一种橡胶片运输过程中的可识别高度搬导机械手的制作方法
1.本实用新型涉及一种橡胶片运输过程中的可识别高度搬导机械手,属于橡胶片挤出设备领域。
背景技术:
2.橡胶片挤出生产工艺过程中,挤出的胶片需要冷却加隔布收藏,现有技术中进行加隔布收料分层码料过程(简称摆片)采取的是人工操作方式。存在的问题是工人劳动强度大、生产效率低下。
技术实现要素:
3.本实用新型需要解决的技术问题是提供一种橡胶片运输过程中的可识别高度搬导机械手,能够自动接收上一工序输送来的胶片,过x、y方向的移动和180度翻转自动将胶片输送至百叶式胶片储运车,实现自动化,提高运输效率。
4.为解决上述技术问题,本实用新型所采用的技术方案是:
5.一种橡胶片运输过程中的可识别高度搬导机械手,包括机架和设置于机架上通过电机和升降丝杠运动副带动沿y方向上下移动的移动架,移动架上设置有通过伸缩气缸和往复平移运动副带动沿x方向水平往复移动的双层梳状接料手;
6.所述双层梳状接料手包括一侧固定呈一定高度的顶层梳状接料手和底层梳状接料手,且顶层梳状接料手和底层梳状接料手分别由多根方条状料杆均匀间隔固定而成,双层梳状接料手的固定侧设置于转动轴上,且转动轴的两端分别设置有提供动力带动双层梳状接料手翻转180
°
的旋转摆动气缸;旋转摆动气缸、伸缩气缸和电机分别与控制单元信号连接。
7.本实用新型技术方案的进一步改进在于:所述层梳状接料手和底层梳状接料手的方条状料杆之间通过方木块间隔固定。
8.由于采用了上述技术方案,本实用新型取得的技术进步是:
9.本实用新型能够自动接收上一工序输送来的胶片,过x、y方向的移动和180度翻转能够自动将胶片输送至百叶式胶片储运车,实现自动化,提高运输效率。
附图说明
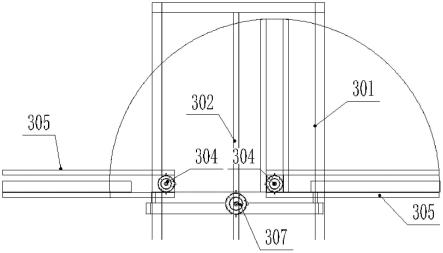
10.图1是本实用新型主视示意图;
11.图2是本实用新型俯视示意图;
12.其中,301、机架,302、升降丝杠运动副,303、伸缩气缸,304、旋转摆动气缸,305、双层梳状接料手,306、转动轴,307、电机。
具体实施方式
13.下面结合实施例对本实用新型做进一步详细说明:
14.如图1和2所示,可识别高度搬导机械手包括机架301,机架301上设置有能够沿y方向上下移动的移动架,所述移动架通过电机307和升降丝杠运动副302带动上下移动。移动架上设置有双层梳状接料手305,通过设置于移动架上的伸缩气缸303和往复平移运动副带动沿x方向水平往复移动。使得双层梳状接料手305能够y方向上下移动达到不同高度的物料层板,同时还能沿x方向水平移动,将胶料输送至物料层板。
15.所述双层梳状接料手305包括由方条状料杆均匀间隔固定而成的顶层梳状接料手和底层梳状接料手,其能够与前一工序的梳排状推料手交叉配合,且顶层梳状接料手和底层梳状接料手的一侧固定呈一定高度,且其固定侧设置于转动轴306上,转动轴306的两端分别设置有提供动力的旋转摆动气缸304,使得双层梳状接料手305能够翻转180
°
。旋转摆动气缸304、伸缩气缸303和电机307分别与控制单元信号连接。
16.本实用新型能够自动接收上一工序输送来的胶片,过x、y方向的移动和180度翻转能够自动将胶片输送至百叶式胶片储运车,实现自动化,提高运输效率。
技术特征:
1.一种橡胶片运输过程中的可识别高度搬导机械手,其特征在于:包括机架(301)和设置于机架(301)上通过电机(307)和升降丝杠运动副(302)带动沿y方向上下移动的移动架,移动架上设置有通过伸缩气缸(303)和往复平移运动副带动沿x方向水平往复移动的双层梳状接料手(305);所述双层梳状接料手(305)包括一侧固定呈一定高度的顶层梳状接料手和底层梳状接料手,且顶层梳状接料手和底层梳状接料手分别由多根方条状料杆均匀间隔固定而成,双层梳状接料手(305)的固定侧设置于转动轴(306)上,且转动轴(306)的两端分别设置有提供动力带动双层梳状接料手(305)翻转180
°
的旋转摆动气缸(304);旋转摆动气缸(304)、伸缩气缸(303)和电机(307)分别与控制单元信号连接。2.根据权利要求1所述的一种橡胶片运输过程中的可识别高度搬导机械手,其特征在于:所述层梳状接料手和底层梳状接料手的方条状料杆之间通过方木块间隔固定。
技术总结
本实用新型公开了一种橡胶片运输过程中的可识别高度搬导机械手,包括机架和设置于机架上通过电机和升降丝杠运动副带动沿Y方向上下移动的移动架,移动架上设置有通过伸缩气缸和往复平移运动副带动沿X方向水平往复移动的双层梳状接料手;所述双层梳状接料手包括一侧固定呈一定高度的顶层梳状接料手和底层梳状接料手,双层梳状接料手的固定侧设置于转动轴上,且转动轴的两端分别设置有提供动力带动双层梳状接料手翻转180
技术研发人员:张泽辉 刘亚建 陈红霞 陈雪姣 刘欣欣 郑程程 赵莹 刘佳 张克俭
受保护的技术使用者:河北橡一医药科技股份有限公司
技术研发日:2022.02.16
技术公布日:2022/9/1
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1