一种多功能软管抓取装置的制作方法
1.本实用新型涉及自动化设备技术领域,尤其是涉及一种多功能软管抓取装置。
背景技术:
2.注肩设备在生产过程中,常使用机械手为注塑模具上料,注肩完成后再使用机械手从注塑模具上取料。目前为机械手配置的抓取装置只适用于圆管注肩,如果遇到扁管注肩,则无法满足生产需求。
技术实现要素:
3.本实用新型的目的是针对现有技术存在的不足,提供一种既能满足圆管注肩,也能满足扁管注肩生产需求的多功能软管抓取装置。
4.为实现上述目的,本实用新型多功能软管抓取装置采用的技术方案是:
5.一种多功能软管抓取装置,包括与机械手连接的基板,基板底部滑动连接有若干对夹板,每对夹板通过第一往复机构夹放软管,至少有一对夹板之间设置有与基板固接的压板,压板的底部设置有若干个用于套接软管上端口的芯棒,芯棒的下方设置有一对压条,基板设置有第二往复机构,第二往复机构驱使每对压条压扁软管的下端口。机械手从前道工位夹取软管时,芯棒插入软管的上端口,同时启动第一往复机构,芯棒和其两侧的夹板配合夹起软管,若是圆管注肩,则无需启动第二往复机构,直接将软管套接在圆柱状模芯的外侧,若是扁管注肩,则启动第二往复机构,第二往复机构驱使压条压扁软管的下端口,从而方便压扁的软管套入扁柱状模芯的外侧,夹板和压条松开软管后,压板将软管压到位,使软管能够整个套接在扁柱状模芯的外侧。
6.优选的,所述第一往复机构为第一气缸,第一气缸通过第一安装板固接于基板底部,第一气缸同时驱动两对夹板,两对夹板从左到右依次定义为第一夹板、第二夹板、第三夹板和第四夹板,第一夹板通过第一连接板固接第三夹板,第二夹板通过第二连接板固接第四夹板,第一、第二连接板与基板滑动连接,第二、第三夹板之间设置有随动器,随动器包括枢接于基板顶部的离合板,离合板的两侧开设有腰型孔,腰型孔内滑移有驱动轴,驱动轴通过l型杆同与其对应的夹板固接,第一气缸的伸缩端与第二或第三夹板固接。
7.优选的,所述第一、第二连接板顶部固接有第一滑块,第一滑块滑配有第一导轨,第一导轨固接于基板底部。
8.优选的,所述基板顶部设置有两个支架,支架通过第二往复机构往复运动,第二往复机构为第二气缸,第二气缸通过第二安装板固接于基板顶部,支架包括固接于第二气缸伸缩端的横梁,横梁的两端设置有竖梁,竖梁的底部设置有纵梁,纵梁的两端设置有用于安装压条的伸缩杆。
9.优选的,所述横梁底部固接有第二滑块,第二滑块滑配有第二导轨,第二导轨固接于基板顶部。
10.优选的,所述压条的侧壁开设有限位卡槽。
11.优选的,所述芯棒的两侧设置有对称的平面。
12.本实用新型与现有技术相比,具有以下优点:
13.1、在芯棒的下侧增加一对压条,不妨碍圆管注肩,同时能满足扁管注肩,即在两个压条的配合下,将软管的下端口压扁,从而便于将软管套接在扁柱状模芯的外侧。
14.2、压条的侧壁开设限位卡槽,防止软管在压扁过程中发生倾斜。
15.3、芯棒的两侧设置对称的平面,使得软管从上至下均能压扁,从而更利于套接在扁柱状模芯的外侧。
附图说明
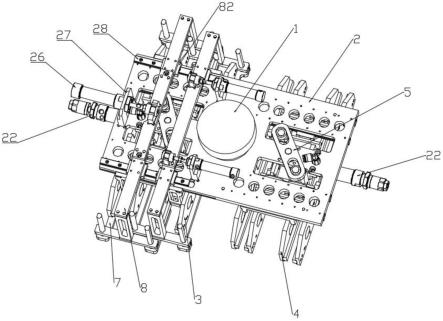
16.图1是本实用新型的多功能软管抓取装置的结构示意图;
17.图2是图1的侧视图;
18.图3是第一夹板组的结构示意图;
19.图4是随动器的结构示意图;
20.图5是支架的结构示意图;
21.图6是芯棒的结构示意图。
22.其中,1机械手,2基板,21第一导轨,22第一往复机构,23第一安装板,24压板,25竖板,26第二往复机构,27第二安装板,28第二导轨,3第一夹板组,31第一夹板,32第二夹板,33第三夹板,34第四夹板,35第一连接板,36第二连接板,37第一滑块,4第二夹板组,5随动器,51离合板,511腰型孔,52驱动轴,53l型杆,6芯棒,61平面,7压条,71限位卡槽,8支架,81横梁,82第二滑块,83竖梁,84纵梁,85伸缩杆。
具体实施方式
23.下面结合附图和具体实施方式,进一步阐明本实用新型,应理解这些实施方式仅用于说明本实用新型而不用于限制本实用新型的范围,在阅读了本实用新型之后,本领域技术人员对本实用新型的各种等价形式的修改均落于本技术所附权利要求所限定的范围。
24.如图1-6所示,一种多功能软管抓取装置,包括与机械手1连接的基板2,基板底部滑动连接四对夹板,两对处在基板左侧的夹板构成第一夹板组3,用于往模芯上套接软管,两对处在基板右侧的夹板构成第二夹板组4,用于从模芯上拔出已完成注肩的软管,第一夹板组和第二夹板组对称布置,第一夹板组从左到右依次定义为第一夹板31、第二夹板32、第三夹板33和第四夹板34,第一夹板通过第一连接板35固接第三夹板,第二夹板通过第二连接板36固接第四夹板,第一、第二连接板顶部固接第一滑块37,第一滑块滑配第一导轨21,第一导轨固接于基板底部,第二、第三夹板之间安装随动器5,随动器包括枢接于基板顶部的离合板51,离合板的两侧开设腰型孔511,腰型孔内滑移驱动轴52,驱动轴通过l型杆53同与其对应的夹板固接,第一夹板组通过第一往复机构22驱动夹放软管,第一往复机构为第一气缸,第一气缸通过第一安装板23固接于基板底部,第一气缸的伸缩端与第三夹板固接,将第一气缸的缸体伸向基板的外侧,使得整个装置的结构更加紧凑,避免整个装置的重量超出机械手的承受范围,第一夹板组的每对夹板之间布置压板24,压板两侧通过竖板25垂吊于基板下方,以避免与第一、第二连接板干涉,压板的底部安装四个用于套接软管上端口的芯棒6,芯棒的两侧加工成对称的平面61,芯棒的下方布置一对用于压扁软管下端口的压
条7,压条的侧壁开设限位卡槽71,防止软管在压扁过程中发生倾斜,压条通过支架8与基板滑动连接,支架通过第二往复机构26带动压条往复运动,第二往复机构为第二气缸,第二气缸通过第二安装板27固接于基板顶部,支架包括固接于第二气缸伸缩端的横梁81,横梁底部固接第二滑块82,第二滑块滑配第二导轨28,第二导轨固接于基板顶部,横梁的两端底部固接竖梁83,竖梁的底部固接纵梁84,纵梁的两端安装伸缩杆85,伸缩杆用于安装压条,压条可以通过伸缩杆调节高度,需要说明的是,为避免与机械手干涉,将处在内侧的第二气缸分为两个与横梁固接。
25.一种多功能软管抓取装置的具体工作过程与原理:扁管注肩时,调整芯棒的平面与两侧的夹板平行,芯棒插入软管的上端口,同时启动第一气缸,第一气缸推动第三夹板,第三夹板通过第一连接板带动第一夹板同时向右移动,第三夹板顶部的驱动轴驱使离合板转动,离合板通过另一侧的驱动轴驱动第二夹板,第二夹板通过第二连接板带动第四夹板同时向左移动,第一、第二夹板相向运动,将软管的上端口紧压在处在第一、第二夹板之间的芯棒的平面上,第三、第四夹板相向运动,将软管的上端口紧压在处在第三、第四夹板之间的芯棒的平面上,使得软管的上端口被挤压成扁状,机械手抬起后,软管从前道工序中被提取并送至扁柱状模芯的正上方,启动第二气缸,两个横梁相向运动,两对压条配合压扁软管的下端口,机械手将被压成扁状的软管套接在扁柱状模芯的上部,压板下行,将软管压到位,扁管注肩完成后,利用第二夹板组拔取;圆管注肩时,需要将芯棒旋转90
°
,使得芯棒的平面与两侧的夹板垂直,操作过程与扁管注肩大致相同,无需使用压条即可。本实用新型在芯棒的下侧增加一对压条,既能满足圆管注肩,也能满足扁管注肩生产需求。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1