑块632连接且在水平投影面上与所述滑轨631垂直的连接块633、下端与所述连接块633连接、上端与所述下层板611连接的连接杆634、可转动设置于所述工作台3上的多个链轮635、套设于所述链轮635上的链条636以及第二滑块637,第二伺服电机638与其中一个链轮635传动连接,并通过链条636带动各链轮635转动。
61.所述连接块633具有沿其长度方向(即前后方向)设置的条形通孔639,所述第二滑块637滑动配合且限位于所述条形通孔369内,第二滑块637始终位于条形通孔369内且始终
平行于条形通孔369滑动;且所述第二滑块637与所述链条636的下端可转动连接以使第二滑块637能够相对于链条636在水平方向上自由转动。所述多个链轮635对分成两组,两组链轮635以所述滑轨631 为对称轴对称分设在所述滑轨635的前后两侧。在水平投影面上,所述多个链轮635呈矩阵分布。所述链条636绕多个链轮635一圈套设于各链轮635上。
62.滑轨631沿工作台3的纵向方向水平设置在工作台3的顶面上,且滑轨631 的两端分别延伸至第一支架42、第二支架51和第三支架621的下方,第一滑块632滑动设置在滑轨631上以能够在滑轨631上左右滑动。所述连接块633 呈条状,连接块633上沿连接块633的长度方向开设有竖直贯通的条形通孔 639,连接块633沿垂直于滑轨631的方向水平连接于第一滑块632以能够沿滑轨631在第一滚筒43和按压板624的下方左右滑动。所述连接杆634设置为两个,两个连接杆634均呈“v”字型状,其中一个连接杆634的底部连接于连接块633的前侧,顶部的两端连接于下层板611的前侧,另一个连接杆634的底部连接于连接块633的后侧,顶部的两端连接于下层板611的后侧,从而形成一个较为稳定的支撑结构,以对下层板611进行支撑。工作台3上竖直设置有四根第二转轴31,第二转轴31通过轴承连接在工作台3上以使第二转轴31能够沿自身轴线自由转动,其中两个第二转轴31位于第一滚筒43的正下方并间隔设置,另外两个第二转轴31位于按压板624的正下方并间隔设置,四个第二转轴31呈矩形阵列布置,即位于第一滚筒43下方的两第二转轴31之间的距离与位于按压板624下方的两第二转轴31之间的距离相同,链轮635设置为四个,四个链轮635分别套设在四个第二转轴31上,以使四个链轮635能够沿第二转轴31的轴线自由转动,链条636绕设在四个链轮635上以与四个链轮635传动配合。其中一个第二转轴31的底端延伸至工作台3的下方并与第二伺服电机 638轴接。在一些实施方式中,也可在第二伺服电机638的输出轴上套装第四齿轮、在延伸至工作台3下方的第二转轴31上套装第五齿轮并通过第二齿带,使得第二齿带套装在第五齿轮和第四齿轮上以实现传动配合,第二伺服电机 638运行能够带动其中一第二转轴31转动,对应的链轮635转动并通过链条636 与链轮635之间的传动带动各链轮635转动,而链条636上的第二滑块637随着链条636的绕动而进行移动,第二滑块637通过与条形通孔639之间的滑动配合使得连接块633沿左右方向移动。
63.所述链条636绕设在四个链轮635上,以使得链条636整体呈现出长方形状,而连接在链条636上的第二滑块637随着链条636的移动分别有四条移动段,第二滑块637在位于第一滚筒43下方的平行于第一滚筒43的链条636链段为第一移动段6361,第二滑块637在位于按压板624下方的平行于第一滚筒 43的链条636链段为第二移动段6362,第二滑块637在位于后侧的两链轮635 所在的链条636链段为第三移动段6363,第二滑块637在位于前侧的两链轮635 所在的链条636链段为第四移动段6364。应当理解的是,第三移动段6363和第四移动段6364的位置可交换,不局限于本实施例。第一移动段6361和第二移动段6362的长度等于条形通孔639的长度,当第二滑块637随着链条636 在第一移动段6361或第二移动段6362移动时,第二滑块637沿平行于第一滚筒43的方向(即前后方向)在条形通孔639内滑动,而条形通孔639与第一滚筒43平行,此时,由于连接块633与第一滑块632之间的连接固定,第二滑块 637在前后方向上滑动不会影响连接块633的位置,连接块633停留在第一滚筒43或按压板624的正下方。当连接块633停留在第一滚筒43正下方时,第二伺服电机638可继续运行,同时,第一伺服电机53运行并在第二滑块637 移动至第三移动段6363之前使得第一滚筒43向放置台615上输送粘胶片2;当连接块633停留在第一滚筒43正下方时,第二伺服电机
638可停止运行,随后,第一伺服电机53运行使得第一滚筒43向放置台615上输送粘胶片2后,第二伺服电机638运行使得第二滑块637继续随链条636移动。第二滑块637 移动至第一移动段6361与第三移动段6363之间(即第二滑块637随着链条636 移动至对应链轮635处)时,由于条形通孔639对第二滑块637进行限位,使得第二滑块637在移动至链轮635处时相对于链条636进行转动,以使第二滑块637始终平行并限位于条形通孔639内;当第二滑块637移动至第三移动段 6363时,第二滑块637沿垂直于条形通孔639的方向移动,同时通过条形通孔 639的内壁牵动连接块633随着第二滑块637在水平投影面上沿垂直于条形通孔639方向移动,从而带动下层板611、放置台615以及放置台615上的粘胶片2逐渐靠近初始位,并经过第二滚筒52的下方,第二滚筒52与粘胶片2滚动配合;当第二滑块637随链条636移动至第三移动段6363与第二移动段6362 之间对应的链轮635处时,第二滑块637相对于链条636转动,直至第二滑块 637移动至第二移动段6362,第二滑块637在条形通孔639内滑动,对应的,连接块633停留在按压板624的正下方。当连接块633停留在按压板624的正下方时,第二伺服电机638继续运行,第二滑块637在条形通孔639内继续滑动,按压板624向下朝向上层板613移动直至挤压限位槽6132内的铁板1以使得铁板1与粘胶片2粘贴在一起,直至第二滑块637移动至第二移动段6362 和第四移动段6334之间所对应的链轮635处时,第二伺服电机638停止运行,并方向转动,使得按压板624向上移动,第二滑块637原路返回以进行第二轮粘胶操作。本实施例能够在第二伺服电机638不关闭的情况下实现上层板613、下层板611和放置台615在第二滚筒52和按压板624下方进行停留,不仅使得整个工作流程能够有序的进行,且避免需要多次断开第二伺服电机638才能使得上层板613、下层板611和放置台615在第一滚筒43下方和按压板624下方停止,从而简化操作流程和程序。
64.所述第二驱动组件包括设置在第三支架621的水平支撑架的顶面上的第二减速器和竖直设置在工作台3上能够沿自身轴线自由转动的第三转轴63,所述第一齿轮625与第二减速器的输出轴传动连接,第二减速器的输入轴与第三转轴63轴接,第三转轴63的底端延伸至工作台3的底部并与第二伺服电机638 传动连接。当第二伺服电机638运行时,带动第三转轴63转动,以带动第二减速器的输入轴转动并使得第二减速器的输出轴转动,从而带动第一齿轮625转动,而第一齿轮625转动时,齿杆622与第一齿轮625啮合并使得齿杆622向上或向下移动,如此便可带动按压板624向上或向下移动,而第二减速器的设置使得第一齿轮625缓慢转动,由于齿杆622的移动距离比支撑组件61的移动距离短,因此,为了实现支撑组件61在从第一滚筒43下方移动至初始位时齿杆622带动按压板624向下移动,并在支撑组件61移动至第三移动段6363时按压板624刚好能够挤压铁板1;为了实现支撑组件61从初始位移动至第一滚筒43下方时齿杆622带动按压板624向上移动的目的,需使得第一齿轮625 转动缓慢;而在实际使用中,也可不设置第二减速器,可通过增加第三支架621 的高度和齿杆622的长度达到相同的目的,而实际增加的长度根据第三移动段 6363和第二移动段6362之间的距离以及第二伺服电机638运行后带动链条636 转动的速度进行相关计算,并通过有限的试验能够得到,在此不再赘述。
65.在本实施例中,气缸72、第一伺服电机53和第二伺服电机638均与一控制器电性连接,工作台3上位于按压板624的下方设置有第一接近开关,第一接近开关与控制器电性连接,当下层板611移动至按压板624的正下方时,第一接近开关向控制器发送信号,控制器控制第一伺服电机53停止运行,同时控制气缸72运行,并在按压板624接触上层板613之前将
存储箱71内的铁板1 推入限位槽6132内,直至第二滑块637移动至第二移动段6362与第四移动段 6364之间时控制第二伺服电机638停止运行,此时,按压板624挤压在铁板1 上并使得铁板1与粘胶片2粘贴在一起。在本实施例中,可通过在位于第二移动段6362与第四移动段6364所出链轮635正下方的工作台3上设置与控制器电性连接的传感器,当第二滑块637移动至第二移动段6362与第四移动段6364 之间时,传感器向控制器发出信号,控制器控制第二伺服电机638停止运行或反向转动;并在工作台3上位于第一支架42的下方设置第二接近开关,当第二滑块637移动并靠近位于前侧的第一竖直架时,第二接近开关向控制器发送信号,控制器控制第二伺服电机638停止运行或正向转动,当第二伺服电机638 正向转动时,控制器控制第一伺服电机53运行,以进行下一次送胶贴胶操作。
66.本发明的键盘铁板贴胶装置的其中一种实施例的工作方式如下:
67.一、支撑组件61从初始位向粘胶片传送机构4移动,且按压组件62上升回位:第二伺服电机638驱动链轮635转动,链轮635带动链条636和其他链轮635传动配合,第二滑块637随着链条636依次经第二移动段6362、第三移动段6363和第一移动段6361直至位于第一滚筒43的正下方;同时,第二伺服电机638驱动第一齿轮625转动以使得齿杆622与第一齿轮625啮合而向上移动,如此便可带动按压板624向上移动;
68.二、粘胶片2传送:当第二滑块637移动至第一移动段6361与第四移动段 6364之间时,第一伺服电机53启动,第一伺服电机53带动承载槽431内的粘胶片2移动至第一滚筒43的正下方后,粘胶片2掉落在放置台615上;随后第二滑块637移动至第三移动段6363后继续移动以带动上层板613在工作台3 的纵向上移动;
69.三、去膜机构5去膜:第二滑块637在第三移动段6363上继续移动时,带动支撑组件61回位,并在回位过程中使所述支撑组件61途经去膜机构5下方,第一伺服电机53带动第二滚筒52沿与支撑组件61相逆的a方向转动,当上层板613右侧的第一倾斜面6133与第二滚筒52的底面接触时,第二滚筒52仍向 a方向转动,第二滚筒52在转动过程中挤压继续向初始位移动的上层板613,直至第二滚筒52的底面接触粘贴片2的右侧边缘的塑料膜21并粘住塑料膜,并在第二滚筒52转动过程中,塑料膜吸附层粘住粘贴片2边缘的塑料膜21,并在放置台615右移过程中卷走塑料膜21以去掉粘胶片2顶面的塑料膜21,之后支撑组件61继续向初始位移动,第一伺服电机53继续运行以使得承载槽 431转动至第二开口正下方使得下一片粘胶片2掉落至承载槽431内后继续运行;
70.四、支撑组件61回位:当第二滑块637移动至第二移动段6362时,支撑组件61位于初始位,在这个过程中,第二伺服电机638带动第一齿轮625转动以带动齿杆622向下移动;
71.五、铁板上料机构上料:在第二滑块637移动至第三移动段6363与第二移动段6362之间时,第一伺服电机53停止,此时,第一滚筒43转动一周,承载槽431带着装载的粘胶片2转动至粘胶片挡部所在位置;按压板624逐渐靠近上层板613;同时,气缸72启动,气缸72的活塞杆带动推送板73将第一空腔 711最下方的一铁板1推向限位槽6132内后推送板73退离限位槽6132外;六:铁板1与粘胶片2粘合:推送板73退离限位槽6132外之后,按压板624 接触上层板613并按压上层板613,同时带动限位槽6132内的铁板1靠近粘贴片2直至粘贴片2粘贴在铁板1底面上而按压板624无法继续向下移动后,第二滑块637移动至第二移动段6362和第四移动段6364之后,第二伺服电机638 反向转动,第二伺服电机638带动按压板624随着齿杆622向上移动并带动支撑组件61向左移动,在移动过程中,工作人员取下限位
槽6132上的铁板1即可,直至第二滑块637移动至第一移动段6361后,第二伺服电机638正向转动,以往复操作。
72.本发明的键盘铁板贴胶装置于现有技术相比,不需要工作人员手动放置粘胶片2和手动撕下粘胶片2上的塑料膜21,降低了工作人员的劳动强度,且避免了工作人员因需要手动撕下塑料膜21而浪费时间,实现机械自动化操作。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1